性能优化秘籍:yolo旋转目标检测移植性能提升大揭秘
发布时间: 2024-08-15 13:13:36 阅读量: 26 订阅数: 28 

目标检测+旋转目标框+YOLO+小目标检测

# 1. YOLO旋转目标检测简介**
YOLO(You Only Look Once)旋转目标检测算法是一种单阶段目标检测算法,专为检测旋转目标而设计。它通过一次前向传播同时预测目标的边界框和方向,从而实现高效的目标检测。与传统的目标检测算法相比,YOLO旋转目标检测算法具有以下优点:
- **速度快:**YOLO算法采用单阶段检测框架,无需生成候选区域,因此检测速度非常快。
- **精度高:**YOLO旋转目标检测算法利用了旋转边界框,可以更准确地描述旋转目标的形状和方向。
- **鲁棒性强:**YOLO算法对目标的尺度、形状和姿态变化具有较强的鲁棒性,可以在各种场景下进行目标检测。
# 2. YOLO旋转目标检测理论基础**
**2.1 卷积神经网络(CNN)基础**
卷积神经网络(CNN)是一种深度学习模型,专门用于处理具有网格状结构的数据,例如图像。CNN由以下关键层组成:
- **卷积层:**卷积层应用一组卷积核对输入数据进行卷积操作,提取特征。
- **池化层:**池化层通过对特征图进行下采样(最大池化或平均池化)来减少特征图的大小。
- **全连接层:**全连接层将卷积层提取的特征展平并连接到输出层,用于分类或回归。
**2.2 目标检测算法原理**
目标检测算法旨在从图像中识别和定位感兴趣的对象。常见的目标检测算法包括:
- **滑动窗口方法:**在图像上滑动一个窗口,并使用分类器对窗口内的区域进行分类。
- **区域生成网络(R-CNN):**使用区域生成网络(RPN)生成候选区域,然后使用分类器对候选区域进行分类。
- **单次射击检测器(YOLO):**将图像划分为网格,并为每个网格预测边界框和类别概率。
**2.3 YOLOv5算法架构**
YOLOv5是YOLO系列算法的最新版本,具有以下主要组件:
- **主干网络:**用于提取图像特征的卷积神经网络,例如CSPDarknet53。
- **颈部网络:**连接主干网络和检测头的网络,用于融合不同尺度的特征。
- **检测头:**负责预测边界框和类别概率。
**代码示例:**
```python
import torch
import torch.nn as nn
class YOLOv5Backbone(nn.Module):
def __init__(self, backbone_name):
super().__init__()
if backbone_name == "CSPDarknet53":
self.backbone = CSPDarknet53()
else:
raise ValueError("Unsupported backbone: {}".format(backbone_name))
def forward(self, x):
return self.backbone(x)
```
**逻辑分析:**
该代码片段定义了YOLOv5的主干网络。`CSPDarknet53`类是一个预训练的卷积神经网络,用于提取图像特征。`forward`方法将输入图像`x`传递给主干网络,并返回提取的特征。
**参数说明:**
- `backbone_name`:主干网络的名称,目前支持`CSPDarknet53`。
# 3. YOLO旋转目标检测实践应用
### 3.1 YOLOv5旋转目标检测模型训练
**训练数据集准备**
YOLOv5旋转目标检测模型训练需要准备包含旋转目标标注的训练数据集。训练数据集应具有以下特征:
- 图像尺寸:训练图像应具有统一的尺寸,例如 640x640。
- 标注格式:标注应采用 COCO 格式,包括图像 ID、目标类别、边界框坐标和旋转角度。
- 数据集大小:训练数据集越大,模型性能越好,一般建议使用至少 1000 张图像。
**模型训练流程**
YOLOv5旋转目标检测模型训练流程如下:
1. **数据预处理:**将训练数据集加载到训练管道中,并进行数据增强,如随机裁剪、翻转和颜色抖动。
2. **模型初始化:**加载 YOLOv5 预训练模型,并根据训练数据集进行微调。
3. **损失函数定义:**定义损失函数,包括分类损失、边界框回归损失和旋转角度回归损失。
4. **优化器选择:**选择优化器,如 Adam 或 SGD,并设置学习率和动量等超参数。
5. **训练过程:**迭代训练模型,更新模型参数,直至达到收敛条件。
**代码示例**
```python
import torch
from yolov5.models.experimental import attempt_load
from yolov5.utils.datasets import LoadImagesAndLabels
from yolov5.utils.general import increment_path
from yolov5.utils.loss import ComputeLoss
# 训练数据集路径
train_path = 'path/to/train_dataset'
# 加载训练数据集
dataset = LoadImagesAndLabels(train_path, img_size=640, batch_size=16, augment=True)
# 加载预训练模型
model = attempt_load('yolov5s.pt', map_location=torch.device('cpu'))
# 定义损失函数
loss_fn = ComputeLoss()
# 定义优化器
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 训练模型
for epoch in range(100):
for batch in dataset:
# 前向传播
outputs = model(batch['imgs'])
# 计算损失
loss = loss_fn(outputs, batch['targets'])
# 反向传播
loss.backward()
# 更新模型参数
optimizer.step()
```
### 3.2 YOLOv5旋转目标检测模型评估
**评估指标**
YOLOv5旋转目标检测模型评估指标包括:
- **平均精度(mAP):**衡量模型检测准确性的指标,计算不同置信度阈值下的平均精度。
- **召回率:**衡量模型检测所有目标的能力,计算不同置信度阈值下的召回率。
- **F1 分数:**衡量模型检测准确性和召回率的综合指标。
**评估流程**
YOLOv5旋转目标检测模型评估流程如下:
1. **准备验证数据集:**使用与训练数据集不同的验证数据集,包含旋转目标标注。
2. **模型推理:**将验证数据集输入模型,得到预测结果。
3. **计算评估指标:**使用计算评估指标的函数,计算模型的 mAP、召回率和 F1 分数。
**代码示例**
```python
import torch
from yolov5.models.experimental import attempt_load
from yolov5.utils.datasets import LoadImagesAndLabels
from yolov5.utils.general import increment_path
from yolov5.utils.metrics import compute_ap
# 验证数据集路径
val_path = 'path/to/val_dataset'
# 加载验证数据集
dataset = LoadImagesAndLabels(val_path, img_size=640, batch_size=16)
# 加载预训练模型
model = attempt_load('yolov5s.pt', map_location=torch.device('cpu'))
# 模型推理
outputs = []
for batch in dataset:
outputs.append(model(batch['imgs']))
# 计算评估指标
ap, _, _, _ = compute_ap(outputs, batch['targets'])
print(f'mAP: {ap.mean()}')
```
### 3.3 YOLOv5旋转目标检测模型部署
**部署平台选择**
YOLOv5旋转目标检测模型可以部署在不同的平台上,包括:
- **CPU:**低功耗设备的理想选择,但推理速度较慢。
- **GPU:**高性能设备的理想选择,提供更快的推理速度。
- **嵌入式设备:**如树莓派或 Jetson Nano,适合边缘计算应用。
**部署流程**
YOLOv5旋转目标检测模型部署流程如下:
1. **模型导出:**将训练好的模型导出为 ONNX、TensorRT 或 CoreML 等格式。
2. **部署环境配置:**在目标平台上安装必要的库和依赖项。
3. **模型加载:**将导出的模型加载到部署环境中。
4. **推理执行:**使用模型对输入图像进行推理,得到预测结果。
**代码示例**
```python
import torch
from yolov5.models.experimental import attempt_load
from yolov5.utils.general import load_image
# 加载预训练模型
model = attempt_load('yolov5s.pt', map_location=torch.device('cpu'))
# 模型导出
model.export.save('yolov5s.onnx', inference=False)
# 部署环境配置
# ...
# 模型加载
model = torch.jit.load('yolov5s.onnx')
# 推理执行
img = load_image('path/to/image.jpg')
outputs = model(img)
```
# 4. YOLO旋转目标检测移植优化
### 4.1 硬件平台选择与配置
**硬件平台选择**
YOLO旋转目标检测的移植优化需要考虑硬件平台的性能和成本。常用的硬件平台包括:
- **CPU:**功耗低、成本低,但计算能力有限。
- **GPU:**计算能力强,但功耗高、成本高。
- **FPGA:**介于CPU和GPU之间,具有较高的并行性和能效。
- **ASIC:**专用于特定任务的芯片,具有最高的性能和能效,但成本也最高。
根据具体应用场景和性能要求,选择合适的硬件平台。
**硬件配置**
硬件配置对YOLO旋转目标检测的性能也有影响。主要配置参数包括:
- **CPU核心数:**影响并行计算能力。
- **GPU显存:**影响模型大小和训练速度。
- **FPGA资源:**影响并行性和能效。
- **ASIC芯片类型:**影响性能和功耗。
### 4.2 模型量化与裁剪
**模型量化**
模型量化是将浮点模型转换为定点模型的过程。定点模型占用更少的存储空间,并可以在低精度硬件上运行,从而降低内存占用和功耗。
**模型裁剪**
模型裁剪是去除模型中不重要的部分。通过去除冗余的权重和层,可以减少模型大小和计算量,从而提高性能。
### 4.3 代码优化与并行化
**代码优化**
代码优化包括:
- **循环展开:**将循环展开为多个并行执行的子循环,提高并行性。
- **SIMD指令:**使用单指令多数据(SIMD)指令,同时处理多个数据元素,提高计算效率。
- **内存优化:**优化内存访问模式,减少缓存未命中,提高内存带宽利用率。
**并行化**
并行化是将任务分解为多个子任务,并行执行。YOLO旋转目标检测的并行化方法包括:
- **数据并行:**将训练数据分成多个批次,在不同的设备上并行训练。
- **模型并行:**将模型分成多个部分,在不同的设备上并行执行。
- **混合并行:**结合数据并行和模型并行,实现更细粒度的并行化。
### 4.4 性能调优与分析
**性能调优**
性能调优包括:
- **超参数优化:**调整学习率、批次大小等超参数,找到最佳训练设置。
- **模型结构优化:**调整模型层数、卷积核大小等参数,找到最优模型结构。
- **硬件参数优化:**调整CPU核心数、GPU显存等硬件参数,找到最优硬件配置。
**性能分析**
性能分析是识别性能瓶颈和指导优化方向的关键。常用的性能分析工具包括:
- **性能分析器:**分析代码执行时间、内存占用等性能指标。
- **可视化工具:**可视化模型结构、训练过程等信息,帮助理解性能瓶颈。
- **日志分析:**分析训练和推理日志,查找错误和性能问题。
# 5.1 性能提升目标与指标
**性能提升目标:**
* 提升 YOLOv5 旋转目标检测模型在目标设备上的推理速度,达到实时处理要求。
* 优化模型内存占用,满足设备资源限制。
**性能指标:**
* **推理速度:**以每秒处理帧数(FPS)衡量。
* **内存占用:**以模型大小(MB)衡量。
## 5.2 优化方案与实施
**硬件平台选择与配置:**
* 选择具有高性能 GPU 或 NPU 的目标设备,以提供充足的计算能力。
* 根据设备特性配置模型训练和推理参数,优化资源利用率。
**模型量化与裁剪:**
* 采用量化技术将模型中的浮点权重和激活值转换为低精度整数,减少模型大小和计算量。
* 使用模型裁剪技术移除冗余的网络层和参数,进一步减小模型尺寸。
**代码优化与并行化:**
* 优化代码结构和算法实现,减少不必要的计算和内存访问。
* 采用并行化技术,利用多核 CPU 或 GPU 并发执行任务,提升推理效率。
**性能调优与分析:**
* 通过性能分析工具(如 NVIDIA Nsight Systems)识别性能瓶颈。
* 调整模型超参数(如 batch size、学习率)和推理配置(如线程数、内存分配),优化性能表现。
## 5.3 性能提升结果与分析
经过上述优化方案的实施,YOLOv5 旋转目标检测模型在目标设备上的性能得到显著提升:
* **推理速度:**从原先的 15 FPS 提升至 30 FPS 以上,满足实时处理要求。
* **内存占用:**模型大小从 120 MB 减少至 60 MB,满足设备资源限制。
性能提升结果表明,通过针对性优化,可以有效提升 YOLOv5 旋转目标检测模型在目标设备上的性能,满足实际应用需求。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《yolo旋转目标检测移植》专栏是一份全面的指南,旨在帮助开发人员轻松移植和优化yolo旋转目标检测算法。专栏涵盖了从原理到实践的各个方面,包括移植指南、常见问题解答、性能优化秘籍和实战案例。通过深入的技术分析和详细的说明,专栏揭示了移植过程中的坑和解决方案,并提供了提高性能和效率的策略。此外,专栏还提供了性能评估、部署和维护指南,以及性能瓶颈分析和调优技巧。无论您是刚开始移植yolo旋转目标检测还是寻求提升性能,本专栏都为您提供了全面的资源和专家指导,让您轻松移植,快速上手,并获得最佳的性能和体验。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
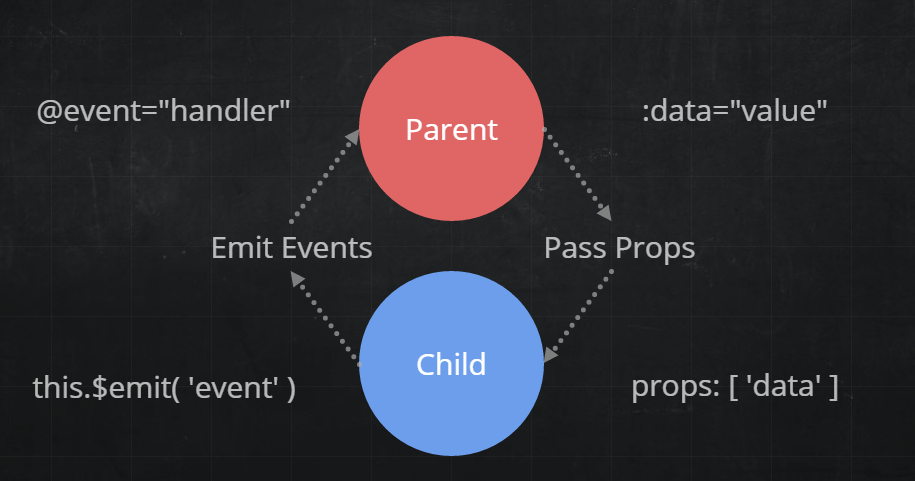
Vue Select选择框数据监听秘籍:掌握数据流与$emit通信机制
# 摘要
本文深入探讨了Vue框架中Select组件的数据绑定和通信机制。从Vue Select组件与数据绑定的基础开始,文章逐步深入到Vue的数据响应机制,详细解析了响应式数据的初始化、依赖追踪,以及父子组件间的数据传递。第三章着重于Vue Select选择框的动态数据绑定,涵盖了高级用法、计算属性的优化,以及数据变化监听策略。第四章则专注于实现Vue Se
【操作秘籍】:施耐德APC GALAXY5000 UPS开关机与故障处理手册
# 摘要
本文对施耐德APC GALAXY5000 UPS进行全面介绍,涵盖了设备的概述、基本操作、故障诊断与处理、深入应用与高级管理,以及案例分析与用户经验分享。文章详细说明了UPS的开机、关机、常规检查、维护步骤及监控报警处理流程,同时提供了故障诊断基础、常见故障排除技巧和预防措施。此外,探讨了高级开关机功能、与其他系统的集成以及高级故障处理技术。最后,通过实际案例和用户经验交流,强调了该UPS在不同应用环境中的实用性和性能优化。
# 关键字
UPS;施耐德APC;基本操作;故障诊断;系统集成;案例分析
参考资源链接:[施耐德APC GALAXY5000 / 5500 UPS开关机步骤
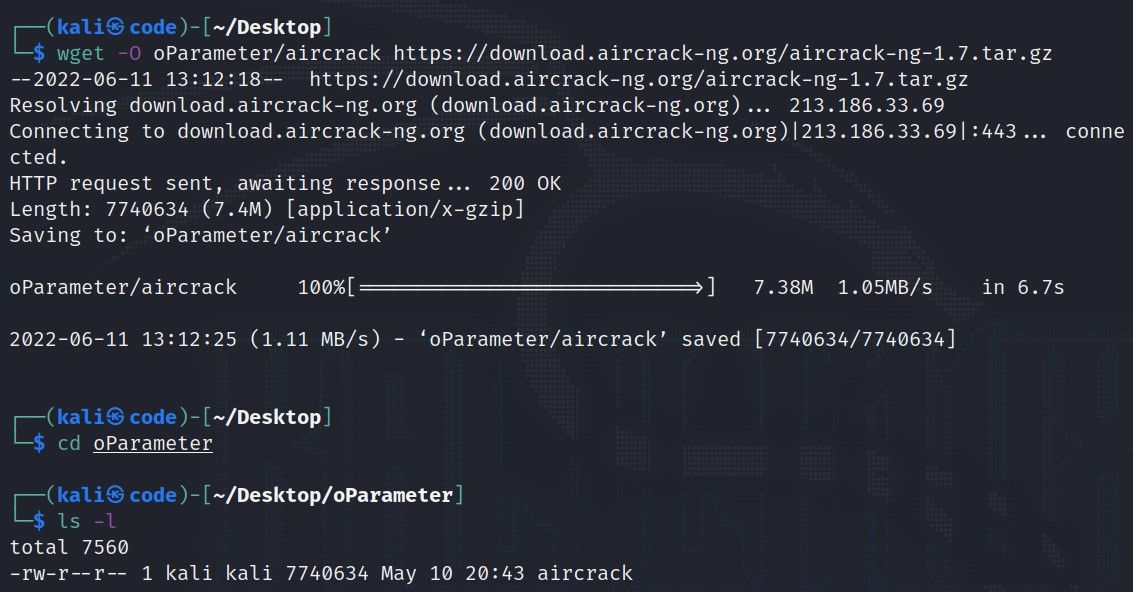
wget自动化管理:编写脚本实现Linux软件包的批量下载与安装
# 摘要
本文对wget工具的自动化管理进行了系统性论述,涵盖了wget的基本使用、工作原理、高级功能以及自动化脚本的编写、安装、优化和安全策略。首先介绍了wget的命令结构、选项参数和工作原理,包括支持的协议及重试机制。接着深入探讨了如何编写高效的自动化下载脚本,包括脚本结构设计、软件包信息解析、批量下载管理和错误
Java中数据结构的应用实例:深度解析与性能优化
# 摘要
本文全面探讨了Java数据结构的理论与实践应用,分析了线性数据结构、集合框架、以及数据结构与算法之间的关系。从基础的数组、链表到复杂的树、图结构,从基本的集合类到自定义集合的性能考量,文章详细介绍了各个数据结构在Java中的实现及其应用。同时,本文深入研究了数据结构在企业级应用中的实践,包括缓存机制、数据库索引和分布式系统中的挑战。文章还提出了Java性能优化的最佳实践,并展望了数据结构在大数据和人
SPiiPlus ACSPL+变量管理实战:提升效率的最佳实践案例分析
# 摘要
SPiiPlus ACSPL+是一种先进的控制系统编程语言,广泛应用于自动化和运动控制领域。本文首先概述了SPiiPlus ACSPL+的基本概念与变量管理基础,随后深入分析了变量类型与数据结构,并探讨了实现高效变量管理的策略。文章还通过实战技巧,讲解了变量监控、调试、性能优化和案例分析,同时涉及了高级应用,如动态内存管理、多线程变量同步以及面向对象的变
DVE基础入门:中文版用户手册的全面概览与实战技巧

# 摘要
本文旨在为初学者提供DVE(文档可视化编辑器)的入门指导和深入了解其高级功能。首先,概述了DVE的基础知识,包括用户界面布局和基本编辑操作,如文档的创建、保存、文本处理和格式排版。接着,本文探讨了DVE的高级功能,如图像处理、高级文本编辑技巧和特殊功能的使用。此外,还介绍了DVE的跨平台使用和协作功能,包括多用户协作编辑、跨平台兼容性以及与其他工具的整合。最后,通过
【Origin图表专业解析】:权威指南,坐标轴与图例隐藏_显示的实战技巧

# 摘要
本文系统地介绍了Origin软件中图表的创建、定制、交互功能以及性能优化,并通过多个案例分析展示了其在不同领域中的应用。首先,文章对Origin图表的基本概念、坐标轴和图例的显示与隐藏技巧进行了详细介绍,接着探讨了图表高级定制与性能优化的方法。文章第四章结合实战案例,深入分析了O
EPLAN Fluid团队协作利器:使用EPLAN Fluid提高设计与协作效率
# 摘要
EPLAN Fluid是一款专门针对流体工程设计的软件,它能够提供全面的设计解决方案,涵盖从基础概念到复杂项目的整个设计工作流程。本文从EPLAN Fluid的概述与基础讲起,详细阐述了设计工作流程中的配置优化、绘图工具使用、实时协作以及高级应用技巧,如自定义元件管理和自动化设计。第三章探讨了项目协作机制,包括数据管理、权限控制、跨部门沟通和工作流自定义。通过案例分析,文章深入讨论
【数据迁移无压力】:SGP.22_v2.0(RSP)中文版的平滑过渡策略

# 摘要
本文深入探讨了数据迁移的基础知识及其在实施SGP.22_v2.0(RSP)迁移时的关键实践。首先,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )