Seq2Seq模型在自动驾驶中的作用与局限:迈向无人驾驶的智能大脑
发布时间: 2024-08-21 03:14:56 阅读量: 18 订阅数: 26 

# 1. Seq2Seq模型概述
Seq2Seq模型是一种深度学习模型,专门用于处理序列数据。它由两个主要组件组成:编码器和解码器。编码器将输入序列转换为一个固定长度的向量,该向量包含输入序列的信息。解码器然后使用该向量生成一个输出序列,该序列通常与输入序列具有不同的长度。
Seq2Seq模型已被广泛应用于各种自然语言处理任务,例如机器翻译、文本摘要和对话生成。它还被用于自动驾驶领域,用于解决轨迹预测、行为决策和环境感知等任务。
# 2. Seq2Seq模型在自动驾驶中的应用
Seq2Seq模型在自动驾驶领域有着广泛的应用,主要体现在以下三个方面:轨迹预测、行为决策和环境感知。
### 2.1 轨迹预测
轨迹预测是自动驾驶系统中一项至关重要的任务,它可以预测其他车辆、行人和其他障碍物的未来运动轨迹,为决策制定提供基础。Seq2Seq模型在轨迹预测中得到了广泛的应用。
#### 2.1.1 基于RNN的轨迹预测
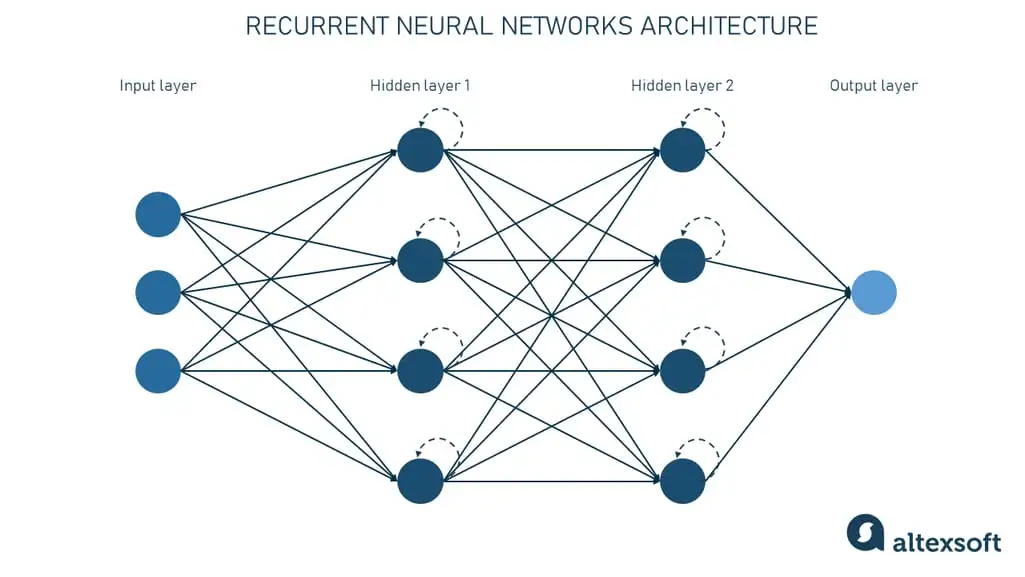
循环神经网络(RNN)是一种强大的时序数据处理模型,它能够捕捉序列中的长期依赖关系。基于RNN的轨迹预测模型通常采用编码器-解码器结构,编码器将输入序列(例如,车辆的位置和速度)编码为一个固定长度的向量,解码器再将该向量解码为输出序列(例如,车辆的未来轨迹)。
**代码块:**
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class RNNTrajectoryPredictor(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(RNNTrajectoryPredictor, self).__init__()
self.rnn = nn.RNN(input_size, hidden_size, batch_first=True)
self.fc = nn.Linear(hidden_size, output_size)
def forward(self, x):
x, _ = self.rnn(x)
x = self.fc(x)
return x
```
**逻辑分析:**
该代码块定义了一个基于RNN的轨迹预测模型。编码器是一个单层RNN,将输入序列编码为一个固定长度的向量。解码器是一个全连接层,将编码后的向量解码为输出序列。
**参数说明:**
* `input_size`: 输入序列的维度
* `hidden_size`: RNN的隐藏状态维度
* `output_size`: 输出序列的维度
#### 2.1.2 基于Transformer的轨迹预测
Transformer模型是一种基于注意力机制的序列到序列模型,它能够捕捉序列中的全局依赖关系。基于Transformer的轨迹预测模型通常采用编码器-解码器结构,编码器将输入序列编码为一个序列表示,解码器再将该表示解码为输出序列。
**代码块:**
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class TransformerTrajectoryPredictor(nn.Module):
def __init__(self, input_size, hidden_size, output_size, num_layers=6, num_heads=8):
super(TransformerTrajectoryPredictor, self).__init__()
self.encoder = nn.TransformerEncoder(nn.TransformerEncoderLayer(d_model=hidden_size, nhead=num_heads), num_layers=num_layers)
self.decoder = nn.TransformerDecoder(nn.TransformerDecoderLayer(d_model=hidden_size, nhead=num_heads), num_layers=num_layers)
self.fc = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = self.encoder(x)
x = self.decoder(x)
x = self.fc(x)
return x
```
**逻辑分析:**
该代码块定义了一个基于Transformer的轨迹预测模型。编码器是一个多层Transformer编码器,将输入序列编码为一个序列表示。解码器是一个多层Transformer解码器,将编码后的表示解码为输出序列。
**参数说明:**
* `input_size`: 输入序列的维度
* `hidden_size`: Transformer模型的隐藏状态维度
* `output_size`: 输出序列的维度
* `num_layers`: Transformer编码器和解码器的层数
* `num_heads`: Transformer编码器和解码器中注意力头的数量
### 2.2 行为决策
行为决策是自动驾驶系统中另一项至关重要的任务,它可以根据当前的环境和车辆状态,决定车辆的下一步动作。Seq2Seq模型在行为决策中得到了广泛的应用。
#### 2.2.1 基于强化学习的行为决策
强化学习是一种无模型的学习方法,它通过与环境的交互来学习最优的行为策略。基于强化学习的行为决策模型通常采用actor-critic结构,actor网络输出动作,critic网络评估动作的价值。
**代码块:**
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class ActorCriticNetwork(nn.Module):
def __init__(self, state_size, action_size):
super(ActorCriticNetwork, self).__init__()
self.actor = nn.Linear(state_size, action_size)
self.critic = nn.Linear(state_size, 1)
def forward(self, x):
actor_output = self.actor(x)
critic_output = self.critic(x)
return actor_output, critic_output
```
**逻辑分析:**
该代码块定义了一个基于强化学习的行为决策模型。actor网络是一个全连接层,输出动作。critic网络是一个全连接层,评估动作的价值。
**参数说明:**
* `state_size`: 输入状态的维度
* `action_size`: 输出动作的维度
#### 2.2.2 基于规划的行为决策
规划是一种基于模型的决策方法,它通过构建环境模型来搜索最优的行为序列。基于规划的行为决策模型通常采用模型预测控制(MPC)算法,该算法通过预测未来状态和动作,来优化当前动作。
**代码块:**
```python
import numpy as np
import scipy.optimize
def MPC(state, model, horizon, action_space):
def objective(actions):
cost = 0
for i in range(horizon):
state = model.predict(state, actions[i])
cost += state.cost()
return cost
actions = scip
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了序列到序列(Seq2Seq)模型在自然语言处理(NLP)任务中的广泛应用。从机器翻译和文本摘要到聊天机器人和语音识别,Seq2Seq模型已成为NLP领域的基石。专栏涵盖了Seq2Seq模型的原理、应用和技巧,并探讨了其在情感分析、文本生成、推荐系统和搜索引擎等领域的潜力。此外,专栏还深入研究了Seq2Seq模型的变种和发展趋势,以及其在金融、电商、自动驾驶和机器人控制等领域的探索和局限。通过深入的分析和案例研究,本专栏为读者提供了对Seq2Seq模型的全面理解,展示了其在推动NLP领域创新和解决现实世界问题方面的强大功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
市场营销的未来:随机森林助力客户细分与需求精准预测

# 1. 市场营销的演变与未来趋势
市场营销作为推动产品和服务销售的关键驱动力,其演变历程与技术进步紧密相连。从早期的单向传播,到互联网时代的双向互动,再到如今的个性化和智能化营销,市场营销的每一次革新都伴随着工具、平台和算法的进化。
## 1.1 市场营销的历史沿
决策树在金融风险评估中的高效应用:机器学习的未来趋势
# 1. 决策树算法概述与金融风险评估
## 决策树算法概述
决策树是一种被广泛应用于分类和回归任务的预测模型。它通过一系列规则对数据进行分割,以达到最终的预测目标。算法结构上类似流程图,从根节点开始,通过每个内部节点的测试,分支到不
支持向量机在语音识别中的应用:挑战与机遇并存的研究前沿

# 1. 支持向量机(SVM)基础
支持向量机(SVM)是一种广泛用于分类和回归分析的监督学习算法,尤其在解决非线性问题上表现出色。SVM通过寻找最优超平面将不同类别的数据有效分开,其核心在于最大化不同类别之间的间隔(即“间隔最大化”)。这种策略不仅减少了模型的泛化误差,还提高了模型对未知数据的预测能力。SVM的另一个重要概念是核函数,通过核函数可以将低维空间线性不可分的数据映射到高维空间,使得原本难以处理的问题变得易于
K-近邻算法多标签分类:专家解析难点与解决策略!

# 1. K-近邻算法概述
K-近邻算法(K-Nearest Neighbors, KNN)是一种基本的分类与回归方法。本章将介绍KNN算法的基本概念、工作原理以及它在机器学习领域中的应用。
## 1.1 算法原理
KNN算法的核心思想非常简单。在分类问题中,它根据最近的K个邻居的数据类别来进行判断,即“多数投票原则”。在回归问题中,则通过计算K个邻居的平均
从GANs到CGANs:条件生成对抗网络的原理与应用全面解析
.jpg)
# 1. 生成对抗网络(GANs)基础
生成对抗网络(GANs)是深度学习领域中的一项突破性技术,由Ian Goodfellow在2014年提出。它由两个模型组成:生成器(Generator)和判别器(Discriminator),通过相互竞争来提升性能。生成器负责创造出逼真的数据样本,判别器则尝试区分真实数据和生成的数据。
## 1.1 GANs的工作原理
LSTM在语音识别中的应用突破:创新与技术趋势

# 1. LSTM技术概述
长短期记忆网络(LSTM)是一种特殊的循环神经网络(RNN),它能够学习长期依赖信息。不同于标准的RNN结构,LSTM引入了复杂的“门”结构来控制信息的流动,这允许网络有效地“记住”和“遗忘”信息,解决了传统RNN面临的长期依赖问题。
## 1
细粒度图像分类挑战:CNN的最新研究动态与实践案例

# 1. 细粒度图像分类的概念与重要性
随着深度学习技术的快速发展,细粒度图像分类在计算机视觉领域扮演着越来越重要的角色。细粒度图像分类,是指对具有细微差异的图像进行准确分类的技术。这类问题在现实世界中无处不在,比如对不同种类的鸟、植物、车辆等进行识别。这种技术的应用不仅提升了图像处理的精度,也为生物多样性
XGBoost时间序列分析:预测模型构建与案例剖析
# 1. 时间序列分析与预测模型概述
在当今数据驱动的世界中,时间序列分析成为了一个重要领域,它通过分析数据点随时间变化的模式来预测未来的趋势。时间序列预测模型作为其中的核心部分,因其在市场预测、需求计划和风险管理等领域的广泛应用而显得尤为重要。本章将简单介绍时间序列分析与预测模型的基础知识,包括其定义、重要性及基本工作流程,为读者理解后续章节内容打下坚实基础。
# 2. XGB
RNN可视化工具:揭秘内部工作机制的全新视角
# 1. RNN可视化工具简介
在本章中,我们将初步探索循环神经网络(RNN)可视化工具的核心概念以及它们在机器学习领域中的重要性。可视化工具通过将复杂的数据和算法流程转化为直观的图表或动画,使得研究者和开发者能够更容易理解模型内部的工作机制,从而对模型进行调整、优化以及故障排除。
## 1.1 RNN可视化的目的和重要性
可视化作为数据科学中的一种强
神经网络硬件加速秘技:GPU与TPU的最佳实践与优化

# 1. 神经网络硬件加速概述
## 1.1 硬件加速背景
随着深度学习技术的快速发展,神经网络模型变得越来越复杂,计算需求显著增长。传统的通用CPU已经难以满足大规模神经网络的计算需求,这促使了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )