STM32单片机C语言编程基础:掌握数据类型、变量和运算符的实用指南
发布时间: 2024-07-02 20:26:33 阅读量: 244 订阅数: 55 
# 1. STM32单片机C语言编程简介
STM32单片机C语言编程是一种基于C语言的嵌入式编程语言,专为STM32单片机设计。它结合了C语言的强大功能和STM32单片机的硬件特性,使开发人员能够创建高效、可靠的嵌入式系统。
C语言是一种结构化、过程化的编程语言,具有广泛的应用。它以其简洁、可移植性和效率而闻名。STM32单片机C语言编程将C语言的这些优点与STM32单片机的强大功能相结合,为嵌入式系统开发提供了理想的平台。
STM32单片机C语言编程涉及使用C语言语法和库函数来控制和操作STM32单片机。开发人员可以使用C语言编写代码来配置外设、处理数据、实现算法并与外部设备通信。通过利用STM32单片机的硬件特性,开发人员可以创建高效、低功耗的嵌入式系统,满足各种应用的需求。
# 2. STM32单片机C语言数据类型和变量
### 2.1 数据类型详解
STM32单片机C语言提供了多种数据类型,用于表示不同类型的数值和数据。这些数据类型包括:
#### 2.1.1 整数类型
整数类型用于表示整数,包括有符号和无符号类型。有符号整数可以表示正数和负数,而无符号整数只能表示正数。STM32单片机C语言支持以下整数类型:
- `char`:8位有符号整数
- `short`:16位有符号整数
- `int`:32位有符号整数
- `long`:32位有符号整数(在某些编译器中为64位)
- `long long`:64位有符号整数
- `unsigned char`:8位无符号整数
- `unsigned short`:16位无符号整数
- `unsigned int`:32位无符号整数
- `unsigned long`:32位无符号整数(在某些编译器中为64位)
- `unsigned long long`:64位无符号整数
#### 2.1.2 浮点类型
浮点类型用于表示实数,包括单精度和双精度类型。单精度浮点类型使用32位表示,而双精度浮点类型使用64位表示。STM32单片机C语言支持以下浮点类型:
- `float`:32位单精度浮点类型
- `double`:64位双精度浮点类型
#### 2.1.3 字符类型
字符类型用于表示单个字符。STM32单片机C语言使用`char`类型表示字符。`char`类型通常使用ASCII码表示字符。
### 2.2 变量定义和使用
变量是程序中用于存储数据的命名内存位置。变量必须在使用前进行声明和定义。
#### 2.2.1 变量的声明和赋值
变量的声明指定了变量的类型和名称。变量的赋值操作将一个值存储到变量中。以下示例声明并赋值了一个名为`x`的整数变量:
```c
int x = 10;
```
#### 2.2.2 变量的存储类型
变量可以存储在不同的内存区域,包括:
- **自动变量:**在函数中声明的变量,在函数调用时分配内存,在函数返回时释放内存。
- **静态变量:**在函数中声明并使用`static`关键字修饰的变量,在程序启动时分配内存,在程序结束时释放内存。
- **全局变量:**在函数外部声明的变量,在程序启动时分配内存,在程序结束时释放内存。
#### 2.2.3 变量作用域
变量的作用域是指变量可以被访问的代码范围。变量的作用域由其声明的位置决定。自动变量的作用域仅限于其声明的函数,而静态变量和全局变量的作用域为整个程序。
# 3.1 算术运算符
算术运算符用于执行算术运算,包括加法、减法、乘法、除法和模运算。
#### 3.1.1 基本算术运算符
| 运算符 | 描述 | 示例 |
|---|---|---|
| + | 加法 | a + b |
| - | 减法 | a - b |
| * | 乘法 | a * b |
| / | 除法 | a / b |
| % | 模运算 | a % b |
**代码块:**
```c
int a = 10, b = 5;
int sum = a + b; // sum = 15
int diff = a - b; // diff = 5
int product = a * b; // product = 50
int quotient = a / b; // quotient = 2
int remainder = a % b; // remainder = 0
```
**逻辑分析:**
* `a + b` 计算 `a` 和 `b` 的和,结果存储在 `sum` 中。
* `a - b` 计算 `a` 和 `b` 的差,结果存储在 `diff` 中。
* `a * b` 计算 `a` 和 `b` 的积,结果存储在 `product` 中。
* `a / b` 计算 `a` 除以 `b` 的商,结果存储在 `quotient` 中。
* `a % b` 计算 `a` 除以 `b` 的余数,结果存储在 `remainder` 中。
#### 3.1.2 赋值运算符
赋值运算符用于将值分配给变量。
| 运算符 | 描述 | 示例 |
|---|---|---|
| = | 赋值 | a = b |
| += | 加法赋值 | a += b |
| -= | 减法赋值 | a -= b |
| *= | 乘法赋值 | a *= b |
| /= | 除法赋值 | a /= b |
| %= | 模赋值 | a %= b |
**代码块:**
```c
int a = 10;
a += 5; // a = 15
a -= 3; // a = 12
a *= 2; // a = 24
a /= 4; // a = 6
a %= 3; // a = 0
```
**逻辑分析:**
* `a += 5` 等价于 `a = a + 5`,将 5 加到 `a` 上。
* `a -= 3` 等价于 `a = a - 3`,从 `a` 中减去 3。
* `a *= 2` 等价于 `a = a * 2`,将 `a` 乘以 2。
* `a /= 4` 等价于 `a = a / 4`,将 `a` 除以 4。
* `a %= 3` 等价于 `a = a % 3`,将 `a` 除以 3 并取余数。
#### 3.1.3 自增自减运算符
自增自减运算符用于递增或递减变量的值。
| 运算符 | 描述 | 示例 |
|---|---|---|
| ++ | 自增 | a++ |
| -- | 自减 | a-- |
**代码块:**
```c
int a = 10;
a++; // a = 11
a--; // a = 10
```
**逻辑分析:**
* `a++` 将 `a` 的值递增 1。
* `a--` 将 `a` 的值递减 1。
# 4. STM32单片机C语言控制语句
### 4.1 顺序结构
#### 4.1.1 基本顺序结构
基本顺序结构是最简单的控制结构,它按顺序执行语句,没有分支或循环。例如:
```c
int main() {
// 顺序执行的语句
int a = 10;
int b = 20;
int c = a + b;
printf("c = %d\n", c);
return 0;
}
```
#### 4.1.2 分支结构
分支结构用于根据条件执行不同的代码块。最常见的分支结构是`if-else`结构。`if`语句指定一个条件,如果条件为真,则执行`if`块中的语句;如果条件为假,则执行`else`块中的语句。例如:
```c
int main() {
int a = 10;
if (a > 5) {
// a 大于 5 时执行的语句
printf("a 大于 5\n");
} else {
// a 小于或等于 5 时执行的语句
printf("a 小于或等于 5\n");
}
return 0;
}
```
### 4.2 循环结构
循环结构用于重复执行一段代码块。最常见的循环结构是`for`、`while`和`do-while`循环。
#### 4.2.1 for循环
`for`循环使用一个初始化语句、一个条件语句和一个后置语句来控制循环。初始化语句在循环开始前执行一次,条件语句在每次循环开始前执行,后置语句在每次循环结束后执行。例如:
```c
int main() {
int i;
for (i = 0; i < 10; i++) {
// 循环体
printf("i = %d\n", i);
}
return 0;
}
```
#### 4.2.2 while循环
`while`循环使用一个条件语句来控制循环。条件语句在每次循环开始前执行,如果条件为真,则执行循环体;如果条件为假,则退出循环。例如:
```c
int main() {
int i = 0;
while (i < 10) {
// 循环体
printf("i = %d\n", i);
i++;
}
return 0;
}
```
#### 4.2.3 do-while循环
`do-while`循环与`while`循环类似,但它至少执行一次循环体,然后才检查条件。例如:
```c
int main() {
int i = 0;
do {
// 循环体
printf("i = %d\n", i);
i++;
} while (i < 10);
return 0;
}
```
### 4.3 选择结构
选择结构用于根据条件选择执行不同的代码块。最常见的选择结构是`if-else`和`switch-case`结构。
#### 4.3.1 if-else结构
`if-else`结构是分支结构的一种,它根据条件执行不同的代码块。`if`语句指定一个条件,如果条件为真,则执行`if`块中的语句;如果条件为假,则执行`else`块中的语句。例如:
```c
int main() {
int a = 10;
if (a > 5) {
// a 大于 5 时执行的语句
printf("a 大于 5\n");
} else {
// a 小于或等于 5 时执行的语句
printf("a 小于或等于 5\n");
}
return 0;
}
```
#### 4.3.2 switch-case结构
`switch-case`结构也是一种选择结构,它根据一个表达式选择执行不同的代码块。表达式可以是任何整型或枚举类型。`switch`语句指定表达式,`case`语句指定要执行的代码块。例如:
```c
int main() {
int a = 10;
switch (a) {
case 1:
// a 等于 1 时执行的语句
printf("a 等于 1\n");
break;
case 2:
// a 等于 2 时执行的语句
printf("a 等于 2\n");
break;
default:
// a 不等于 1 或 2 时执行的语句
printf("a 不等于 1 或 2\n");
break;
}
return 0;
}
```
# 5. STM32单片机C语言函数和数组
### 5.1 函数基础
#### 5.1.1 函数的定义和调用
函数是将代码组织成可重用模块的一种方法。函数由以下部分组成:
- **函数头:**指定函数的名称、参数和返回值类型。
- **函数体:**包含函数的实际代码。
函数的定义如下:
```c
returnType functionName(parameterList) {
// 函数体
}
```
要调用函数,只需使用其名称和参数:
```c
functionName(arguments);
```
#### 5.1.2 函数的参数传递
函数可以通过参数传递数据。参数在函数头中声明,并在函数调用时传递。
参数可以是以下类型:
- **值传递:**将参数的副本传递给函数。
- **引用传递:**将参数的地址传递给函数,允许函数修改原始数据。
#### 5.1.3 函数的返回值
函数可以通过 `return` 语句返回一个值。返回值的类型在函数头中指定。
如果没有指定返回值类型,则函数将返回 `void`。
### 5.2 数组基础
#### 5.2.1 数组的定义和使用
数组是一种数据结构,用于存储相同类型的一组元素。数组使用索引来访问元素。
数组的定义如下:
```c
dataType arrayName[size];
```
其中:
- `dataType` 是数组元素的数据类型。
- `arrayName` 是数组的名称。
- `size` 是数组的大小(元素数量)。
要访问数组元素,可以使用索引:
```c
arrayName[index];
```
#### 5.2.2 多维数组
多维数组是具有多个维度的数组。例如,一个二维数组可以表示一个表格。
多维数组的定义如下:
```c
dataType arrayName[size1][size2]...[sizeN];
```
其中:
- `size1`, `size2`, ..., `sizeN` 是数组的维度大小。
#### 5.2.3 字符数组
字符数组用于存储字符串。字符串是使用空字符 (`\0`) 结尾的字符序列。
字符数组的定义如下:
```c
char arrayName[size];
```
其中:
- `size` 是字符数组的大小(字符数量,包括空字符)。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏以 STM32 单片机 C 语言为主题,提供了一系列深入且全面的指南。从基础知识,如数据类型和变量,到高级主题,如网络通信和图形界面,该专栏涵盖了 STM32 开发的各个方面。专栏中的文章以循序渐进的方式编写,从概念解释到实际示例,帮助读者从零基础逐步掌握 STM32 C 语言编程。无论是初学者还是经验丰富的开发人员,该专栏都提供了宝贵的见解和实用技巧,帮助读者充分利用 STM32 的功能,开发出高效可靠的嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
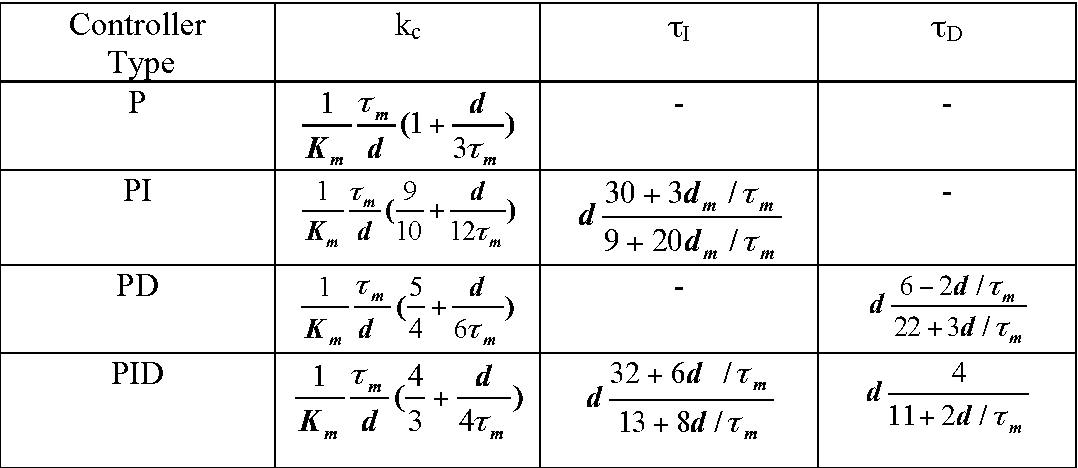
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
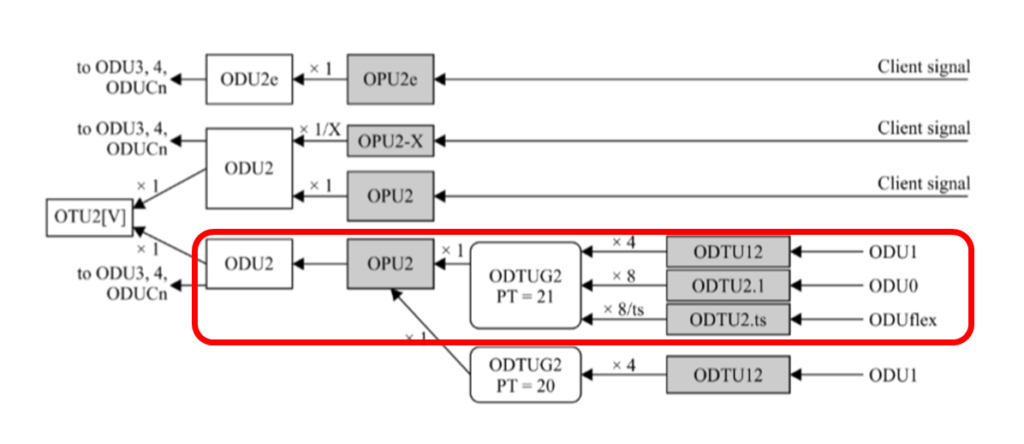
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
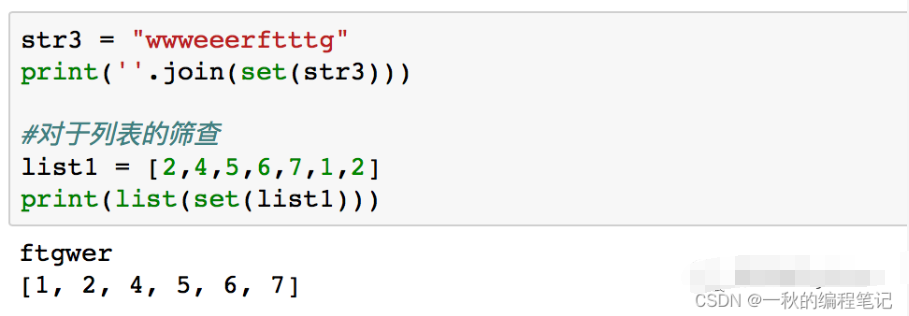
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )