强化学习中的探索与利用策略
发布时间: 2024-04-10 07:43:19 阅读量: 53 订阅数: 72 
# 1. 强化学习基础概念
- 1.1 强化学习简介
- 1.2 强化学习的核心原理
- 1.3 奖励与惩罚机制
### 1.1 强化学习简介
在人工智能领域中,强化学习是一种重要的学习范式,其目标是通过智能系统与环境的交互来学习最优的行为策略。在强化学习中,智能体根据环境的反馈不断调整自己的行为,以获得最大化的累积奖励。
### 1.2 强化学习的核心原理
强化学习的核心原理是基于马尔可夫决策过程(MDP),智能体通过观察环境的状态,采取相应的动作,并根据环境的奖励信号来调整自己的策略。强化学习的目标是找到最优的策略,使得长期累积奖励最大化。
### 1.3 奖励与惩罚机制
在强化学习中,智能体通过与环境的交互获取奖励或惩罚信号,以引导自己学习正确的行为策略。奖励信号通常是在智能体采取某种行为后由环境给出的反馈,智能体的目标是通过最大化累积奖励来学习最优的策略。
# 2. 强化学习算法
### 2.1 Q-learning算法
Q-learning是一种常用的基于值函数的强化学习算法,其核心思想是通过最大化动作价值函数来不断更新策略,从而达到最优策略。下表展示了Q-learning算法的基本步骤:
| 步骤 | 操作 |
|------|--------------------------------------------------------|
| 1 | 初始化Q值表 |
| 2 | 选择动作并执行,观察奖励及下一状态 |
| 3 | 更新Q值表:$Q(s,a) \leftarrow (1-\alpha) \cdot Q(s,a) + \alpha \cdot [r + \gamma \cdot \max_{a'}Q(s',a')]$ |
| 4 | 重复步骤2和步骤3,直至收敛 |
```python
import numpy as np
# 初始化Q值表
Q = np.zeros([num_states, num_actions])
# Q-learning算法
def q_learning(env, num_episodes, alpha, gamma, epsilon):
for _ in range(num_episodes):
state = env.reset()
done = False
while not done:
if np.random.uniform(0, 1) < epsilon:
action = env.action_space.sample()
else:
action = np.argmax(Q[state])
next_state, reward, done, _ = env.step(action)
Q[state, action] = (1 - alpha) * Q[state, action] + alpha * (reward + gamma * np.max(Q[next_state]))
state = next_state
return Q
```
### 2.2 深度强化学习(DRL)
深度强化学习结合了深度学习和强化学习的优势,在处理复杂环境和大规模状态空间时表现出色。DRL常用的算法有深度Q网络(DQN)、双重深度Q网络(DDQN)等,它们通过神经网络逼近动作价值函数。下面是DQN算法的流程图(mermaid格式):
```mermaid
graph TD
A[初始化Q网络和目标网络] --> B[获取初始状态]
B --> C[选择动作(ε-greedy策略)]
C --> D[执行动作,观察奖励和下一状态]
D --> E[存储经验(状态,动作,奖励,下一状态)]
E --> F[从记忆库中抽取数据进行训练]
F --> G[更新Q网络参数]
G --> H[定期更新目标网络参数]
H --> C
```
DRL通过神经网络来学习值函数,能够处理高维状态空间和连续动作空间,适用于诸如视频游戏、自动驾驶等复杂场景中的强化学习任务。
# 3. 探索与开发
### 3.1 探索与利用的平衡
在强化学习中,探索和利用是一个重要的平衡问题。探索指的是尝试未知的行为以发现新的奖励,而利用则是根据已知的最佳策略来获取最大奖励。合理的探索策略可以帮助智能体更好地优化策略,但是过度探索可能会延缓学习进程。
### 3.2 ε-贪婪策略
ε-贪婪策略是一种常用的探索与利用平衡方法。在这种策略中,智能体以ε的概率进行探索,以1-ε的概率进行利用。这样可以在一定程度上保证对未知行为的探索,同时又能最大化长期奖励。
在实际应用中,我们通常通过调节ε的数值来控制探索和利用的比例。下面是一个使用ε-贪婪策略的Python代码示例:
```python
import random
epsilon = 0.1 # ε的取值
q_values = [0.1, 0.5, 0.3, 0.8] # 每个动作的Q值
def epsilon_greedy_action():
if random.random() < epsilon:
return random.randint(0, len(q_values)-1) # 随机选择动作
else:
return q_values.index(max(q_value
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了强化学习,一种机器学习技术,使机器能够通过与环境互动并获得奖励来学习最佳行为。它涵盖了强化学习的基础概念,如马尔科夫决策过程和值函数。还介绍了各种强化学习算法,包括 Q-Learning、深度 Q 网络、策略梯度和蒙特卡洛树搜索。专栏还探讨了强化学习与神经网络的结合,以及在自动驾驶、金融和多智能体系统等领域的应用。此外,它还讨论了强化学习与机器学习之间的差异,以及在不确定性环境下和基于模型的强化学习的算法。通过对这些主题的全面概述,本专栏为读者提供了强化学习的深入理解,及其在现实世界中的广泛应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
西门子V20变频器安装到调试:工业企业必备的5步骤指南

# 摘要
本文详细介绍了西门子V20变频器的基础知识、安装流程、参数配置、调试步骤以及维护与故障排除的方法。首先,概述了变频器的基本概念及其在工业自动化中的重要性。接着,系统地阐述了变频器的安装前准备、实际安装过程、以及安装后的检查与测试方法。文章还深入讲解了参数配置的原理、实践操作和验证优化过程,以及调试过程中可能遇到的问题和故障诊断技巧。最后,讨论了变频器
【PID调节技术深度剖析】:从理论到实战的完整指南
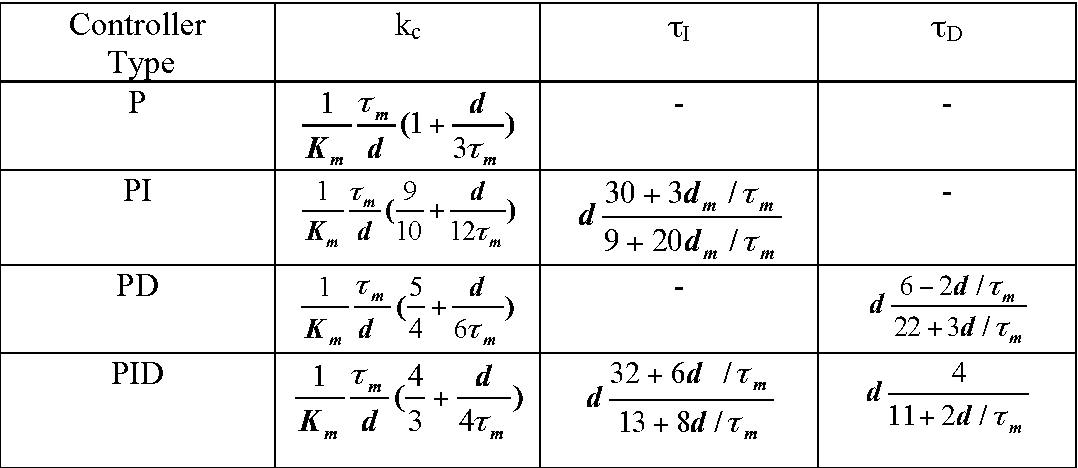
# 摘要
本文全面概述了PID调节技术的理论基础、实践应用以及高级优化策略。首先,介绍了PID控制器的工作原理和误差信号的处理机制。随后,深入分析了PID参数对系统性能的影响,并提供了参数调整的实验方法和案例。文章还探讨了PID控制器的稳定性问题,包括稳定性分析的数学模型和图形方法。在实践应用部分,本文详细论述了PID技术在工业控制、软件系统和自动化系统中的应用实例。最后
【文献管理大师课】:EndNote X7高级定制技巧全解析
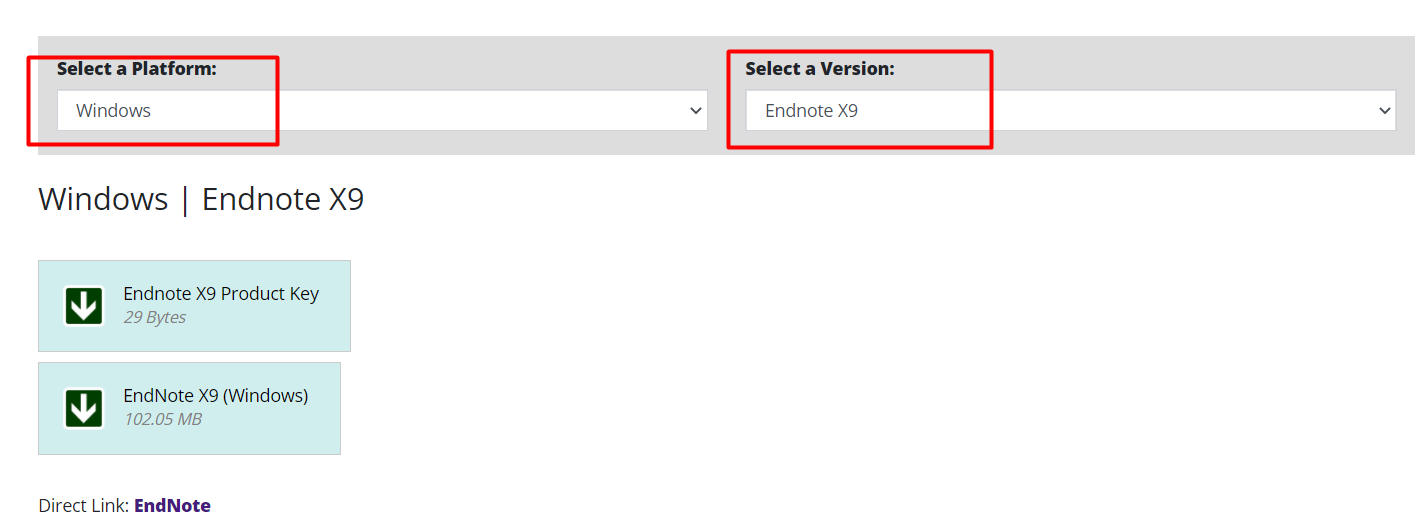
# 摘要
本文旨在全面介绍EndNote X7软件的核心功能和高级应用,涵盖文献管理、格式化引用、协同合作和未来发展趋势。第一章概述了EndNote X7的基本使用和个性化设置方法。第二章深入探讨了高级文献导入与管理技巧,包括文献数据处理、分类系统建立和检索技术提升。第三章详细说明了引用样式的定制与管理,以及如何在不同文档格式中应用这些引用。第四章着重介绍了高级搜索功能和与其他研究工具的集成,以及如何实现高效文献共享和协作。最后一章预测了EndNote
【SCSI技术革新】:如何在现代存储系统中应用SPC-4提升性能

# 摘要
本文系统性地介绍了SCSI技术及其在现代存储系统中的应用,并深入阐述了SPC-4协议的原理、特性、性能指标、兼容性问题以及在存储系统中的实际应用实践。通过分析SPC-4环境的配置和部署步骤,性能优化技巧,以及灾难恢复与数据完整性的保证措施,本文为读者提供了全面的SPC-4实施指南。此外,本文探讨了SPC-4技术与新兴技术的融合前景,行业标准的更新挑战,并通过案例研究,展望了SPC-
【时序逻辑基石】:扭环形计数器设计原理及应用案例(进阶技术全解读)
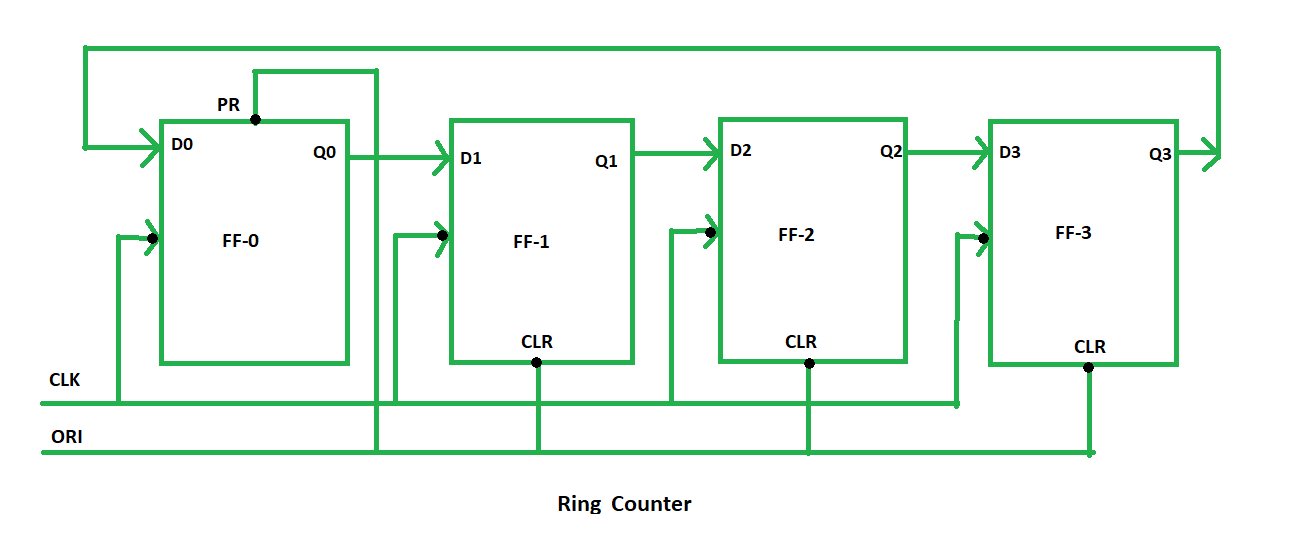
# 摘要
本文系统地介绍了扭环形计数器的设计原理、理论基础、设计实践、应用案例以及面临的未来趋势与挑战。文章首先概述了扭环形计数器的设计原理,随后深入探讨了其理论基础,包括数字电路与计数器的分类、环形计数器的工作机制以及扭环形计数器的设计要点。在此基础上,文中进一步阐释了扭环形计数器的设计过程、仿真测试和硬件实现,同时提供了工业自动化、数字通信系统以及特定领域应用的案例分析。最后,文章展望了扭环形
PUMA560轨迹规划艺术(5):精准高效操作的秘密
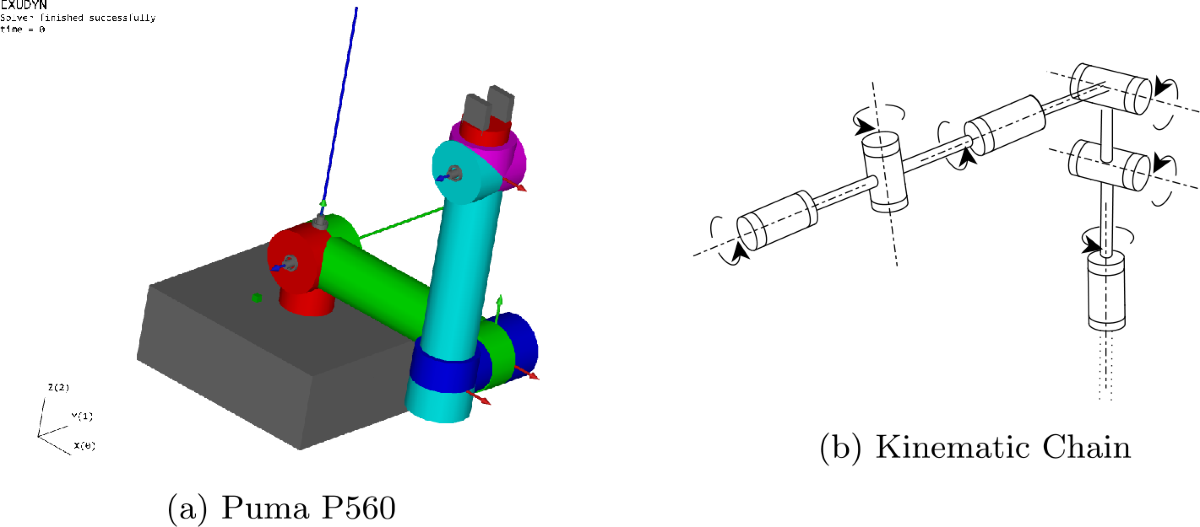
# 摘要
本论文对PUMA560机械臂的轨迹规划进行了全面的研究与分析。首先概述了机械臂的基本情况,随后介绍了轨迹规划的基础理论,包括机械臂运动学原理、轨迹规划的数学模型以及关键性能指标。论文详细探讨了离线和实时轨迹规划算法的设计与实现,并对轨迹优化技术及其应用进行了深入分析
揭秘FAE技术:GC0328手册中的性能提升秘诀及案例研究
# 摘要
FAE技术作为行业的重要组成部分,其性能优化对提升系统效率和稳定性具有关键作用。本文以GC0328为例,首先介绍了性能优化的基础概念、硬件特性及其对性能的影响,接着深入探讨了性能调优策略和监控分析技术。第二部分着重于GC0328在软件优化和硬件配置方面的性能提升实践案例。进一步,文章分析了GC0328的高级技术,包括并行处理、内存管理优化以及高级调试技术。最后,
【数据模型与性能优化】:住院管理数据库的高级架构设计

# 摘要
本文首先概述了住院管理数据库的基本概念与重要性,随后深入探讨了数据模型设计原理,涵盖了理论基础如实体关系模型和数据库规范化理论,同时介绍了高级数据模型技术如对象关系模型和多维数据模型,并探讨了设计实践中的实体识别与属性划分等关键步骤。性能优化的基本策略部
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )