ROS与OpenCV:机器人视觉中的环境感知与建模,助力机器人自主导航
发布时间: 2024-08-09 07:25:48 阅读量: 86 订阅数: 27 
# 1.1 机器人视觉的概念和意义
机器人视觉是赋予机器人“看见”能力的一门技术,旨在让机器人能够感知、理解和解释其周围环境。它通过传感器(如摄像头)获取图像数据,并利用计算机视觉算法处理和分析这些数据,从而提取有用的信息。
机器人视觉在机器人技术中至关重要,因为它使机器人能够:
* **感知环境:**识别物体、障碍物和环境特征。
* **导航:**通过视觉定位和建图,规划和执行自主导航。
* **交互:**与人类和周围环境进行自然交互,例如手势识别和物体抓取。
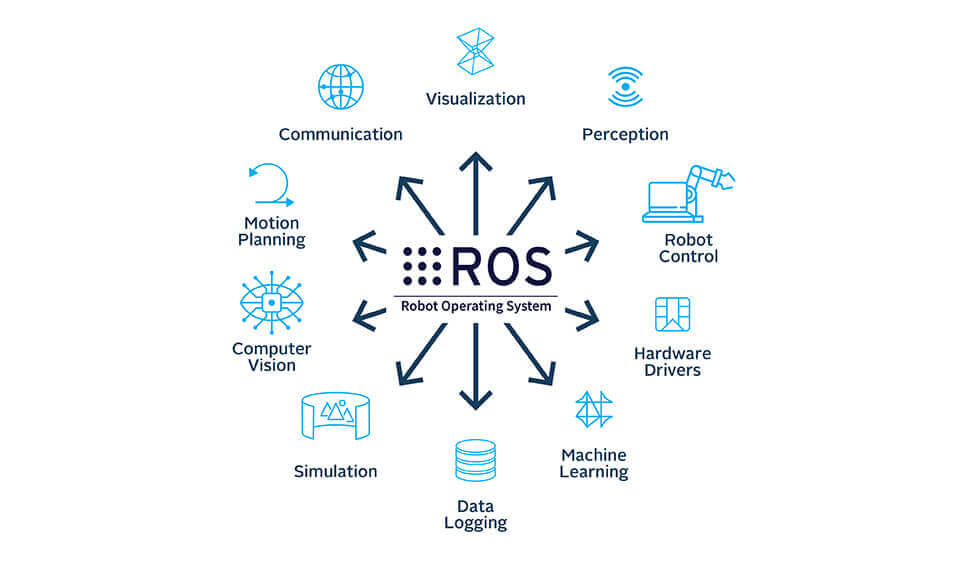
# 2. ROS(机器人操作系统)基础
### 2.1 ROS的概念和架构
机器人操作系统(ROS)是一个开源的、跨平台的框架,用于开发机器人软件。ROS提供了一套工具和库,使开发人员能够轻松地创建、管理和部署机器人应用程序。
ROS采用分布式架构,由以下主要组件组成:
- **节点:**独立的进程,执行特定任务。节点通过消息传递进行通信。
- **话题:**节点之间通信的命名管道。话题可以发布和订阅消息。
- **服务:**请求-响应机制,允许节点请求其他节点执行特定操作。
- **包:**代码和资源的集合,用于构建ROS应用程序。
### 2.2 ROS节点、话题和服务
**节点**
每个ROS应用程序由一个或多个节点组成。节点是独立的进程,执行特定任务,例如传感器数据采集、图像处理或运动控制。节点通过消息传递进行通信。
**话题**
话题是节点之间通信的命名管道。话题可以发布和订阅消息。发布者节点将消息发布到话题,而订阅者节点可以接收这些消息。话题的名称用于标识消息的类型和目的。
**服务**
服务是一种请求-响应机制,允许节点请求其他节点执行特定操作。服务提供者节点提供服务,而服务客户端节点可以调用服务。服务由名称和消息类型标识。
### 2.3 ROS消息类型和数据传输
ROS消息是用于在节点之间传输数据的结构化数据类型。ROS提供了多种内置消息类型,包括:
- **std_msgs/String:**字符串消息
- **sensor_msgs/Image:**图像消息
- **nav_msgs/Odometry:**里程计消息
开发人员还可以创建自己的自定义消息类型。
ROS使用TCP/IP或UDP/IP协议进行消息传输。消息通过名为ROS主机的中央服务器进行路由。ROS主机负责发现和连接节点,并管理消息传输。
### 2.4 ROS包管理和代码重用
ROS包是代码和资源的集合,用于构建ROS应用程序。包通过ROS包管理器(ROS package manager)进行管理。
ROS包管理器允许开发人员轻松地安装、更新和卸载包。包管理器还提供依赖关系管理,确保安装的包具有所需的所有依赖项。
代码重用是ROS的一项重要特性。开发人员可以创建和发布自己的包,供其他开发人员使用。这有助于减少重复工作并促进社区协作。
**代码块:创建ROS节点**
```python
import rospy
# 创建一个ROS节点
rospy.init_node('my_node')
# 创建一个发布者节点
pub = rospy.Publisher('my_topic', String, queue_size=10)
# 创建一个订阅者节点
sub = rospy.Subscriber('my_topic', String, callback)
# 循环执行节点
while not rospy.is_shutdown():
# 发布消息
pub.publish('Hello, ROS!')
# 接收消息
rospy.spin()
```
**逻辑分析:**
此代码块创建了一个ROS节点名为“my_node”。它还创建了一个名为“my_topic”的话题,并使用“String”消息类型进行发布和订阅。节点将循环执行,直到它被关闭(通过调用“rospy.is_shutdown()”)。
# 3. 图像读取、转换和显示
#### 图像读取
OpenCV提供了多种方法来读取图像,最常用的方法是`cv2.imread()`函数。该函数接受图像文件的路径作为参数,并返回一个NumPy数组,其中包含图像数据。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
```
#### 图像转换
OpenCV提供了各种函数来转换图像,包括格式转换、颜色空间转换和大小调整。
**格式转换**
图像格式转换是指将图像从一种格式转换为另一种格式。OpenCV支持多种图像格式,包括JPEG、PNG、BMP和TIFF。
```python
# 将图像转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
```
**颜色空间转换**
颜色空间转换是指将图像从一种颜色空间转换为另一种颜色空间。OpenCV支持多种颜色空间,包括BGR、RGB、HSV和Lab。
```python
# 将图像转换为HSV颜色空间
hsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
```
**大小调整**
图像大小调整是指改变图像的尺寸。OpenCV提供了多种函数来调整图像大小,包括`cv2.resize()`和`cv2.warpAffine()`。
```python
# 将图像缩小一半
resized_image = cv2.resize(image, (0, 0), fx=0.5, fy=0.5)
```
#### 图像显示
OpenCV提供了`cv2.imshow()`函数来显示图像。该函数接受图像作为参数,并创建一个窗口来显示图像。
```python
# 显示图像
cv2.imshow('Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
# 4. ROS与OpenCV集成
### 4.1 ROS中的OpenCV节点和包
ROS中提供了大量的OpenCV节点和包,用于在机器人应用中集成计算机视觉功能。这些节点和包通常遵循ROS的命名约定,以`image_`或`vision_`开头。
**常用的OpenCV节点:**
| 节点名称 | 功能 |
|---|---|
| image_proc | 图像处理,包括图像转换、缩放、裁剪等 |
| camera_info_manager | 管理相机参数和校正信息 |
| stereo_image_proc | 立体视觉图像处理 |
| face_detection | 人脸检测 |
**常用的OpenCV包:**
| 包名称 |

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“ROS与OpenCV”为主题,深入探讨了机器人视觉领域的10大必备技术。专栏内容涵盖从入门到精通的机器人视觉实战指南,涉及图像处理、目标检测、环境感知、SLAM算法、物体识别、图像分割、特征提取、运动估计、图像增强、图像传输、数据集构建、性能优化、故障排除等各个方面。通过深入浅出的讲解和丰富的案例分析,专栏旨在帮助读者掌握机器人视觉的核心技术,打造智能机器人感知系统,赋能机器人与人类自然协作,解锁机器人智能新高度。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【数据同步秘籍】:跨平台EQSL通联卡片操作的最佳实践
# 摘要
本文全面探讨了跨平台EQSL通联卡片同步技术,详细阐述了同步的理论基础、实践操作方法以及面临的问题和解决策略。文章首先介绍了EQSL通联卡片同步的概念,分析了数据结构及其重要性,然后深入探讨了同步机制的理论模型和解决同步冲突的理论。此外,文章还探讨了跨平台数据一致性的保证方法,并通过案例分析详细说明了常见同步场景的解决方案、错误处理以及性能优化。最后,文章预测了未来同步技术的发展趋势,包括新技术的应用前景和同步技术面临的挑战。本文为实现高效、安全的
【DevOps快速指南】:提升软件交付速度的黄金策略
# 摘要
DevOps作为一种将软件开发(Dev)与信息技术运维(Ops)整合的实践方法论,源于对传统软件交付流程的优化需求。本文从DevOps的起源和核心理念出发,详细探讨了其实践基础,包括工具链概览、自动化流程、以及文化与协作的重要性。进一步深入讨论了持续集成(CI)和持续部署(CD)的实践细节,挑战及其解决对策,以及在DevOps实施过程中的高级策略,如安全性强化和云原生应用的容器化。
【行业标杆案例】:ISO_IEC 29147标准下的漏洞披露剖析
# 摘要
本文系统地探讨了ISO/IEC 29147标准在漏洞披露领域的应用及其理论基础,详细分析了漏洞的生命周期、分类分级、披露原则与流程,以及标准框架下的关键要求。通过案例分析,本文深入解析了标准在实际漏洞处理中的应用,并讨论了最佳实践,包括漏洞分析、验证技术、协调披露响应计划和文档编写指南。同时,本文也提出了在现有标准指导下的漏洞披露流程优化策略,以及行业标杆的
智能小车控制系统安全分析与防护:权威揭秘
# 摘要
随着智能小车控制系统的广泛应用,其安全问题日益凸显。本文首先概述了智能小车控制系统的基本架构和功能特点,随后深入分析了该系统的安全隐患,包括硬件和软件的安全威胁、潜在的攻击手段及安全风险评估方法。针对这些风险,文章提出了一整套安全防护措施,涵盖了物理安全、网络安全与通信以及软件与固件的保护策略。此外,本文还讨论了安全测试与
【编程进阶】:探索matplotlib中文显示最佳实践

# 摘要
matplotlib作为一个流行的Python绘图库,其在中文显示方面存在一些挑战,本论文针对这些挑战进行了深入探讨。首先回顾了matplotlib的基础知识和中文显示的基本原理,接着详细分析了中文显示问题的根本原因,包括字体兼容性和字符编码映射。随后,提出了多种解决方案,涵盖了配置方法、第三方库的使用和针对不同操作系统的策略。论文进一步探讨了中
非线性控制算法破解:面对挑战的创新对策
# 摘要
非线性控制算法在现代控制系统中扮演着关键角色,它们的理论基础及其在复杂环境中的应用是当前研究的热点。本文首先探讨了非线性控制系统的理论基础,包括数学模型的复杂性和系统稳定性的判定方法。随后,分析了非线性控制系统面临的挑战,包括高维系统建模、系统不确定性和控制策略的局限性。在理论创新方面,本文提出新型建模方法和自适应控制策略,并通过实践案例分析了这些理论的实际应用。仿
Turbo Debugger与版本控制:6个最佳实践提升集成效率
# 摘要
本文旨在介绍Turbo Debugger及其在版本控制系统中的应用。首先概述了Turbo Debugger的基本功能及其在代码版本追踪中的角色。随后,详细探讨了版本控制的基础知识,包括不同类型的版本控制系统和日常操作。文章进一步深入分析了Turbo Debugger与版本控制集成的最佳实践,包括调试与
流量控制专家:Linux双网卡网关选择与网络优化技巧

# 摘要
本文对Linux双网卡网关的设计与实施进行了全面的探讨,从理论基础到实践操作,再到高级配置和故障排除,详细阐述了双网卡网关的设置过程和优化方法。首先介绍了双网卡网关的概述和理论知识,包括网络流量控制的基础知识和Linux网络栈的工作原理。随后,实践篇详细说明了如何设置和优化双网卡网关,以及在设置过程中应采用的网络优化技巧。深入篇则讨论了高级网络流量控制技术、安全策略和故障诊断与修复方法。最后,通
GrblGru控制器终极入门:数控新手必看的完整指南

# 摘要
GrblGru控制器作为先进的数控系统,在机床操作和自动化领域发挥着重要作用。本文概述了GrblGru控制器的基本理论、编程语言、配置设置、操作实践、故障排除方法以及进阶应用技术。通过对控制器硬件组成、软件功能框架和G代码编程语言的深入分析,文章详细介绍了控制器的操作流程、故障诊断以及维护技巧。此外,通过具体的项目案例分析,如木工作品和金属雕刻等,本文进一步展示了GrblGr
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )