RH850_U2A CAN Gateway性能加速:5大策略轻松提升数据传输速度
发布时间: 2024-12-27 18:44:07 阅读量: 5 订阅数: 5 

# 摘要
本文针对RH850_U2A CAN Gateway性能进行了深入分析,并探讨了基础性能优化策略。通过硬件升级与优化,包括选用高性能硬件组件和优化硬件配置与布局,以及软件优化的基本原则,例如软件架构调整、代码优化技巧和内存资源管理,提出了有效的性能提升方法。此外,本文深入探讨了数据传输协议的深度应用,特别是在CAN协议数据包处理、数据缓存与批量传输以及实时操作系统任务调度方面。在高级性能加速技术章节中,文章分析了多线程和异步I/O的运用,硬件加速器的集成,以及性能监控与动态优化的策略。最后,通过案例研究与实践,验证了所提优化策略的实际效果,并对未来的技术发展趋势进行了展望。
# 关键字
RH850_U2A CAN Gateway;性能分析;硬件升级;软件优化;数据传输协议;性能加速技术
参考资源链接:[RH850/U2A: CAN-FD Frame-Routing 智能网关技术解析](https://wenku.csdn.net/doc/39zzgrbjw3?spm=1055.2635.3001.10343)
# 1. RH850_U2A CAN Gateway性能分析
在汽车电子领域,控制器局域网络(CAN)总线作为车载通信系统的关键技术,保证了不同控制单元间高效可靠的信息交换。本章节将深入分析RH850_U2A CAN Gateway的性能特点,并探讨其在实际应用中可能遇到的性能瓶颈,为后续的性能优化打下坚实基础。
## 1.1 CAN Gateway架构理解
RH850_U2A CAN Gateway架构设计为处理多路CAN通信,确保数据在不同网络间的准确、高效传输。该架构通常包括数据过滤、转发、消息处理等模块,每个模块的性能都直接影响到整个系统的运行效率。
## 1.2 性能评估指标
评估RH850_U2A CAN Gateway性能时,关键指标包括吞吐量、延迟、数据包丢失率和稳定性等。例如,吞吐量是指在单位时间内系统能够处理的最大数据量,而延迟则是指从数据包进入系统到被完全处理输出所需的时间。
通过这些指标的综合分析,可以明确系统的性能边界,为接下来的性能调优提供方向。例如,若发现延迟较高,可能需要关注数据处理逻辑是否过于复杂,或系统是否能够更好地支持多线程处理。
本章节作为整篇文章的开篇,为我们展现了CAN Gateway系统性能分析的基础框架。接下来的章节将深入探讨如何通过不同的优化策略提高系统的整体性能。
# 2. 基础性能优化策略
在本章中,我们将深入探讨RH850_U2A CAN Gateway的性能优化策略。此章节将聚焦在两个核心方面:硬件升级与优化以及软件优化的基本原则。通过这些方法,我们将能够显著提高系统的性能,为用户提供更快更稳定的通信体验。
## 2.1 硬件升级与优化
硬件是系统性能的基础,适当的升级与优化可以带来立竿见影的效果。在本节中,我们将详细介绍硬件组件的选择与硬件配置优化策略。
### 2.1.1 选择高性能硬件组件
在选择硬件组件时,不仅要考虑成本,更要考虑性能。在RH850_U2A CAN Gateway中,选择高频率CPU、高速大容量的RAM、以及大容量且读写速度快的存储设备是非常重要的。此外,使用具有高稳定性和高数据传输率的网络接口卡(NIC)也是优化的关键部分。
### 2.1.2 优化硬件配置与布局
除了选择高性能的硬件外,硬件的配置与布局也对性能有显著影响。合理的布局能够减少信号干扰,提高系统的稳定性。而在配置方面,建议合理分配CPU核心,使得各个任务能够高效并行运行,从而提高整体性能。
## 2.2 软件优化的基本原则
软件层面的优化同样至关重要,软件架构、代码效率以及资源管理,都将直接影响到最终的性能表现。
### 2.2.1 软件架构的调整
良好的软件架构能够有效减少系统的复杂度,提高代码的可维护性和可扩展性。使用模块化设计,可以让系统的各个部分独立运行,避免出现单点故障。同时,采用合适的中间件和框架,可以进一步提高软件的效率。
### 2.2.2 代码优化技巧
代码层面的优化,对于性能的提升也是至关重要。以下是一些实用的代码优化技巧:
- 循环优化:减少循环内部的计算量,避免不必要的循环嵌套。
- 函数调用优化:减少函数调用的开销,尤其是在循环中调用的函数。
- 内存分配优化:减少动态内存分配的次数,预先分配大块内存。
- 使用高效的算法和数据结构,比如使用哈希表替代数组进行快速查找。
下面是一个代码优化的示例:
```c
// 示例代码:内存分配优化
int *array = malloc(sizeof(int) * N); // 预先分配足够大的内存空间
for (int i = 0; i < N; i++) {
array[i] = i; // 初始化数组元素
}
```
### 2.2.3 内存和资源管理
在内存管理方面,要注意防止内存泄漏,及时释放不再使用的内存。同样重要的是资源管理,例如文件描述符和网络连接的及时关闭,以避免资源耗尽。
```c
// 示例代码:防止内存泄漏
int *ptr = malloc(sizeof(int) * N);
// ... 使用ptr进行操作
free(ptr); // 操作完成后释放内存
ptr = NULL; // 避免野指针
```
以上示例展示了如何进行内存的申请和释放,避免内存泄漏。在编写代码时,应该确保类似的模式被遵循,以提升系统资源的有效利用率。
通过上述的硬件升级与优化、软件架构的调整、代码优化以及资源管理,RH850_U2A CAN Gateway的基础性能优化策略将有助于确保系统的高效、稳定和可扩展性。在下一章中,我们将探讨数据传输协议的深度应用,这是提升通信效率的关键所在。
# 3. 数据传输协议深度应用
## 3.1 CAN协议的数据包处理
### 3.1.1 数据包结构与解析
CAN(Controller Area Network)协议是一种有效支持分布式实时控制的串行通信网络协议。数据包(又称帧)的结构设计用于在电子控制单元(ECU)之间可靠地交换信息。CAN协议定义了两种主要的帧类型:数据帧和远程帧,其中数据帧用于发送数据,远程帧用于请求数据。
在解析CAN数据包时,关键是要理解其各个字段的含义和功能。数据帧通常包括帧起始、仲裁场、控制场、数据场和帧结束等部分。仲裁场包含标识符和远程发送请求位(RTR),控制场包含数据长度代码(DLC)和几个未使用的位,数据场包含实际要传输的数据,最后是帧结束部分。
在进行数据解析时,首先需要识别数据包的起始位和结束位,确保数据包的边界得到正确识别。之后,按照CAN协议规范对仲裁场和控制场进行分析,提取出标识符、数据长度以及数据本身。最后,根据数据包的内容做出相应的处理逻辑。
#### 代码块示例与解释
解析CAN数据包的伪代码可以写成如下:
```pseudo
function parseCANFrame(frame):
# Check for the start and end of the frame
if not isFrameStart(frame) or not isFrameEnd(frame):
return error("Invalid frame boundaries")
# Extract the arbitration ID and RTR (Remote Transmission Request) bit
arbitrationID, RTR = extractArbitrationIDAndRTR(frame)
# Extract the DLC (Data Length Code)
DLC = extractDLC(frame)
# Extract the data field
dataField = extractDataField(frame, DLC)
# Handle the data according to the application needs
return handleData(arbitrationID, RTR, dataField)
# Below are helper functions for extracting information from the CAN frame.
# Each function would have a detailed implementation based on the specific needs.
```
每个辅助函数都应具有详细的实现,基于具体的需要。例如,`isFrameStart` 和 `isFrameEnd` 函数用于检测帧的开始和结束位,`extractArbitrationIDAndRTR` 用于提取仲裁ID和RTR位,而`handleData`函数根据实际业务逻辑处理数据。
### 3.1.2 数据包过滤和优先级设置
在多节点的CAN网络中,数据包过滤和优先级设置对于防止信息拥堵和确保重要信息优先传输至关重要。每个CAN帧都携带一个29位或11位的仲裁ID,它用来确定消息的优先级和过滤。
过滤器允许特定的ECU只接收相关数据,忽略不重要的消息。这可以通过设置过滤器掩码和过滤器来完成,其中掩码定义了哪些位是固定的,哪些位参与过滤。
在CAN协议中,一个较低的仲裁ID值具有较高的优先级,因为CAN总线采用的是线“与”逻辑,所以仲裁ID数值较小的帧会胜出抢占总线。因此,实时性要求高的节点应分配较低的ID值。
#### 代码块示例与解释
以下是一个简化的代码示例,演示如何在软件层面上设置过滤规则:
```c
// CAN Filter Configuration Structure (example in C)
typedef struct {
uint32_t filterId; // The ID or mask to filter on
uint32_t filterMask; // The mask to apply when filtering
bool filterMode; // Denotes whether this is an ID filter or mask filter
} CAN_Filter_t;
// Function to set up a CAN filter
void setupCANFilter(CAN_Filter_t *filter, uint32_t id, uint32_t mask, bool mode) {
filter->filterId = id;
filter->filterMask = mask;
filter->filterMode = mode;
// Apply the filter configuration to the hardware CAN module
applyFilterConfiguration(filter);
}
// The applyFilterConfiguration function is hardware specific
void applyFilterConfiguration(CAN_Filter_t *filter) {
// Code to apply the filter configuration to the CAN module's hardware register
}
```
在上述代码中,`setupCANFilter` 函数用于配置CAN过滤器的ID、掩码和模式。`applyFilterConfiguration` 函数则是硬件特定的实现,将过滤器配置应用到CAN模块的硬件寄存器上。
## 3.2 数据缓存与批量传输
### 3.2.1 缓存策略的优化
在实时系统中,数据缓存是为了平滑处理速度不匹配和减少中断服务处理时间。缓存策略的优化有助于提高系统的整体性能和响应时间。
数据缓存策略优化应考虑以下因素:
- **缓存大小**:缓存应足够大以存储足够的数据包,但也不能过大以免导致内存浪费和管理开销。
- **缓存替换策略**:如先进先出(FIFO)、最少使用(LRU)或最近最少使用(MRU)策略。
- **缓存命中率**:需要监测和分析缓存命中率,优化数据存取效率。
#### 表格示例:缓存策略对比
| 策略 | 优点 | 缺点 | 适用场景 |
| --- | --- | --- | --- |
| FIFO | 实现简单,易于管理 | 难以适应数据访问模式的变化 | 流式数据处理 |
| LRU | 较好地反映了数据的访问频率 | 实现复杂度高 | 数据访问模式较为固定的应用 |
| MRU | 优化了缓存的“热点”数据访问 | 对缓存冷数据处理不佳 | 频繁访问热点数据的应用 |
### 3.2.2 批量传输机制的应用
批量传输机制可以减少CAN总线上的传输次数,通过在一个传输周期内发送多个数据包来降低通信开销。这种方式特别适用于周期性的数据更新,比如传感器数据的集中读取。
为了有效地使用批量传输,应进行以下操作:
- **分组数据更新**:将数据分成逻辑上相关的小组,以便一次性更新。
- **最小化启动延迟**:将准备好的数据包及时放入队列,避免不必要的延迟。
- **错误处理**:对于批量传输失败的数据包,应有重传机制。
#### 伪代码示例:批量传输的逻辑
```pseudo
function batchTransfer(dataGroups):
queue = initializeQueue()
foreach group in dataGroups:
if isGroupReady(group):
enqueue(queue, group)
if isQueueThresholdReached(queue):
performTransfer(queue)
clearQueue(queue)
if not isEmpty(queue):
performTransfer(queue)
function performTransfer(queue):
# This function would send the data in the queue via CAN network
# It should handle any errors and retransmit failed data packets if necessary
```
在上述逻辑中,`dataGroups` 是待发送的数据组,`initializeQueue` 初始化传输队列,`enqueue` 将数据组加入队列,`performTransfer` 是负责实际数据传输的函数。
## 3.3 实时操作系统的任务调度
### 3.3.1 实时内核的选择与配置
实时操作系统(RTOS)提供了一套任务调度机制,用于确保任务在规定的时间内完成。选择合适的RTOS内核是关键步骤,因为它直接影响系统的实时性能和稳定性。
在选择实时内核时,开发者需要考虑以下因素:
- **内核类型**:抢占式或协作式。抢占式内核通常更适合硬实时系统,协作式内核适用于对实时性要求不高的场合。
- **中断延迟**:内核中断响应时间应尽可能短。
- **支持的任务数量**:内核应支持足够数量的任务,以满足系统需求。
- **上下文切换时间**:应尽可能小,以减少任务切换的开销。
内核配置是一个精细的过程,可能包括设置任务优先级、堆栈大小和中断管理。合理的内核配置有助于提升系统的实时性能和资源利用率。
### 3.3.2 任务优先级与调度算法
任务优先级与调度算法是RTOS的核心,决定了任务如何被调度执行。常见的调度算法有:
- **固定优先级调度**:每个任务有一个静态分配的优先级,优先级高的任务先执行。
- **时间片轮转调度**:任务轮流占用CPU,每个任务在占用一定时间片后被挂起。
- **动态优先级调度**:任务的优先级可以在运行时改变,通常用于更复杂的应用场景。
任务优先级的分配和调度策略的选择对系统的性能影响巨大。优先级的分配应根据任务的重要性和实时性需求来决定,一般而言,实时性要求高的任务应分配较高的优先级。
#### 代码块示例:任务优先级与调度
```c
// Task definition with priority (example in C)
typedef struct {
void (*taskFunction)(void*); // Task function pointer
void *taskArg; // Argument to task function
uint8_t priority; // Task priority level
} Task_t;
// Task scheduler function (simplified)
void scheduleTasks(Task_t *taskList, size_t taskCount) {
for (size_t i = 0; i < taskCount; i++) {
if (shouldRun(taskList[i].priority)) {
taskList[i].taskFunction(taskList[i].taskArg);
}
}
}
// Should run function based on fixed priority scheduling
bool shouldRun(uint8_t taskPriority) {
// Pseudo code for checking if a task with higher priority is running
if (runningTaskPriority < taskPriority) {
return true; // Current task is of lower priority, preemption occurs
}
return false; // Continue current task execution
}
```
上述代码段简单地展示了任务结构的定义和一个非常简化的任务调度函数。`scheduleTasks` 函数按优先级遍历任务列表,并根据是否应该运行该任务来调用任务函数。`shouldRun` 函数示意性地展示了基于固定优先级调度的决策过程。
通过这些章节的深入探讨,读者应能对CAN数据包处理、数据缓存策略、批量传输机制以及实时操作系统的任务调度有了深刻的理解。这些知识是开发高性能实时通信系统不可或缺的部分。
# 4. 高级性能加速技术
## 4.1 多线程和异步I/O的运用
### 4.1.1 多线程模型的构建
在现代软件设计中,多线程是一种常见的提升性能的手段,尤其是在涉及到大量数据处理和I/O操作时,合理利用多线程可以显著提高程序的效率。构建多线程模型时,我们通常关注以下三个方面:线程安全、线程同步和线程池管理。
首先,线程安全是多线程编程中的首要关注点。为了防止数据竞争和条件竞争,必须使用锁、信号量、原子操作等同步机制来保护共享资源。例如,在C++中,可以使用`std::mutex`来同步线程访问,而在Java中可以使用`synchronized`关键字和`ReentrantLock`类。
其次,线程同步是指线程之间协调彼此操作的机制,确保线程按预期顺序执行。常见的同步机制包括事件、信号量、监视器和条件变量等。例如,使用`sem_wait`和`sem_post`函数在POSIX线程(pthread)中管理信号量,或者在.NET中使用`Monitor`类来管理线程同步。
最后,线程池管理是一种提高资源利用率和系统性能的技术。线程池可以重用固定数量的线程来执行任务,从而避免了频繁创建和销毁线程带来的开销。在Java中,可以使用`ExecutorService`接口来管理线程池,而在.NET中可以使用`ThreadPool`类。
```java
ExecutorService executor = Executors.newFixedThreadPool(10);
executor.execute(() -> {
// 执行任务代码
});
executor.shutdown();
```
在上述Java示例中,我们创建了一个包含10个线程的线程池,并提交了一个任务给它执行。
### 4.1.2 异步I/O的实现与优势
异步I/O模型允许程序发起一个或多个I/O操作后立即返回,而不用等待I/O操作的完成。这一机制在处理大量网络通信或磁盘操作时尤其有用,因为它可以显著减少程序在等待I/O操作完成时的空闲时间。
异步I/O的主要优势在于它能够提高程序的响应性和吞吐量。在传统的同步I/O模型中,线程在进行I/O操作时会被阻塞,直到操作完成。在异步I/O模型中,线程可以继续执行其他任务,直到I/O操作完成时再通过回调、事件或信号通知线程。
例如,在Node.js中,异步I/O是通过事件循环和回调函数实现的。以下是一个简单的异步读取文件的例子:
```javascript
const fs = require('fs');
fs.readFile('/path/to/file', (err, data) => {
if (err) {
console.error(err);
return;
}
console.log(data);
});
```
在这个例子中,`readFile`函数在读取文件时不会阻塞主线程,而是返回一个事件监听器,一旦读取完成,会调用回调函数。
## 4.2 硬件加速器的集成
### 4.2.1 加速器的选择标准
硬件加速器是一类特定的硬件组件,能够执行一些特定任务的处理比通用处理器更加高效。在性能优化中,正确选择和集成硬件加速器对于提升系统整体性能至关重要。
硬件加速器的选择应基于以下几个标准:
1. **任务类型**:硬件加速器根据其设计优化了特定类型的计算任务,例如图形处理单元(GPU)针对图形渲染和并行计算;现场可编程门阵列(FPGA)适合于需要高度定制和优化的逻辑任务。
2. **性能需求**:评估系统性能瓶颈,并明确加速器需要提供的性能提升水平,如计算速度、功耗比、I/O吞吐量等。
3. **兼容性和可编程性**:硬件加速器是否能够与现有系统集成,并且它的编程模型是否适应于开发团队的技术栈。
4. **成本效益**:除了购买成本,还要考虑软件开发、维护以及系统整体成本。
5. **生态系统支持**:加速器是否有成熟的工具链、社区支持和文档等。
### 4.2.2 集成方案与接口调优
硬件加速器的集成到系统中是一个复杂的工程,需要考虑与现有软件和硬件架构的兼容性,以及优化接口以确保高效数据传输。集成方案的制定一般分为以下几个步骤:
1. **系统分析**:分析现有系统的结构和瓶颈,确定加速器的集成点。
2. **硬件选择**:根据任务需求和评估标准选择合适的加速器。
3. **软件适配**:开发或修改软件来支持硬件加速器。对于FPGA,这可能包括硬件描述语言(HDL)的编写;对于GPU,可能涉及CUDA或OpenCL的编程。
4. **接口调优**:设计高效的通信接口和协议来实现主机与加速器之间的数据交换。例如,使用PCI Express总线进行高速数据传输。
5. **性能调优**:根据性能测试结果对系统进行调整,包括优化代码、调整数据路径和优化内存管理等。
6. **系统验证**:通过一系列的测试验证加速效果,确保系统稳定性和可靠性。
## 4.3 性能监控与动态优化
### 4.3.1 性能监控工具的使用
性能监控是优化过程中不可或缺的环节。它可以帮助我们识别系统瓶颈,验证优化效果并确保系统稳定运行。性能监控工具有很多,常见的包括:
- **top/htop**:在Linux系统中,这些命令行工具提供了实时的系统状态查看,包括CPU、内存使用和进程列表等。
- **sysstat**:一个包包含了`sar`命令,可以记录和报告系统的性能数据。
- **perf**:Linux下的性能分析工具,可以用来分析CPU使用情况,包括函数调用栈、指令执行等。
- **Grafana/Loki**:与Prometheus组合使用的时序数据库和数据可视化工具,可以展示实时的性能监控数据。
使用这些工具,我们可以收集到CPU使用率、内存使用、I/O操作、网络流量等关键性能指标。
```bash
# 使用perf查看CPU性能数据
sudo perf stat -a -r 5 sleep 10
```
在上述命令中,`perf stat`命令用于统计系统的性能指标,`-a`表示分析所有CPU,`-r`表示运行次数,`sleep 10`命令用于在分析期间保持系统空闲。
### 4.3.2 动态参数调整策略
动态参数调整指的是根据性能监控的结果动态地调整系统参数以优化性能。这可以是操作系统级别的参数,如CPU调度器的优先级调整,也可以是应用级别的参数,例如缓存大小和连接池配置。
动态调整策略通常涉及以下步骤:
1. **参数识别**:识别影响性能的关键参数。
2. **监控策略**:定义性能监控策略,决定何时收集数据,以及如何收集和分析。
3. **调整逻辑**:根据性能数据定义调整逻辑,比如当CPU使用率超过80%时增加处理线程数。
4. **执行调整**:根据调整逻辑,利用系统提供的API或其他工具动态调整参数。
5. **回滚机制**:当调整策略导致性能下降或系统不稳定时,可以回滚到之前的状态。
6. **日志记录**:记录每次调整的动作和结果,以便事后分析。
动态参数调整不仅可以优化运行时的性能,还能够增加系统的自适应能力,使得系统在不同的工作负载下都能保持较好的性能表现。
# 5. 案例研究与实践
在研究和实践过程中,理解和应用性能优化与加速技术至关重要。理论知识的实际应用不仅可以加深理解,还能展示这些技术在现实世界问题中的效果。接下来,本章节将深入探讨实际场景中的性能优化案例,常见问题的诊断与解决,以及未来技术的发展趋势。
## 5.1 实际场景下的性能优化案例
### 5.1.1 案例背景与目标
假设我们正在为一家汽车制造公司开发一个RH850_U2A CAN Gateway系统,该系统需要实时处理来自车辆不同部件的大量CAN消息。性能瓶颈分析显示,系统在高负载下,消息处理存在延迟,导致实时性不足。优化目标是减少消息处理延迟,提高系统的实时性和吞吐量。
### 5.1.2 优化步骤与效果分析
**优化步骤:**
1. **性能监控:** 利用性能监控工具对系统进行实时监控,收集数据包处理、内存使用、CPU负载等方面的性能数据。
2. **瓶颈分析:** 分析监控数据,定位到数据包解析和任务调度为性能瓶颈。
3. **优化调整:** 根据瓶颈分析结果,实施多线程模型构建,合理分配CPU资源,并对数据包处理流程进行优化。
4. **效果测试:** 在优化调整后,重新进行压力测试,验证性能改进情况。
**优化代码示例:**
```c
// 伪代码示例,展示多线程处理CAN消息
void processCANMessages() {
// 初始化多线程环境
initThreadPool();
// 创建消息处理线程
for (int i = 0; i < threadCount; i++) {
createThread(&messageHandler, i);
}
// 主线程等待所有任务完成
waitForThreadsToComplete();
}
// 消息处理函数
void messageHandler(void* arg) {
while (true) {
CANMessage msg = receiveMessage();
processMessage(msg);
}
}
```
**效果分析:**
通过优化步骤的实施,我们发现处理延迟显著降低,系统能够在高负载下保持稳定运行,实时性得到提升。CPU负载和内存使用率也均在合理范围内,验证了优化策略的有效性。
## 5.2 常见问题的诊断与解决
### 5.2.1 性能瓶颈的识别方法
性能瓶颈是指系统中限制整体性能的环节,其诊断方法多种多样,常见的有:
- **性能监控:** 使用专业工具监控系统运行时的各项性能指标。
- **压力测试:** 在极端情况下测试系统表现,发现潜在的瓶颈问题。
- **代码剖析(Profiling):** 分析代码执行过程中的热点区域和效率低下部分。
- **资源分析:** 检查CPU、内存、磁盘I/O等资源的使用情况。
### 5.2.2 典型问题的解决方案
**问题示例:**
在汽车系统中,我们可能遇到的一个典型问题是,数据包过滤规则设置不当导致大量无效数据占用系统资源。
**解决方案:**
- **优化过滤规则:** 重新评估并设置过滤规则,确保只有重要数据包被处理。
- **动态过滤策略:** 在运行时根据系统状态动态调整过滤规则。
- **资源分配:** 分配专用的处理单元处理高优先级数据包,确保核心业务不受影响。
## 5.3 未来展望与发展趋势
### 5.3.1 新技术对性能加速的可能影响
随着物联网和边缘计算的发展,新技术如AI算法集成、非易失性内存(NVM)和硬件加速器等,将对性能加速产生深远影响。
### 5.3.2 行业趋势与研发方向
汽车行业未来将更加注重智能化和网络化,数据处理和实时性要求将不断提高。因此,研发方向将聚焦于更高效的多线程架构、更智能的数据处理技术,以及更优化的系统集成方案。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
RH850/U2A CAN Gateway专栏是智能车载网络领域的一份全面指南,深入探究了RH850/U2A CAN Gateway的方方面面。从入门指南到高级应用,该专栏提供了10个秘诀,帮助读者从新手到专家。专栏还揭示了RH850/U2A CAN Gateway在智能车载网络中的关键作用,并提供了5大策略来提升数据传输速度。此外,专栏还提供了7个技巧来快速定位和解决故障,以及一个多协议转换和兼容性的速成指南。对于系统稳定性和实时监控,专栏提供了软硬件协同优化指南和数据追踪与诊断工具。专栏还展示了工业级应用案例,探讨了RH850/U2A CAN Gateway与以太网融合的趋势,并提供了跨平台开发和电源管理策略。最后,专栏分享了编程高手秘笈,以及数据记录和回放的应用之道。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
西门子V20变频器安装到调试:工业企业必备的5步骤指南

# 摘要
本文详细介绍了西门子V20变频器的基础知识、安装流程、参数配置、调试步骤以及维护与故障排除的方法。首先,概述了变频器的基本概念及其在工业自动化中的重要性。接着,系统地阐述了变频器的安装前准备、实际安装过程、以及安装后的检查与测试方法。文章还深入讲解了参数配置的原理、实践操作和验证优化过程,以及调试过程中可能遇到的问题和故障诊断技巧。最后,讨论了变频器
【PID调节技术深度剖析】:从理论到实战的完整指南
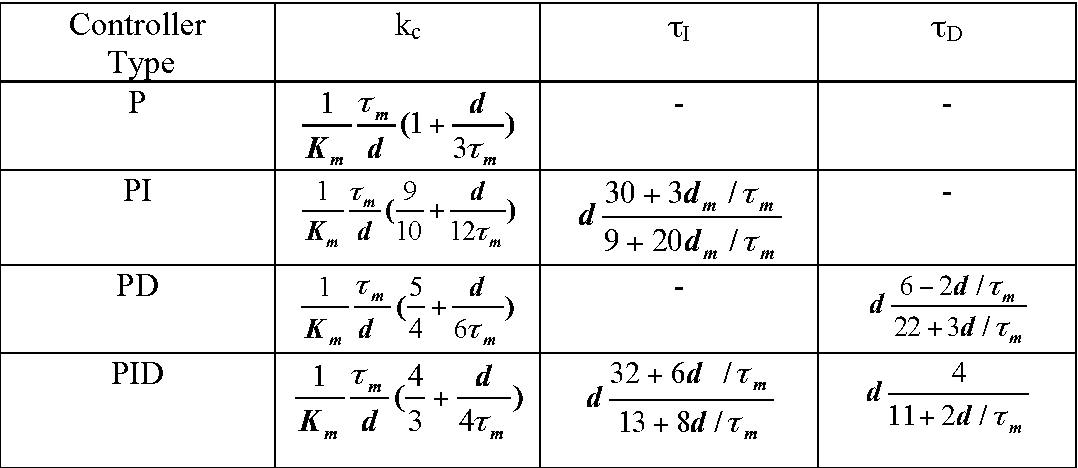
# 摘要
本文全面概述了PID调节技术的理论基础、实践应用以及高级优化策略。首先,介绍了PID控制器的工作原理和误差信号的处理机制。随后,深入分析了PID参数对系统性能的影响,并提供了参数调整的实验方法和案例。文章还探讨了PID控制器的稳定性问题,包括稳定性分析的数学模型和图形方法。在实践应用部分,本文详细论述了PID技术在工业控制、软件系统和自动化系统中的应用实例。最后
【文献管理大师课】:EndNote X7高级定制技巧全解析
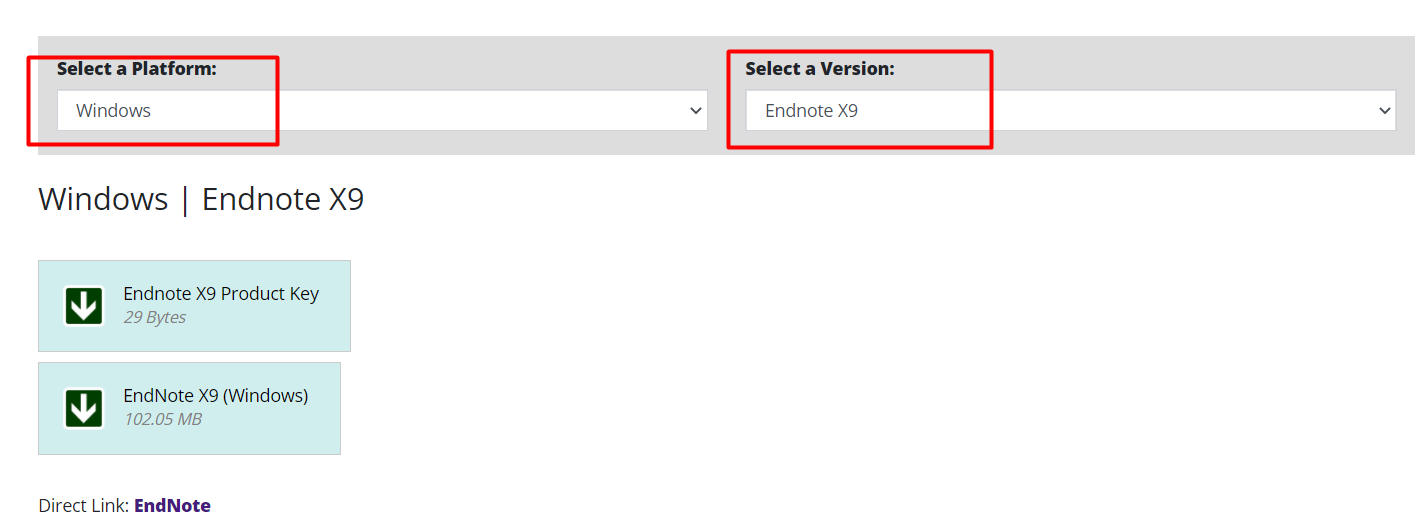
# 摘要
本文旨在全面介绍EndNote X7软件的核心功能和高级应用,涵盖文献管理、格式化引用、协同合作和未来发展趋势。第一章概述了EndNote X7的基本使用和个性化设置方法。第二章深入探讨了高级文献导入与管理技巧,包括文献数据处理、分类系统建立和检索技术提升。第三章详细说明了引用样式的定制与管理,以及如何在不同文档格式中应用这些引用。第四章着重介绍了高级搜索功能和与其他研究工具的集成,以及如何实现高效文献共享和协作。最后一章预测了EndNote
【SCSI技术革新】:如何在现代存储系统中应用SPC-4提升性能

# 摘要
本文系统性地介绍了SCSI技术及其在现代存储系统中的应用,并深入阐述了SPC-4协议的原理、特性、性能指标、兼容性问题以及在存储系统中的实际应用实践。通过分析SPC-4环境的配置和部署步骤,性能优化技巧,以及灾难恢复与数据完整性的保证措施,本文为读者提供了全面的SPC-4实施指南。此外,本文探讨了SPC-4技术与新兴技术的融合前景,行业标准的更新挑战,并通过案例研究,展望了SPC-
【时序逻辑基石】:扭环形计数器设计原理及应用案例(进阶技术全解读)
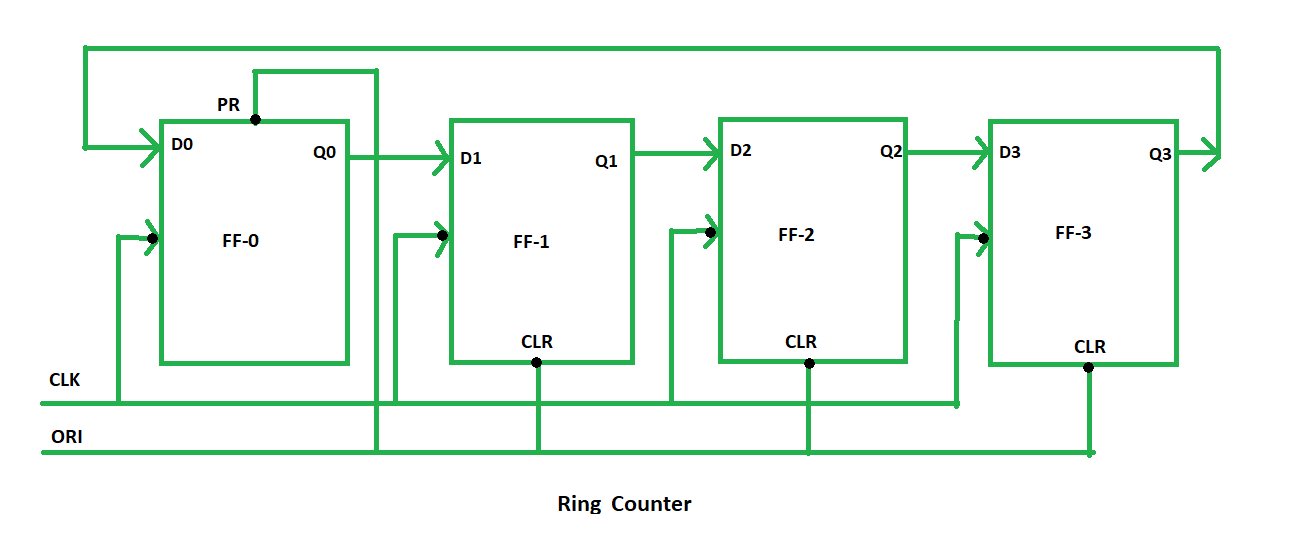
# 摘要
本文系统地介绍了扭环形计数器的设计原理、理论基础、设计实践、应用案例以及面临的未来趋势与挑战。文章首先概述了扭环形计数器的设计原理,随后深入探讨了其理论基础,包括数字电路与计数器的分类、环形计数器的工作机制以及扭环形计数器的设计要点。在此基础上,文中进一步阐释了扭环形计数器的设计过程、仿真测试和硬件实现,同时提供了工业自动化、数字通信系统以及特定领域应用的案例分析。最后,文章展望了扭环形
PUMA560轨迹规划艺术(5):精准高效操作的秘密
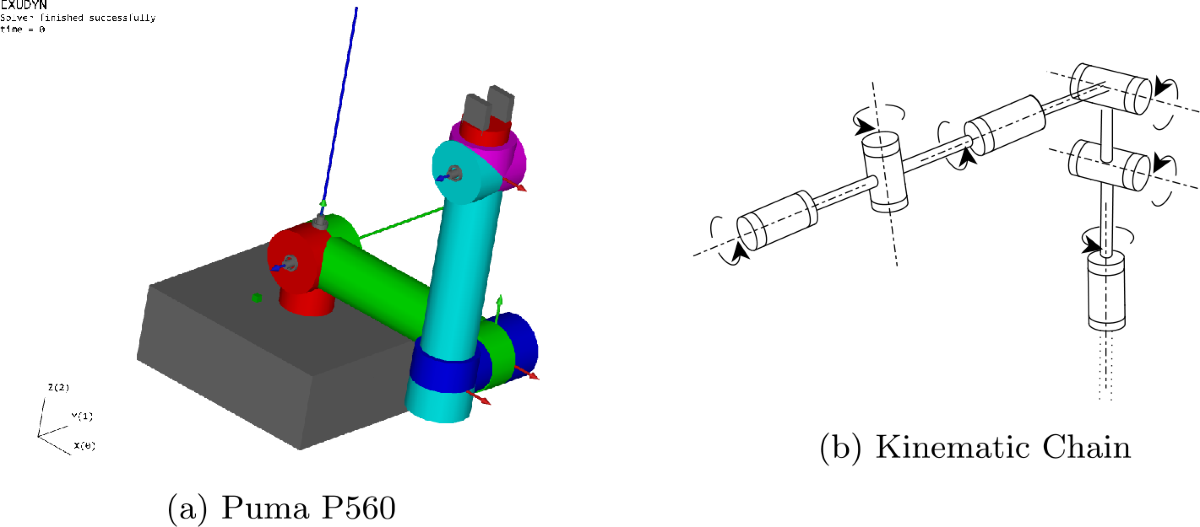
# 摘要
本论文对PUMA560机械臂的轨迹规划进行了全面的研究与分析。首先概述了机械臂的基本情况,随后介绍了轨迹规划的基础理论,包括机械臂运动学原理、轨迹规划的数学模型以及关键性能指标。论文详细探讨了离线和实时轨迹规划算法的设计与实现,并对轨迹优化技术及其应用进行了深入分析
揭秘FAE技术:GC0328手册中的性能提升秘诀及案例研究
# 摘要
FAE技术作为行业的重要组成部分,其性能优化对提升系统效率和稳定性具有关键作用。本文以GC0328为例,首先介绍了性能优化的基础概念、硬件特性及其对性能的影响,接着深入探讨了性能调优策略和监控分析技术。第二部分着重于GC0328在软件优化和硬件配置方面的性能提升实践案例。进一步,文章分析了GC0328的高级技术,包括并行处理、内存管理优化以及高级调试技术。最后,
【数据模型与性能优化】:住院管理数据库的高级架构设计

# 摘要
本文首先概述了住院管理数据库的基本概念与重要性,随后深入探讨了数据模型设计原理,涵盖了理论基础如实体关系模型和数据库规范化理论,同时介绍了高级数据模型技术如对象关系模型和多维数据模型,并探讨了设计实践中的实体识别与属性划分等关键步骤。性能优化的基本策略部
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )