精准锁定动态物体:OpenCV图像几何变换在目标跟踪中的应用
发布时间: 2024-08-08 20:22:05 阅读量: 30 订阅数: 40 

OpenCV图像几何变换之透视变换
# 1. 图像几何变换基础
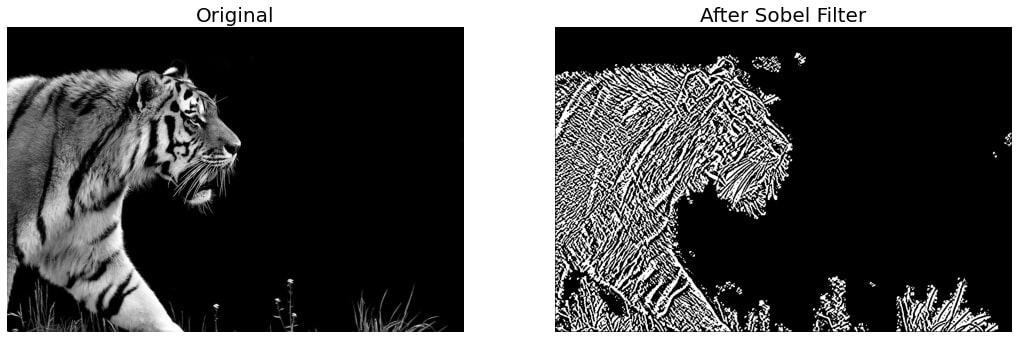
图像几何变换是计算机视觉中一项基本技术,用于操作和处理图像。它涉及将图像从一个坐标系变换到另一个坐标系,从而改变图像的大小、形状或位置。
图像几何变换有许多不同的类型,包括平移、旋转、缩放、剪切和透视变换。每种变换都具有不同的参数和效果,可以用于各种图像处理任务,例如图像对齐、图像增强和目标跟踪。
# 2. 目标跟踪算法原理
目标跟踪算法旨在连续估计目标在视频序列中的位置和大小。根据所采用的方法,目标跟踪算法可分为以下三类:
### 2.1 基于运动估计的目标跟踪
#### 2.1.1 光流法
光流法是一种基于目标运动的跟踪算法。它假设图像中相邻帧之间的像素具有相同的运动向量。通过计算像素的运动向量,可以估计目标的运动。
**代码块:**
```python
import cv2
# 初始化光流算法
optical_flow = cv2.optflow.createOptFlow_Farneback()
# 逐帧处理视频序列
while True:
# 读取下一帧
ret, frame = cap.read()
if not ret:
break
# 计算光流
flow = optical_flow.calc(prev_frame, frame, None)
# 可视化光流
cv2.imshow('光流', flow)
prev_frame = frame
# 按任意键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
```
**逻辑分析:**
* `cv2.optflow.createOptFlow_Farneback()`:创建 Farneback 光流算法对象。
* `optical_flow.calc()`:计算两帧之间的光流。
* `cv2.imshow()`:显示光流可视化结果。
#### 2.1.2 帧差法
帧差法是一种简单但有效的跟踪算法。它通过计算相邻帧之间的像素差异来检测运动。如果差异超过阈值,则认为像素属于目标。
**代码块:**
```python
import cv2
# 初始化背景模型
background = None
# 逐帧处理视频序列
while True:
# 读取下一帧
ret, frame = cap.read()
if not ret:
break
# 将帧转换为灰度
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 如果背景模型为空,则初始化
if background is None:
background = gray
continue
# 计算帧差
frame_diff = cv2.absdiff(gray, background)
# 二值化帧差
thresh = cv2.threshold(frame_diff, 30, 255, cv2.THRESH_BINARY)[1]
# 寻找轮廓
contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 找出最大的轮廓
max_contour = max(contours, key=cv2.contourArea)
# 绘制轮廓
cv2.drawContours(frame, [max_contour], -1, (0, 255, 0), 2)
# 显示帧
cv2.imshow('目标跟踪', frame)
# 按任意键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
```
**逻辑分析:**
* `cv2.cvtColor()`:将帧转换为灰度。
* `cv2.absdiff()`:计算帧差。
* `cv2.threshold()`:二值化帧差。
* `cv2.findContours()`:寻找轮廓。
* `max()`:找出最大的轮廓。
* `cv2.drawContours()`:绘制轮廓。
### 2.2 基于特征匹配的目标跟踪
#### 2.2.1 特征点提取和匹配
特征点提取和匹配是基于特征匹配的目标跟踪算法的基础。特征点是图像中具有独特特征的点,例如角点或边缘点。通过提取和匹配特征点,可以跟踪目标在不同帧中的位置。
**代码块:**
```python
import cv2
# 初始化特征检测器和描述符
detector = cv2.FeatureDetector_create('SURF')
descriptor = cv2.DescriptorExtractor_create('SURF')
# 提取目标特征
target_image = cv2.imread('target.jpg')
target_keypoints, target_descriptors = detector.detectAndCompute(target_image, None)
# 逐帧处理视频序列
while True:
# 读取下一帧
ret, frame = cap.read()
if not ret:
break
# 提取帧特征
frame_keypoints, frame_descriptors = detector.detectAndCompute(frame, None)
# 匹配特征
matches = cv2.FlannBasedMatcher().knnMatch(target_descriptors, frame_descriptors, k=2)
# 筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
# 绘制匹配点
frame_matches = cv2.drawMatches(target_image, target_keypoints, frame, frame_keypoints, good_matches, None)
# 显示帧
cv2.imshow('特征匹配', frame_matches)
# 按任意键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
```
**逻辑分析:**
* `cv2.FeatureDetector_create()`:创建特征检测器。
* `cv2.DescriptorExtractor_create()`:创建描述符提取器。
* `detectAndCompute()`:提取和计算特征点和描述符。
* `cv2.FlannBasedMatcher()`:创建匹配器。
* `knnMatch()`:匹配特征点。
* `drawMatches()`:绘制匹配点。
#### 2.2.2 跟踪算法
特征点匹配后,需要使用跟踪算法来估计目标的位置和大小。常用的跟踪算法包括卡尔曼滤波器和粒子滤波器。
**代码块:**
```python
import cv2
# 初始化卡尔曼滤波器
kalman_filter = cv2.KalmanFilter(4, 2, 0)
# 设置状态转移矩阵
kalman_filter.transitionMatrix = np.array([
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**专栏简介:**
本专栏深入剖析 OpenCV 图像几何变换,从基础到实战,提供全面的指南。它涵盖了旋转、平移、缩放和透视变换等核心变换,揭示了背后的数学和算法原理。此外,专栏还探讨了性能优化、常见问题和解决方案,以及图像几何变换在计算机视觉、工业自动化、医学影像、无人驾驶、虚拟现实和增强现实等领域的广泛应用。通过深入理解和掌握这些技术,读者可以解锁图像变形和处理的强大潜力,为各种应用创造创新解决方案。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Xilinx FPGA与DisplayPort接口:10分钟快速掌握实战技巧
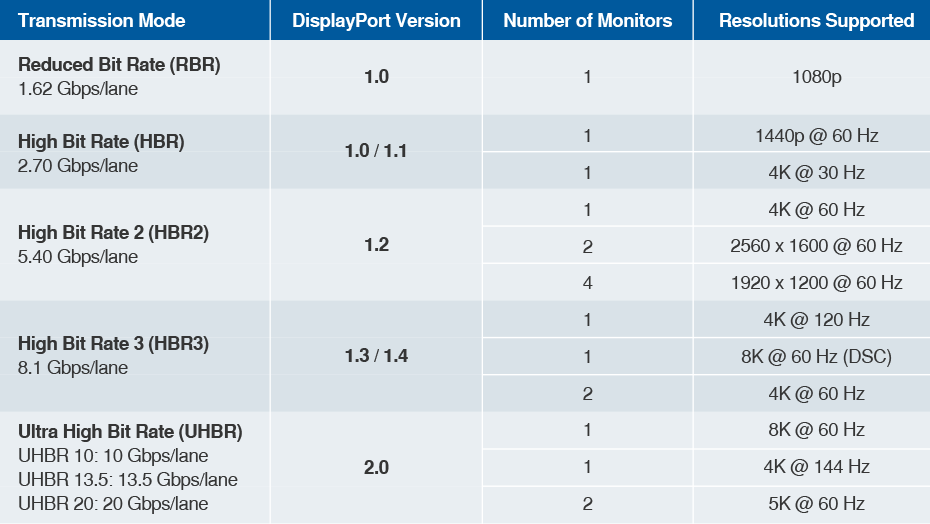
# 摘要
随着数字媒体和高分辨率显示技术的快速发展,Xilinx FPGA与DisplayPort接口的应用变得越来越广泛。本文旨在介绍Xilinx FPGA及其与DisplayPort接口的基础知识、协议详解、开发环境配置、实战技巧以及性能优化与故障排除。通过深入分析DisplayPort协议的演变和信号结构,并结合Xilinx FPGA
【力控组态脚本调试艺术】:提升脚本运行效率与稳定性的专家级技巧

# 摘要
力控组态脚本作为一种重要的工业自动化脚本语言,其稳定性和运行效率直接关系到工业系统的可靠性和性能。本文首先对力控组态脚本的基础知识进行了介绍,然后详细探讨了脚本调试的方法、性能分析工具的应用以及提升脚本效率的策略。此外,本文还阐述了确保脚本稳定性的实践方法,并介绍了力控组态脚本的高级应用,包括第三方工具的集成、跨平台脚本开发及安全性加固。通过综合运用各种优化技术与最佳实践,本文旨在为工业自动化领域中力控组
数据挖掘实操演习:从清洗到模型评估的全流程攻略

# 摘要
数据挖掘作为从大量数据中提取信息和知识的过程,已成为数据分析和机器学习领域的重要组成部分。本文首先介绍了数据挖掘的理论基础和应用场景,强调了数据预处理的重要性,并详细讨论了数据清洗、数据变换和特征工程的关键技巧与方法。随后,本文探讨了分类与回归模型、聚类分析和关联规则学习等数据挖掘模
PyCAD脚本编程:从新手到专家的10个技巧快速掌握

# 摘要
本文系统地探讨了PyCAD脚本编程的基础知识与高级应用,从基础绘图命令到3D建模与渲染技术,再到性能优化与实战演练。文章首先介绍了PyCAD脚本编程的基础和绘图命令的深入解析,包括层和属性的管理以及图形变换与编辑技术。其次,探讨了脚本编程实践中的参数化绘图、自动化任务脚
AI加速器内存挑战:如何通过JESD209-5B实现性能跃升

# 摘要
本文探讨了AI加速器内存技术的现状与挑战,并着重分析了JESD209-5B标准对于AI加速器内存性能的影响及其应用实践。文章首先概述了JESD209-5B标准的背景、技术细节以及对AI加速器的重要意义。随后,文章详细介绍了JESD209-5B标准在硬件实现、软件优化,以及在实际AI系统中的应用案例,并探讨了通过JESD209-
【操作系统设计:磁盘调度的深度探讨】:掌握关键算法,提升设计质量
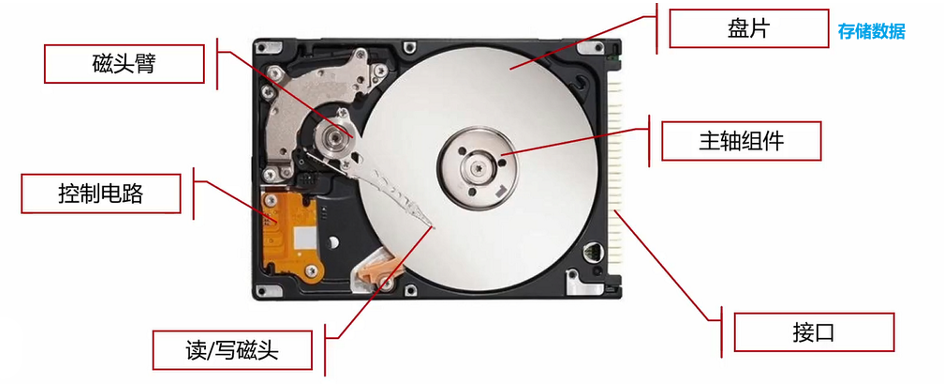
# 摘要
磁盘调度算法是操作系统中用于提高磁盘I/O性能的关键技术。本文首先概述了磁盘调度的基本概念和重要性,随后介绍了几种基础磁盘调度算法(如FCFS、SSTF和SCAN),分析了它们的工作原理、优缺点以及性能评估。接着探讨了高级磁盘调度算法(包括C-SCAN、N-Step-SCAN和电梯算法)的特点和效率。第四章着眼于性能优化,涵盖了评价指标和动态调度策略,以及模拟实验的设计与结果分析。第五章研究了磁盘调度在现代操作系统
【流体动力学基础构建】:为热仿真奠定坚实的理论基础

# 摘要
流体动力学和热仿真作为工程科学中的重要分支,对于理解和预测流体行为及其在热传递过程中的作用至关重要。本文首先介绍了流体动力学的基本概念、原理及其数学描述和分析方法,随后探讨了热传递机制和热仿真的
GSM 11.11版本与物联网:把握新机遇与应对挑战的策略
# 摘要
本文首先概述了GSM 11.11版本的特点及其在物联网技术中的应用潜力,随后深入探讨了物联网的基础知识,包括其定义、组成、技术框架以及应用场景。重点分析了GSM 11.11版本与物联网融合的技术特点和应用实例,同时不忽视了由此产生的技术与市场挑战。此外,本文对物联网的安全问题进行了系统的分析,并提出了相应的安全防护措施和策略。最后,本文展望了物联网的发展趋势、商业前景以及政策环境,旨在为物联网的可持续发展提供洞见和策略支持。
# 关键字
GSM 11.11版本;物联网;技术框架;安全问题;安全防护;发展趋势
参考资源链接:[3GPP TS 11.11:GSM SIM-ME 接口规
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )