离散时间信号的滤波技术与应用
发布时间: 2024-01-15 04:38:14 阅读量: 42 订阅数: 34 
# 1. 离散时间信号基础知识
## 1.1 离散时间信号的定义与特点
离散时间信号是以离散时间点上的数值序列表示的信号。在数字信号处理中,离散时间信号通常用来描述在离散时间点上的信号强度或幅度。离散时间信号与连续时间信号相比,具有以下特点:
- 信号仅在离散时间点上取样,而在两个取样点之间的数值未知;
- 信号的取样率会影响信号在频域的表示;
- 可以通过数字化的方式存储和处理。
在实际应用中,离散时间信号常常通过模数转换器(ADC)将模拟信号转换为离散时间信号,然后进行数字信号处理。
## 1.2 离散时间系统的基本概念
离散时间系统是对离散时间信号进行处理的系统,通常由差分方程或差分方程组表示。在离散时间系统中,常见的概念包括:
- 离散时间系统的输入输出关系;
- 离散时间系统的单位冲激响应;
- 离散时间系统的零状态响应和零输入响应。
## 1.3 傅里叶变换在离散时间信号中的应用
傅里叶变换是将一个信号从时域(或空间域)转换到频域的数学工具,可以揭示信号的频谱特性。在离散时间信号处理中,离散时间傅里叶变换(DTFT)和离散傅里叶变换(DFT)常常用于分析信号的频域特性,进行滤波器设计等。
下面我们将介绍数字滤波器原理与分类。
# 2. 数字滤波器原理与分类
### 2.1 数字滤波器的基本原理
数字滤波器是一种用于信号处理的重要工具,其基本原理是通过改变信号的幅度、相位或频率来实现滤波效果。数字滤波器可以分为两种类型:有限冲激响应(Finite Impulse Response,简称FIR)滤波器和无限冲激响应(Infinite Impulse Response,简称IIR)滤波器。
FIR滤波器的输出只依赖于当前和过去的输入样本,不存在反馈路径。它的特点是易于设计、稳定和线性相位响应。FIR滤波器的差分方程可以表示为:
```python
y[n] = b[0] * x[n] + b[1] * x[n-1] + b[2] * x[n-2] + ... + b[M] * x[n-M]
```
其中,y[n]表示输出样本,x[n]表示输入样本,b[0], b[1], ..., b[M]是滤波器的系数,M是滤波器的阶数。
与之相反,IIR滤波器的输出不仅依赖于当前和过去的输入样本,还依赖于过去的输出样本,存在反馈路径。它的特点是具有更高的滤波效果和更低的阶数。IIR滤波器的差分方程可以表示为:
```python
y[n] = b[0] * x[n] + b[1] * x[n-1] + b[2] * x[n-2] + ... + b[M] * x[n-M]
- a[1] * y[n-1] - a[2] * y[n-2] - ... - a[N] * y[n-N]
```
其中,a[1], a[2], ..., a[N]是反馈系数,N是滤波器的阶数。
### 2.2 FIR滤波器与IIR滤波器
FIR滤波器和IIR滤波器在设计和应用上有一些不同之处。
#### FIR滤波器的特点:
- 稳定性:FIR滤波器始终是稳定的,不会产生输出样本的无限值。
- 线性相位响应:FIR滤波器的相位响应是线性的,不会对信号的相位产生改变。
- 精确的频率响应控制:FIR滤波器可以实现几乎任意频率响应,因为它是通过设计滤波器的系数来实现的。
#### IIR滤波器的特点:
- 较高的滤波效果:相较于相同阶数的FIR滤波器,IIR滤波器可以实现相同的滤波效果。
- 高阶滤波器设计的可能性:IIR滤波器相对于FIR滤波器可以使用更低的阶数来实现相同的滤波效果。
- 由于反馈路径的存在,IIR滤波器的稳定性分析和设计相对困难。
### 2.3 数字滤波器的设计方法
设计数字滤波器的方法主要包括经典方法和优化方法。
#### 经典方法包括:
- 理想滤波器法:基于理想频率响应的设计方法,通过指定所需的频率响应来设计滤波器的系数。
- 巴特沃斯滤波器法:基于巴特沃斯极点和零点的设计方法,通过指定通带增益和截止频率来设计滤波器。
- 切比雪夫滤波器法:基于切比雪夫逼近理论的设计方法,通过指定通带波动和截止频率来设计滤波器。
#### 优化方法包括:
- 最小二乘法:通过最小化设定的目标函数来优化滤波器系数,得到更优的频率响应。
- 遗传算法:通过模拟生物进化过程来搜索最优滤波器系数。
设计数字滤波器时需要根据特定的应用需求选择不同的设计方法和滤波器类型。
# 3. 离散时间信号的滤波技术
离散时间信号的滤波技术是数字信号处理中的重要组成部分,它涉及到频率响应、稳定性分析和性能评价等方面的内容。在本章中,我们将深入探讨离散时间系统的滤波技术,为读者带来全面的认识和理解。
#### 3.1 离散时间系统的频率响应
离散时间系统的频率响应是描述系统对不同频率信号响应的特性,通常通过系统的频率响应函数来表示。常见的频率响应包括幅频特性和相频特性,它们能够帮助我们分析系统在不同频率下的性能表现,对滤波器的设计和优化起到至关重要的作用。
以下是使用Python语言计算FIR滤波器的频率响应的示例代码:
```python
import numpy as np
import matplotlib.pyplot as plt
# 生成FIR滤波器的系数
h = np.array([0.5, 0.5, 0.5])
# 计算频率响应
w, H = signal.freqz(h)
# 绘制幅频特性曲线
plt.figure()
plt.plot(w, 20 * np.log10(abs(H)))
plt.title('Frequency Response of FIR Filter')
plt.xlabel('Frequency (rad/sample)')
plt.ylabel('Gain (dB)')
plt.grid()
plt.show()
```
通过以上代码,我们可以得到FIR滤波器的幅频特性曲线,进而对滤波器的频率响应进行分析和评价。
#### 3.2 离散时间系统的稳定性分析
离散时间系统的稳定性是指当输入信号有界时,系统的输出是否始终保持有界。稳定性是衡量系统可靠性和实用性的重要指标,对于滤波器的设计和应用具有重要意义。
下面是使用Java语言对IIR滤波器进行稳定性分析的示例代码:
```java
public class StabilityAnalysis {
public static void main(String[] args) {
double[] a = {1.0, 0.5, 0.3}; // 分母系数
double maxA = Double.MIN_VALUE;
// 寻找系统函数分母系数的最大幅值
for (double coefficient : a) {
if (Math.abs(coefficient) > maxA) {
maxA = Math.abs(coefficient);
}
}
if (maxA < 1.0) {
System.out.println("The system is stable.");
} else {
System.out.println("The system is unstable.");
}
}
}
```
通过以上代码,我们可以对IIR滤波器的稳定性进行简单的判断,为系统的稳定性分析提供了实陏的参考。
#### 3.3 离散时间滤波器的性能评价指标
离散时间滤波器的性能评价指标包括通带波纹、阻带衰减、群延迟等,这些指标能够帮助我们评价滤波器在频率域和时域下的性能表现,为滤波器的设计和优化提供了依据。
下面是使用Go语言计算切比雪夫滤波器的通带波纹的示例代码:
```go
package main
import (
"fmt"
"math"
)
func main() {
rippleInDB := 1.0
delta := math.Sqrt(math.Pow(10, rippleInDB/10) - 1)
fmt.Printf("The passband ripple is: %.2f dB\n", 10*math.Log10(1+delta*delta))
}
```
以上代码可以计算出切比雪夫滤波器的通带波纹,进而对滤波器的性能进行评价。
通过本章的学习,读者将对离散时间系统的滤波技术有一个全面的了解,能够运用不同编程语言进行频率响应分析、稳定性分析和性能评价,为离散时间滤波器的应用提供了技术支持。
# 4. 常见的离散时间滤波器设计
#### 4.1 理想低通滤波器的设计与应用
理想低通滤波器是一种理论上的滤波器,具有截止频率确定、频率响应平坦的特点。其设计思路是将频率高于截止频率的信号完全去除,只保留低于截止频率的信号。
##### 代码示例(Python):
```python
import numpy as np
import matplotlib.pyplot as plt
def ideal_lowpass_filter(signal, cutoff_freq):
freq_spectrum = np.fft.fft(signal) # Perform Fourier Transform
freq_spectrum[np.abs(freq_spectrum) > cutoff_freq] = 0 # Apply lowpass filter
filtered_signal = np.fft.ifft(freq_spectrum) # Perform Inverse Fourier Transform
return np.real(filtered_signal)
# Generate a test signal
time = np.arange(0, 1, 0.001)
frequency = 10 # Frequency of the test signal
amplitude = 1 # Amplitude of the test signal
test_signal = amplitude * np.sin(2 * np.pi * frequency * time)
# Apply ideal lowpass filter with cutoff frequency of 5 Hz
cutoff_frequency = 5
filtered_signal = ideal_lowpass_filter(test_signal, cutoff_frequency)
# Plot the original and filtered signals
plt.figure(figsize=(10, 4))
plt.subplot(211)
plt.plot(time, test_signal)
plt.title('Original Signal')
plt.subplot(212)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏《离散时间信号序列特征、计算、抽样与应用》涵盖了离散时间信号分析领域的多个重要主题。从基本概念与方法开始,介绍了离散时间信号特征分析的基础概念和常用方法,例如幅度与相位的计算方法以及频谱特性与频谱分析技术。随后,专栏深入研究了离散时间信号的线性与非线性操作与应用、时域处理方法与实例分析、滤波技术与应用等内容,帮助读者更好地理解和使用离散时间信号。此外,专栏还涉及了抽样与重构技术、插值与外推方法、卷积与相关计算技巧、快速傅里叶变换与应用、频域滤波技术、自相关与互相关分析、自适应滤波技术与应用等方面的研究内容。最后,专栏还深入探讨了离散时间信号与图像处理的关联性。通过专栏中的文章,读者将能够全面了解离散时间信号的特征、计算、抽样与应用的相关知识,并应用于实际问题中。
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
R语言复杂数据管道构建:plyr包的进阶应用指南

# 1. R语言与数据管道简介
在数据分析的世界中,数据管道的概念对于理解和操作数据流至关重要。数据管道可以被看作是数据从输入到输出的转换过程,其中每个步骤都对数据进行了一定的处理和转换。R语言,作为一种广泛使用的统计计算和图形工具,完美支持了数据管道的设计和实现。
R语言中的数据管道通常通过特定的函数来实现
【R语言数据包mlr的深度学习入门】:构建神经网络模型的创新途径
# 1. R语言和mlr包的简介
## 简述R语言
R语言是一种用于统计分析和图形表示的编程语言,广泛应用于数据分析、机器学习、数据挖掘等领域。由于其灵活性和强大的社区支持,R已经成为数据科学家和统计学家不可或缺的工具之一。
## mlr包的引入
mlr是R语言中的一个高性能的机器学习包,它提供了一个统一的接口来使用各种机器学习算法。这极大地简化了模型的选择、训练
【R语言Capet包集成挑战】:解决数据包兼容性问题与优化集成流程
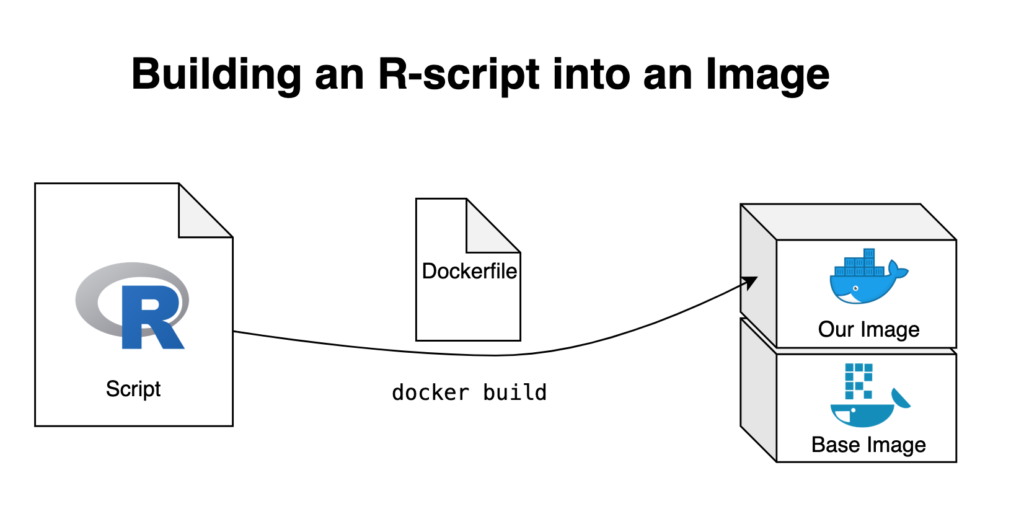
# 1. R语言Capet包集成概述
随着数据分析需求的日益增长,R语言作为数据分析领域的重要工具,不断地演化和扩展其生态系统。Capet包作为R语言的一个新兴扩展,极大地增强了R在数据处理和分析方面的能力。本章将对Capet包的基本概念、功能特点以及它在R语言集成中的作用进行概述,帮助读者初步理解Capet包及其在
时间数据统一:R语言lubridate包在格式化中的应用
# 1. 时间数据处理的挑战与需求
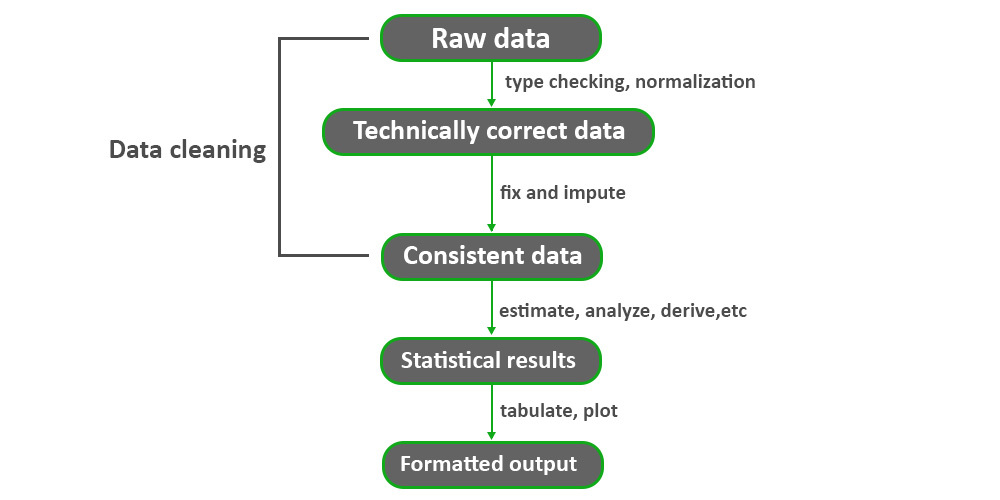
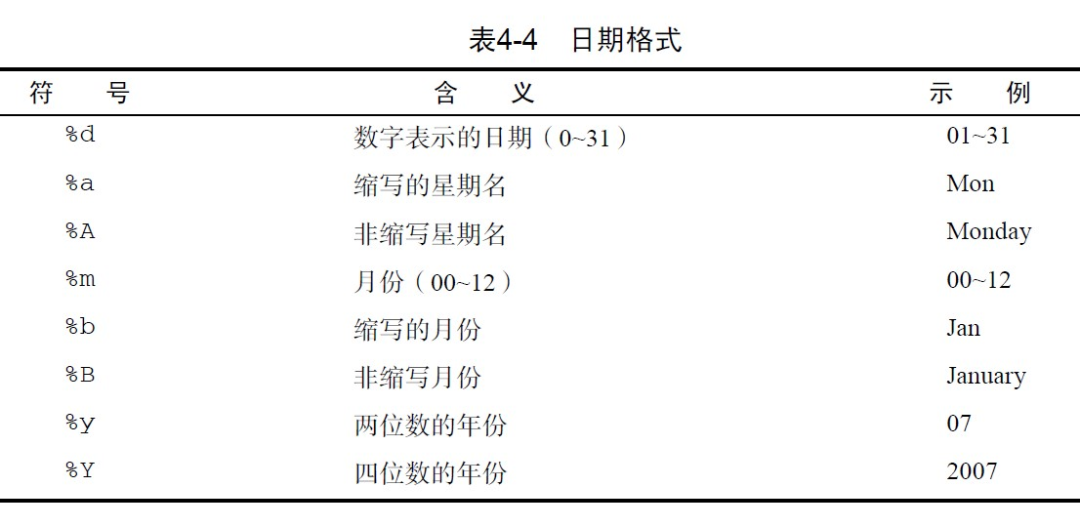
在数据分析、数据挖掘、以及商业智能领域,时间数据处理是一个常见而复杂的任务。时间数据通常包含日期、时间、时区等多个维度,这使得准确、高效地处理时间数据显得尤为重要。当前,时间数据处理面临的主要挑战包括但不限于:不同时间格式的解析、时区的准确转换、时间序列的计算、以及时间数据的准确可视化展示。
为应对这些挑战,数据处理工作需要满足以下需求:
dplyr包函数详解:R语言数据操作的利器与高级技术
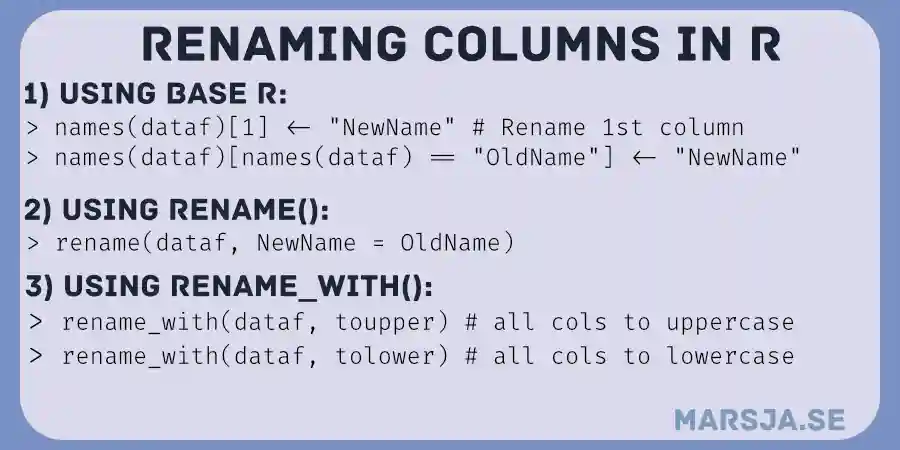
# 1. dplyr包概述
在现代数据分析中,R语言的`dplyr`包已经成为处理和操作表格数据的首选工具。`dplyr`提供了简单而强大的语义化函数,这些函数不仅易于学习,而且执行速度快,非常适合于复杂的数据操作。通过`dplyr`,我们能够高效地执行筛选、排序、汇总、分组和变量变换等任务,使得数据分析流程变得更为清晰和高效。
在本章中,我们将概述`dplyr`包的基
R语言数据处理高级技巧:reshape2包与dplyr的协同效果
# 1. R语言数据处理概述
在数据分析和科学研究中,数据处理是一个关键的步骤,它涉及到数据的清洗、转换和重塑等多个方面。R语言凭借其强大的统计功能和包生态,成为数据处理领域的佼佼者。本章我们将从基础开始,介绍R语言数据处理的基本概念、方法以及最佳实践,为后续章节中具体的数据处理技巧和案例打下坚实的基础。我们将探讨如何利用R语言强大的包和
stringr与模式匹配的艺术:掌握字符串匹配,实现数据精准提取

# 1. 字符串匹配与模式匹配基础
## 1.1 字符串匹配的基本概念
字符串匹配是计算机科学中的一个基础概念,它涉及到在一段文本(字符串)中寻找符合某种模式的子串的过程。对于模式匹配而言,核心是定义一种规则(模式),这种规则可以通过正则表达式来实现,进而高效地定位和提取文本数据。
## 1.2 模式匹配的重要性
在信息处理、文本分析、数据挖掘等领域,模式匹配是提取有用信息的重要工具。
【R语言caret包多分类处理】:One-vs-Rest与One-vs-One策略的实施指南
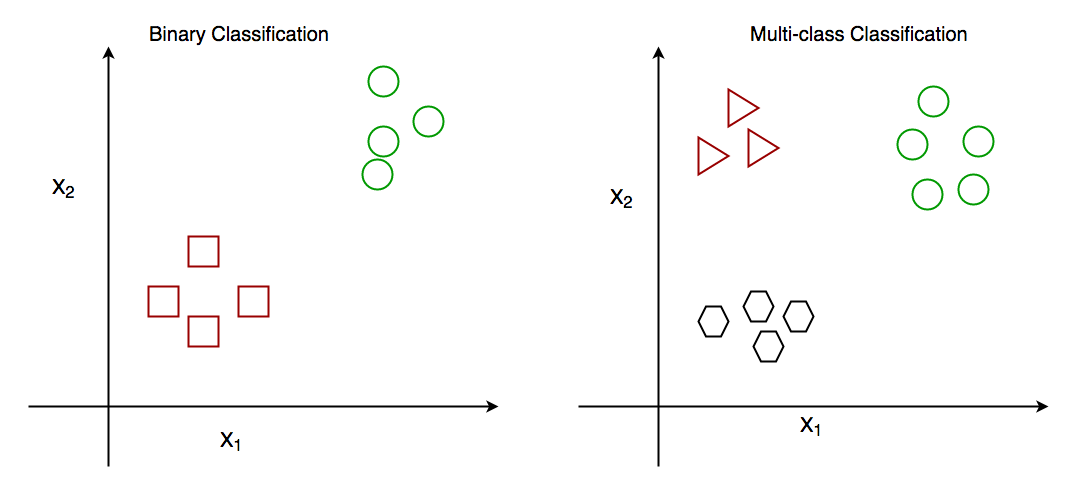
# 1. R语言与caret包基础概述
R语言作为统计编程领域的重要工具,拥有强大的数据处理和可视化能力,特别适合于数据分析和机器学习任务。本章节首先介绍R语言的基本语法和特点,重点强调其在统计建模和数据挖掘方面的能力。
## 1.1 R语言简介
R语言是一种解释型、交互式的高级统计分析语言。它的核心优势在于丰富的统计包
机器学习数据准备:R语言DWwR包的应用教程

# 1. 机器学习数据准备概述
在机器学习项目的生命周期中,数据准备阶段的重要性不言而喻。机器学习模型的性能在很大程度上取决于数据的质量与相关性。本章节将从数据准备的基础知识谈起,为读者揭示这一过程中的关键步骤和最佳实践。
## 1.1 数据准备的重要性
数据准备是机器学习的第一步,也是至关重要的一步。在这一阶
【多层关联规则挖掘】:arules包的高级主题与策略指南
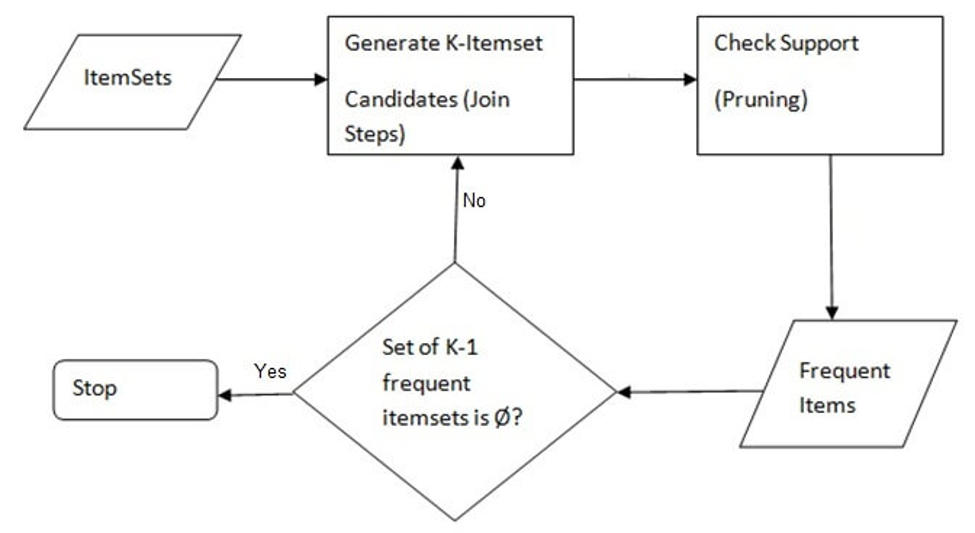
# 1. 多层关联规则挖掘的理论基础
关联规则挖掘是数据挖掘领域中的一项重要技术,它用于发现大量数据项之间有趣的关系或关联性。多层关联规则挖掘,在传统的单层关联规则基础上进行了扩展,允许在不同概念层级上发现关联规则,从而提供了更多维度的信息解释。本章将首先介绍关联规则挖掘的基本概念,包括支持度、置信度、提升度等关键术语,并进一步阐述多层关联规则挖掘的理论基础和其在数据挖掘中的作用。
## 1.1 关联规则挖掘
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )