【CAPL脚本进阶秘籍】:30天掌握整车CAN消息模拟与处理
发布时间: 2024-12-22 16:01:48 阅读量: 5 订阅数: 6 

CAPL 脚本模拟整车环境实现CAN 收发监控

# 摘要
CAPL (CAN Access Programming Language) 是一种专门用于CAN网络编程的语言,常用于汽车电子测试和模拟。本文旨在为初学者提供CAPL脚本的入门知识,并深入探讨其语法结构、控制结构和函数使用。同时,文章详细说明了CAPL脚本在模拟和处理CAN消息中的实际应用,包括消息的发送、过滤、优先级设置及错误处理。此外,本文还包含实战演练和案例分析部分,以帮助读者通过实际操作加深理解并提升问题解决能力。通过对CAPL脚本的全面介绍和实际案例应用,本文旨在帮助工程师更有效地利用CAPL进行汽车电子控制系统和网络的开发与测试。
# 关键字
CAPL脚本;CAN消息模拟;语法结构;错误处理;消息过滤;网络调试
参考资源链接:[CAPL脚本模拟整车环境:CAN收发监控与故障检测](https://wenku.csdn.net/doc/6412b737be7fbd1778d4980f?spm=1055.2635.3001.10343)
# 1. CAPL脚本入门和基础应用
## CAPL脚本简介
CAPL(CAN Access Programming Language)是一种专门用于Vector CANoe和CANalyzer工具的高级脚本语言,用于模拟CAN网络中的ECUs、处理CAN消息以及测试CAN网络。它支持创建复杂的测试场景,适用于汽车电子、嵌入式系统和网络通信的开发和测试环节。
## CAPL脚本基本结构
CAPL脚本的基本结构包括变量声明、函数定义、事件处理函数等。事件处理函数用于响应CAN消息、计时器以及用户操作等。一个简单的CAPL脚本示例如下:
```capl
variables
{
// 变量声明
int count = 0;
}
on message myMessage
{
// 每收到myMessage消息,count计数加1
count++;
// 输出计数值
write("Received message, count = %d", count);
}
start
{
// 脚本启动时执行的代码
setTimer("myTimer", 1000);
}
on timer myTimer
{
// 每隔1000ms触发一次
write("Timer triggered!");
setTimer("myTimer", 1000);
}
```
## 开始编写CAPL脚本
编写CAPL脚本首先需要了解Vector软件的CAPL编辑器环境,熟悉事件驱动模型和消息传递机制。使用CAPL脚本进行开发时,以下步骤通常是必须的:
1. 定义需要使用的变量和数据结构。
2. 编写消息处理函数,用于接收和发送CAN消息。
3. 利用计时器和用户操作事件,添加更多的交互逻辑。
4. 调试脚本,确保所有功能按预期工作。
CAPL脚本是一种强大的工具,可以用来模拟、监控以及测试CAN总线通信,入门虽易,但要掌握其高级应用则需要更多的实践和经验积累。
# 2. 深入解析CAPL脚本的语法结构
CAPL脚本是一种专门为CAN通讯设计的编程语言,广泛应用于车辆网络通讯模拟和测试。为了有效使用CAPL脚本,深入了解其语法结构是必不可少的。本章将从变量和数据类型的使用,控制结构和函数的应用,到调试和错误处理的高级技巧,全面展开解析CAPL脚本的核心语法。
## 2.1 变量和数据类型在CAPL脚本中的应用
### 2.1.1 变量的声明和初始化
CAPL脚本支持多种数据类型,包括基本数据类型以及结构体和消息类型等复合数据类型。变量的声明遵循典型的C语言风格:
```capl
int myInt; // 声明整型变量
float myFloat; // 声明浮点型变量
string myString = "CAPL"; // 声明字符串变量并初始化
```
初始化可以在声明的同时进行,也可以在程序的任何其他位置进行。需要注意的是,在消息处理函数中初始化消息变量是非常常见的做法:
```capl
on message MyMessage
{
MyMessage msg; // 在消息处理函数中声明并初始化消息对象
msg.byte1 = 0xFF; // 给消息对象的特定成员赋值
}
```
### 2.1.2 数据类型的转换和使用
在CAPL脚本中,数据类型转换的规则与C语言类似。当不同数据类型间的赋值或操作发生时,CAPL会根据内置的规则自动进行类型转换。如果需要手动转换,可以使用如下的类型转换函数:
```capl
int myInt = 10;
float myFloat = (float)myInt; // 手动转换int到float类型
```
类型转换在进行数学运算或在处理不同类型的消息字段时尤为有用。以下是一个利用类型转换调整消息ID的示例:
```capl
on message ExtendedMessage
{
ExtendedMessage msg;
msg.extendedId = 0x12345678; // 假设为32位扩展消息ID
// 获取ID的前8位
byte highByte = (byte)((msg.extendedId & 0xFF000000) >> 24);
// 进行某些操作...
}
```
## 2.2 CAPL脚本的控制结构和函数
### 2.2.1 条件语句和循环语句的使用
CAPL脚本中的条件语句和循环语句遵循标准的C语言结构。例如,使用`if...else`语句进行条件判断:
```capl
if (myInt == 10)
{
// 执行相应的操作...
}
else if (myInt < 10)
{
// 其他操作...
}
else
{
// 其他情况...
}
```
在CAPL中,可以使用`do...while`、`for`和`while`进行循环:
```capl
for (int i = 0; i < 10; i++)
{
// 循环体,执行10次...
}
```
### 2.2.2 自定义函数的编写和调用
CAPL脚本允许开发者定义自己的函数来封装代码逻辑,提高代码的复用性。自定义函数遵循C语言的函数声明和定义方式:
```capl
int Add(int a, int b)
{
return a + b; // 返回两个整数的和
}
// 在其他地方调用函数
int sum = Add(5, 3); // sum的值为8
```
编写函数时,要特别注意参数的传递方式和函数的返回类型,确保数据的正确流转和逻辑的准确性。
## 2.3 CAPL脚本的调试和错误处理
### 2.3.1 常见错误和解决方法
在编写CAPL脚本时,常会遇到的错误类型包括语法错误、运行时错误和逻辑错误。CAPL提供断点、日志和监控工具辅助开发者调试。
- **语法错误**:通常编译器会在编译阶段指出。常见的语法错误包括缺少分号、括号不匹配等。
- **运行时错误**:可能由于消息回调函数中的逻辑错误、资源不足等问题导致。运行时错误通常会在程序运行时通过日志输出错误信息。
- **逻辑错误**:这种错误不容易被发现,可能会导致程序行为与预期不符。解决逻辑错误通常需要结合断点调试、增加运行时日志记录等方法。
### 2.3.2 断点、日志和监控的高级使用技巧
CAPL的断点功能允许开发人员在代码的特定位置暂停执行,从而可以检查变量值、内存状态等信息。
```capl
on start
{
setBreakpoint(); // 设置断点
}
```
在调试时,可以通过`writeLog`函数输出调试信息:
```capl
int myValue = 10;
writeLog("当前的myValue值为: %d", myValue);
```
CAPL的监控功能可以实时监控消息、信号等的变化。例如,使用`on monitor`语句监控CAN消息:
```capl
on monitor MyMessage
{
writeLog("接收到消息:ID=%X, byte1=%d, byte2=%d",
this.id, this.byte1, this.byte2);
}
```
以上介绍了CAPL脚本语法结构的核心要素,为深入理解后续章节内容奠定了基础。在实际应用中,编写符合逻辑、高效的CAPL脚本需要对这些语法结构有深刻的理解和实践。随着我们的深入,接下来的章节会展示如何将这些语法应用于更具体的功能实现和场景模拟中。
# 3. CAPL脚本在CAN消息模拟中的应用
## 3.1 模拟CAN消息的基本方法
### 3.1.1 创建和发送CAN消息
CAPL (CAN Access Programming Language) 脚本是Vector公司开发的一种专门用于CAN网络仿真的脚本语言。在进行CAN消息模拟时,CAPL脚本允许开发者创建和发送自定义的CAN消息,模拟ECU (Electronic Control Unit) 发送的信号。这一过程是通过定义消息并利用CAPL提供的函数实现的。
创建和发送CAN消息的过程主要分为以下几个步骤:
1. **定义CAN消息ID和数据长度**:首先需要确定要模拟的CAN消息ID以及消息的数据长度。这是基础信息,用于构造消息内容。
```capl
message 0x123 8 // 定义一个ID为0x123,数据长度为8字节的CAN消息
```
2. **设置消息内容**:接着为消息填充具体的数据内容。数据应按照实际的字节顺序和意义进行设置。
```capl
setmessageid(0x123);
setdatabytes(0, 0x01); // 设置第一个字节为0x01
setdatabytes(1, 0x02); // 设置第二个字节为0x02
// 以此类推,设置其他字节
```
3. **发送消息**:最后,使用发送函数将消息发送出去。可以根据需要定时发送或在特定条件下发送。
```capl
output(msg); // 将msg发送到CAN总线上
```
### 3.1.2 消息过滤和优先级设置
在模拟过程中,可能会遇到需要发送大量不同类型的消息的情况。为了确保特定的消息能够被系统或ECU正确接收和处理,就需要设置过滤规则和优先级。
1. **消息过滤**:通过过滤可以指定哪些消息应当被接收。这通常在接收消息时进行设置。
```capl
messagefilter(0x123, 0xFF); // 接收ID为0x123的所有消息
```
2. **优先级设置**:在多个节点同时发送消息时,CAN总线协议规定具有更低消息ID的节点拥有更高的传输优先级。因此,根据业务需求设置消息ID可间接控制消息的优先级。
```capl
message 0x123 8; // 通过设置消息ID为0x123,提供更高的优先级
```
通过上述方法,开发者能够有效地在CAPL脚本环境中模拟CAN通信,进行数据交换和测试。这样不仅提高了测试的灵活性,还大幅度降低了物理测试设备的需求。
## 3.2 复杂场景下CAN消息的模拟
### 3.2.1 多节点消息模拟技术
在汽车电子系统中,多个ECU节点之间通过CAN网络进行通信,共同完成车辆的控制和状态监测任务。CAPL脚本能够模拟多个ECU节点,通过编写不同的脚本实例实现多节点消息模拟技术。
1. **创建多个脚本实例**:每个脚本实例代表一个ECU节点,拥有独立的数据空间和消息发送通道。
```capl
// 实例1: 模拟发动机ECU
on start {
setchannel(0); // 设置此脚本实例使用通道0
}
// 实例2: 模拟仪表ECU
on start {
setchannel(1); // 设置此脚本实例使用通道1
}
```
2. **设计节点间的消息交互逻辑**:根据实际的业务逻辑设计节点间的消息交互顺序和内容。
```capl
// 发动机ECU向仪表ECU发送转速信息
message 0x123 2;
setdatabytes(0, speed & 0xFF);
setdatabytes(1, (speed >> 8) & 0xFF);
output(msg);
// 仪表ECU接收转速信息并处理
on message(0x123, msg) {
// 处理接收到的转速信息
}
```
### 3.2.2 基于时间触发的消息模拟
在复杂场景下,为了模拟更真实的车辆运行情况,CAPL脚本还可以通过时间触发方式来发送消息。这样可以模拟定时发送或周期性发送消息的ECU节点。
1. **时间触发消息发送**:通过定时器(`setTimer` 和 `timer`)来实现定时发送消息。
```capl
setTimer(myTimer, 500); // 设置定时器,每500ms触发一次
on timer(myTimer) {
setchannel(0); // 切换到通道0
message 0x123 2;
// 更新消息数据内容
output(msg);
}
```
2. **模拟异常情况下的消息发送**:除了周期性消息外,CAPL脚本还可以模拟故障消息、警告消息等异常情况下的消息发送。
```capl
on start {
setTimer(myErrorTimer, 10000); // 10秒后模拟故障消息
}
on timer(myErrorTimer) {
setchannel(0);
message 0x124 2; // 故障消息ID
// 故障数据设置
output(msg);
}
```
通过多节点消息模拟技术以及基于时间触发的消息发送方法,CAPL脚本能够提供一种接近现实车辆运行环境的模拟测试场景,有效提高ECU软件开发和测试的质量和效率。
## 3.3 模拟消息的效果评估和优化
### 3.3.1 模拟消息的一致性和准确度评估
评估模拟消息的一致性和准确度是确保测试有效性的关键环节。这通常涉及到以下几个方面:
1. **消息格式一致性**:保证模拟发送的消息格式(如数据位的长度、顺序等)与真实ECU发送的消息格式一致。
```capl
// 检查消息格式是否与预期一致
if (msg.byte(0) == expectedValue) {
// 格式一致,执行后续逻辑
} else {
// 格式不一致,记录错误日志或进行故障处理
}
```
2. **消息内容准确度**:检查消息数据内容是否符合预期,包括数据的范围、离散值等。
```capl
// 检查消息内容是否准确
if (msg.byte(1) >= minValue && msg.byte(1) <= maxValue) {
// 数据在有效范围内,消息准确
} else {
// 数据超出预期范围,记录错误信息
}
```
### 3.3.2 消息模拟性能的优化技巧
消息模拟性能的优化主要包括减少消息处理时间以及提升消息传输效率。优化措施可以是算法层面的改进,也可以是代码层面的调整。
1. **代码层面的优化**:简化消息处理逻辑,减少不必要的数据复制,使用高效的数据结构和算法。
```capl
// 优化前:频繁的字节操作和循环判断
for (int i = 0; i < msg.len; i++) {
if (msg.byte(i) == someValue) {
// 处理逻辑
}
}
// 优化后:利用字节掩码直接进行判断
if (msg.word & someMask) {
// 处理逻辑
}
```
2. **算法层面的优化**:选择适当的排序和搜索算法,针对特定问题设计算法。
```capl
// 使用快速排序替代冒泡排序
function quickSort(msgData[]) {
// 快速排序算法实现
}
```
3. **并行处理消息**:利用CAPL的多线程能力,将不同消息的处理分配到不同线程,提高处理效率。
```capl
// 并行处理消息
thread myThread {
while (isRunning) {
// 独立处理消息
}
}
```
通过以上评估和优化技巧,可以确保消息模拟的质量和效率,使其更贴近实际应用环境,提高软件开发和测试的准确性与可靠性。
# 4. CAPL脚本在CAN消息处理中的应用
## 4.1 接收CAN消息的处理策略
### 4.1.1 消息过滤和接收回调函数的编写
在CAN网络通信中,每个节点都需要具备处理接收到的CAN消息的能力。CAPL脚本提供了一种机制,通过消息过滤和回调函数来实现这一处理策略。消息过滤可以预先定义哪些消息是我们感兴趣的,而回调函数则用于处理这些消息。以下是一个具体的代码实现例子:
```capl
variables
{
// 定义感兴趣的消息ID
message 0x123 MyInterestingMessage;
}
// 接收回调函数的编写
on message MyInterestingMessage
{
// 这里编写处理消息的代码逻辑
output("Message received: %d", this.id);
}
```
### 4.1.2 消息内容的解析和应用
接收到的消息需要根据实际的协议内容进行解析。这涉及到对消息中各个数据字段的理解和使用。CAPL提供了强大的数据访问和处理能力,使得解析变得简单直观。下面的代码段演示了如何访问并解析消息中的特定数据字段:
```capl
on message MyInterestingMessage
{
// 假设消息格式已知,有如下数据字段定义
data MyDataField = this.data[0];
// 解析数据字段并输出结果
if(MyDataField == 0xFF)
{
output("Special case: Data field is 0xFF");
}
else
{
output("Received data field value: %d", MyDataField);
}
}
```
### 4.1.3 消息的进一步应用
解析完毕的消息数据可以用于多种应用,例如进行数据监控、数据统计、生成报警或者驱动测试序列的执行。一个典型的应用例子是将消息数据保存到日志文件中,为后续的分析和调试提供数据支持。
## 4.2 CAN网络错误的检测和处理
### 4.2.1 错误检测机制和报警处理
CAPL脚本能够监控CAN网络上的错误事件,并在发生错误时触发相应的报警处理逻辑。错误事件类型包括消息错误、校验错误、格式错误等。实现错误检测机制的代码示例如下:
```capl
on error
{
// 检测错误类型并输出
switch (lastError)
{
case NO_ERROR:
output("No error detected");
break;
case MESSAGE_ERROR:
output("Message error detected");
break;
case CRC_ERROR:
output("CRC error detected");
break;
// 更多错误类型...
}
}
```
### 4.2.2 网络故障模拟和恢复
为了测试系统的健壮性,CAPL脚本可以用于模拟CAN网络故障。这种模拟对于验证网络故障恢复机制非常有效。下面的代码段展示了如何在脚本中模拟消息传输错误:
```capl
void simulateError()
{
setChannelProperty(0, TRANSMIT_ERROR, 1); // 模拟传输错误
// 延时一段时间后恢复
output("Error simulated, will recover in 5 seconds...");
wait(5);
setChannelProperty(0, TRANSMIT_ERROR, 0); // 恢复正常通信
}
```
## 4.3 高级CAN消息处理场景应用
### 4.3.1 基于消息优先级的处理逻辑
在某些复杂的CAN网络中,消息优先级的概念至关重要。CAPL脚本允许开发者根据优先级来处理消息,保证了高优先级的消息能够得到及时响应。下面的代码段展示了如何根据消息ID来决定处理逻辑:
```capl
on message * // 处理所有接收到的消息
{
if(this.id == 0x123) // 假设ID为0x123的消息优先级最高
{
output("High priority message received");
// 优先处理高优先级消息的逻辑
}
else
{
output("Processing lower priority message");
// 普通消息的处理逻辑
}
}
```
### 4.3.2 状态机在复杂消息处理中的应用
在处理多消息类型的系统中,状态机是一种非常强大的概念。CAPL脚本支持使用状态机来控制消息处理流程,尤其在复杂的网络协议和诊断应用中。下面是一个简单状态机实现的例子:
```capl
variables
{
state StateMachine
{
state INIT
state WAIT_FOR_MSG_A
state PROCESS_MSG_A
state WAIT_FOR_MSG_B
state PROCESS_MSG_B
}
}
on message MyMessageA
{
// 接收到消息A时的处理
setNextState(StateMachine.PROCESS_MSG_A);
}
on message MyMessageB
{
// 接收到消息B时的处理
setNextState(StateMachine.PROCESS_MSG_B);
}
// 状态机的具体逻辑需要根据实际需求编写
```
在以上例子中,我们通过状态机控制了不同消息的处理流程,可以根据实际情况扩展出更多的状态和逻辑分支。
# 5. CAPL脚本的实战演练和案例分析
CAPL脚本是CANoe和CANalyzer中用于模拟和测试CAN总线网络的重要工具。掌握CAPL脚本的实战演练和案例分析,不仅有助于提高汽车电子系统的测试效率,还可以在调试过程中发现潜在问题并提出优化方案。本章节将通过实战演练的方式深入探讨CAPL脚本在真实环境中的应用,并通过案例分析提供问题诊断和解决思路。
## 5.1 常见汽车电子控制单元的模拟
### 5.1.1 发动机控制单元(ECU)模拟
在汽车电子控制系统中,发动机控制单元(ECU)扮演着核心角色。使用CAPL脚本模拟ECU不仅能够帮助测试工程师验证硬件功能和软件算法,还能为新软件的开发和测试提供平台。
```capl
variables
{
message 123 0x123; // 定义一个CAN消息,ID为0x123
}
on start
{
output("ECU Simulation Started...\n");
setTimer(Timer1, 100); // 设置定时器,每100毫秒触发一次
}
on timer Timer1
{
output("Simulating Engine Speed Update\n");
message123.data.byte(0) = 0xFF; // 假设发动机转速为0xFF
output(message123);
setTimer(Timer1, 100); // 每100毫秒更新一次发动机转速
}
```
### 5.1.2 车辆动态控制系统模拟
车辆动态控制系统,如防抱死制动系统(ABS)、电子稳定性控制(ESC)等,对车辆安全性至关重要。通过CAPL脚本模拟这些系统可以帮助测试人员在车辆未组装完成之前就对系统进行测试。
```capl
variables
{
message ABSMsg 0x400; // 定义一个CAN消息,ID为0x400,用于ABS系统
}
// 定义一个模拟ABS状态改变的函数
void changeABSSystemStatus(bit status)
{
ABSMsg.data.byte(0) = status ? 0x01 : 0x00;
output(ABSMsg);
}
on start
{
output("Vehicle Dynamics Control System Simulation Started...\n");
}
// 假设每200毫秒ABS系统状态可能会改变一次
on timer Timer2
{
changeABSSystemStatus((random(0,10) >= 5) ? true : false);
setTimer(Timer2, 200);
}
```
## 5.2 全车网络的搭建和调试
### 5.2.1 车辆网络的搭建方法
汽车中常常涉及多个ECU和控制网络,CAPL脚本可以模拟整个车辆网络,并通过创建节点和连接它们来构建一个仿真的车辆网络环境。
```capl
variables
{
node Node1;
node Node2;
channel MyChannel;
}
on start
{
// 定义一个车辆通信通道
MyChannel = new channel("Vehicle Communication Channel");
// 创建两个节点并连接到通道
Node1 = new node("ECU1", MyChannel);
Node2 = new node("ECU2", MyChannel);
output("Vehicle Network Setup Complete\n");
}
// 配置通道和节点的具体设置可以根据实际车辆网络进行调整
```
### 5.2.2 网络调试的策略和技巧
在搭建了车辆网络后,需要对其进行调试,确保消息的正确传递和系统的稳定运行。CAPL脚本提供了强大的调试工具,包括断点、日志记录等。
```capl
on message MyMessage
{
if(MyMessage.data.byte(0) == 0x0A)
{
// 当接收到特定数据时,触发断点或记录日志
output("Message Received: 0x%X\n", MyMessage.id);
setBreakPoint();
}
}
```
## 5.3 真实案例分析和问题解决
### 5.3.1 案例分析:整车CAN通信问题诊断
在整车CAN通信问题诊断中,CAPL脚本能够模拟故障情景,帮助诊断故障点,例如,通过发送错误帧来模拟某些节点的故障。
```capl
variables
{
message ErrorFrame 0x700;
}
on start
{
// 用于生成一个错误帧,模拟通信故障
ErrorFrame.len = 8;
ErrorFrame.id = 0x700;
ErrorFrame.data.byte(0) = 0xFF; // 错误帧的数据可以按照实际需求定义
output("Error Frame Simulation Started...\n");
}
// 每隔一段时间发送一个错误帧模拟故障
on timer Timer3
{
output(ErrorFrame);
setTimer(Timer3, 500);
}
```
### 5.3.2 实战经验:CAPL脚本优化与升级路径
在实际应用中,对CAPL脚本进行优化和升级是提高测试效率的关键。通常包括代码重构、性能分析和功能增强等步骤。
```capl
// 以优化接收消息处理流程为例
// 优化前
on message MyMessage
{
// 原始处理逻辑
}
// 优化后
variables
{
message MyMessage;
}
on message MyMessage
{
// 优化后的处理逻辑,更高效、易读
}
// 优化后的脚本可能包含更少的全局变量、更清晰的逻辑和更少的重复代码
```
通过以上内容,我们了解了CAPL脚本在汽车电子控制单元模拟、车辆网络搭建、故障诊断等方面的实战应用和案例分析。在实践过程中,不断优化和升级CAPL脚本是提升测试效率和质量的重要途径。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 CAPL 脚本在整车环境模拟和 CAN 收发监控中的应用。从基础到进阶,涵盖了 CAN 总线监控、故障注入、消息模拟和处理、数据记录和分析等方面。专栏还提供了优化脚本性能、实现自动化测试和车辆行为模拟的实用指南。通过学习这些内容,读者可以掌握 CAPL 脚本的全面知识,并将其应用于实际的汽车开发和测试场景中。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【SGP.22_v2.0(RSP)中文版深度剖析】:掌握核心特性,引领技术革新
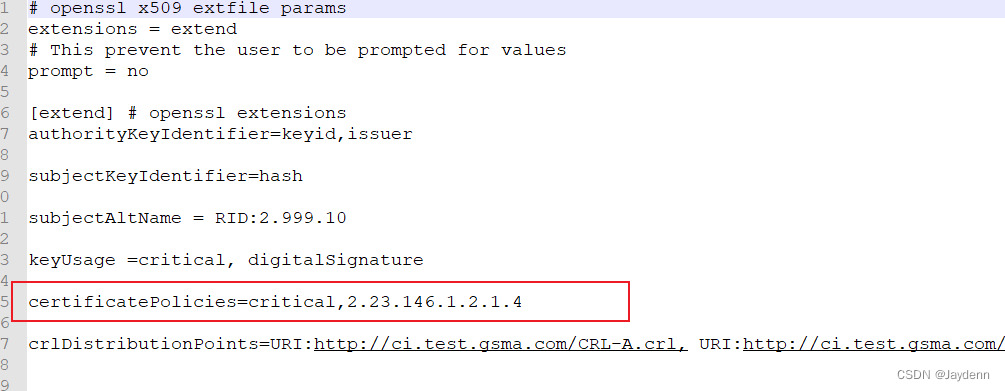
# 摘要
SGP.22_v2.0(RSP)作为一种先进的技术标准,在本论文中得到了全面的探讨和解析。第一章概述了SGP.22_v2.0(RSP)的核心特性,为读者提供了对其功能与应用范围的基本理解。第二章深入分析了其技术架构,包括设计理念、关键组件功能以及核心功能模块的拆解,还着重介绍了创新技术的要点和面临的难点及解决方案。第三章通过案例分析和成功案例分享,展示了SGP.22_v2.0(RSP)在实际场景中的应用效果、
小红书企业号认证与内容营销:如何创造互动与共鸣
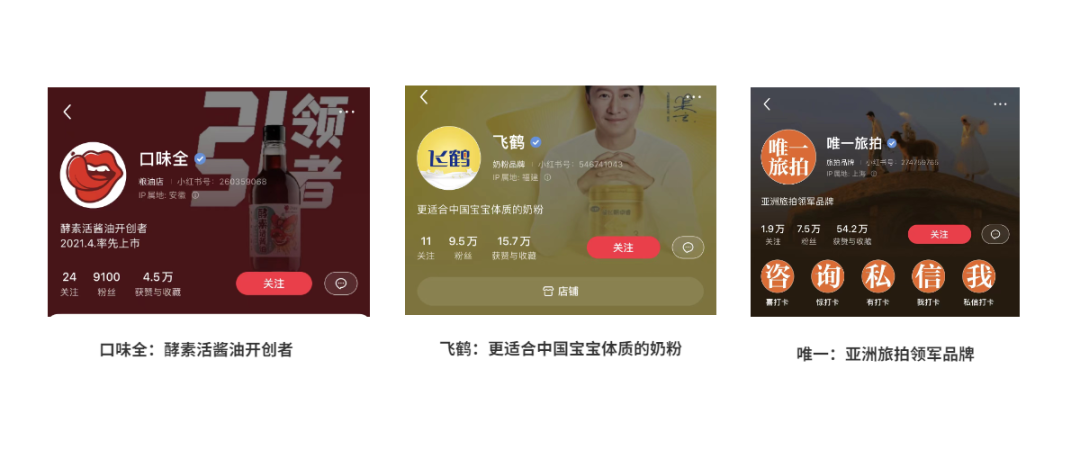
# 摘要
本文详细解析了小红书企业号的认证流程、内容营销理论、高效互动策略的制定与实施、小红书平台特性与内容布局、案例研究与实战技巧,并展望了未来趋势与企业号的持续发展。文章深入探讨了内容营销的重要性、目标受众分析、内容创作与互动策略,以及如何有效利用小红书平台特性进行内容分发和布局。此外,通过案例分析和实战技巧的讨论,本文提供了一系列实战操作方案,助力企业号管理者优化运营效果,增强用户粘性和品牌影响力
【数字电路设计】:优化PRBS生成器性能的4大策略
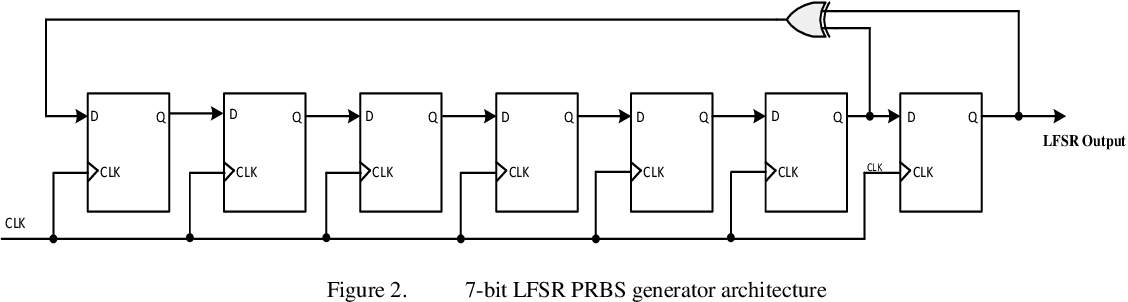
# 摘要
本文全面介绍了数字电路设计中的PRBS生成器原理、性能优化策略以及实际应用案例分析。首先阐述了PRBS生成器的工作原理和关键参数,重点分析了序列长度、反馈多项式、时钟频率等对生成器性能的影响。接着探讨了硬件选择、电路布局、编程算法和时序同步等多种优化方法,并通过实验环境搭建和案例分析,评估了这些策
【从零到专家】:一步步精通图书馆管理系统的UML图绘制
# 摘要
统一建模语言(UML)是软件工程领域广泛使用的建模工具,用于软件系统的设计、分析和文档化。本文旨在系统性地介绍UML图绘制的基础知识和高级应用。通过概述UML图的种类及其用途,文章阐明了UML的核心概念,包括元素与关系、可视化规则与建模。文章进一步深入探讨了用例图、类图和序列图的绘制技巧和在图书馆管理系统中的具体实例。最后,文章涉及活动图、状态图的绘制方法,以及组件图和
【深入理解Vue打印插件】:专家级别的应用和实践技巧
# 摘要
本文深入探讨了Vue打印插件的基础知识、工作原理、应用配置、优化方法、实践技巧以及高级定制开发,旨在为Vue开发者提供全面的打印解决方案。通过解析Vue打印插件内部的工作原理,包括指令和组件解析、打印流程控制机制以及插件架构和API设计,本文揭示了插件在项目
【Origin图表深度解析】:隐藏_显示坐标轴标题与图例的5大秘诀

# 摘要
本文旨在探讨Origin图表中坐标轴标题和图例的设置、隐藏与显示技巧及其重要性。通过分析坐标轴标题和图例的基本功能,本文阐述了它们在提升图表可读性和信息传达规范化中的作用。文章进一步介绍了隐藏与显示坐标轴标题和图例的需求及其实践方法,包括手动操作和编程自动化技术,强调了灵活控制这些元素对于创建清晰、直观图表的重要性。最后,本文展示了如何自定义图表以满足高级需求,并通过
【GC4663与物联网:构建高效IoT解决方案】:探索GC4663在IoT项目中的应用
# 摘要
GC4663作为一款专为物联网设计的芯片,其在物联网系统中的应用与理论基础是本文探讨的重点。首先,本文对物联网的概念、架构及其数据处理与传输机制进行了概述。随后,详细介绍了GC4663的技术规格,以及其在智能设备中的应用和物联网通信与安全机制。通过案例分析,本文探讨了GC4663在智能家居、工业物联网及城市基础设施中的实际应用,并分
Linux系统必备知识:wget命令的深入解析与应用技巧,打造高效下载与管理

# 摘要
本文旨在深入介绍Linux系统中广泛使用的wget命令的基础知识、高级使用技巧、实践应用、进阶技巧与脚本编写,以及在不同场景下的应用案例分析。通过探讨wget命令的下载控制、文件检索、网络安全、代理设置、定时任务、分段下载、远程文件管理等高级功能,文章展示了wget
EPLAN Fluid故障排除秘籍:快速诊断与解决,保证项目顺畅运行
# 摘要
EPLAN Fluid作为一种工程设计软件,广泛应用于流程控制系统的规划和实施。本文旨在提供EPLAN Fluid的基础介绍、常见问题的解决方案、实践案例分析,以及高级故障排除技巧。通过系统性地探讨故障类型、诊断步骤、快速解决策略、项目管理协作以及未来发展趋势,本文帮助读者深入理解EPLAN Fluid的应用,并提升在实际项目中的故障处理能力。
华为SUN2000-(33KTL, 40KTL) MODBUS接口故障排除技巧

# 摘要
本文旨在全面介绍MODBUS协议及其在华为SUN2000逆变器中的应用。首先,概述了MODBUS协议的起源、架构和特点,并详细介绍了其功能码和数据模型。随后,对华为SUN2000逆变器的工作原理、通信接口及与MODBUS接口相关的设置进行了讲解。文章还专门讨论了MODBUS接口故障诊断的方法和工具,以及如
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )