OpenCV行人检测在机器人导航中的避障神器:赋予机器人行人避障能力
发布时间: 2024-08-13 14:42:45 阅读量: 10 订阅数: 11 

# 1. 机器人导航中的避障挑战**
在机器人导航中,避障是一个关键挑战。机器人需要感知周围环境,识别障碍物并规划安全路径以避免碰撞。传统避障方法依赖于传感器数据,如激光雷达和超声波传感器。然而,这些传感器在检测行人等动态障碍物时存在局限性。
行人检测技术可以补充传统避障方法,提供对行人的准确检测。通过集成行人检测,机器人可以提高其避障能力,在复杂和动态的环境中安全导航。
# 2. OpenCV行人检测技术
### 2.1 行人检测算法原理
行人检测算法旨在从图像或视频中识别和定位行人。OpenCV中常用的行人检测算法是基于HOG(直方图梯度)特征的。
HOG特征提取图像中局部区域的梯度方向和幅度信息,并将其转换为直方图。这些直方图被输入到线性支持向量机(SVM)分类器中,该分类器经过训练以区分行人和其他物体。
### 2.2 OpenCV行人检测API详解
OpenCV提供了一个名为`cv2.HOGDescriptor`的API,用于创建HOG描述符。该API接受图像作为输入,并返回HOG特征向量。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 创建HOG描述符
hog = cv2.HOGDescriptor()
# 计算HOG特征
features = hog.compute(image)
```
HOG描述符还可以用于训练行人检测器。OpenCV提供了一个名为`cv2.HOGDescriptor_getDefaultPeopleDetector`的函数,该函数返回一个预先训练好的行人检测器。
```python
import cv2
# 加载预先训练好的行人检测器
detector = cv2.HOGDescriptor_getDefaultPeopleDetector()
# 检测行人
(rects, weights) = detector.detectMultiScale(image, winStride=(4, 4), padding=(8, 8), scale=1.05)
```
`detectMultiScale`函数返回一个矩形列表,其中包含检测到的行人的边界框,以及一个权重列表,其中包含每个边界框的置信度分数。
### 代码逻辑逐行解读分析
**HOG描述符计算代码:**
* `image = cv2.imread('image.jpg')`:加载图像。
* `hog = cv2.HOGDescriptor()`:创建HOG描述符。
* `features = hog.compute(image)`:计算HOG特征。
**行人检测代码:**
* `detector = cv2.HOGDescriptor_getDefaultPeopleDetector()`:加载预先训练好的行人检测器。
* `(rects, weights) = detector.detectMultiScale(image, winStride=(4, 4), padding=(8, 8), scale=1.05)`:检测行人。
**参数说明:**
* `winStride`:检测窗口在图像上移动的步长。
* `padding`:在检测窗口周围添加的填充量。
* `scale`:检测窗口的缩放因子。
# 3. OpenCV行人检测实践
### 3.1 行人检测模型训练
**训练数据集准备**
* 收集大量行人图像和非行人图像,确保数据集具有多样性,包括不同姿势、服装、照明条件和背景。
* 对图像进行预处理,包括调整大小、裁剪和归一化。
**模型选择**
* 选择合适的行人检测算法,如Haar级联分类器、HOG行人检测器或深度学习模型。
* 考虑模型的精度、速度和复杂度。
**模型训练**
* 使用训练数据集训练所选模型。
* 训练过程包括特征提取

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏以“OpenCV行人检测”为主题,系统全面地介绍了OpenCV行人检测的各个方面,从基础算法到性能优化,再到实际应用。它深入剖析了HOG、SVM和Cascade Classifier等关键技术,并提供了优化速度和精度的秘诀。此外,专栏还探讨了OpenCV行人检测在智能交通、目标跟踪、人脸识别、动作识别、医疗保健、零售、安防监控、无人驾驶、机器人导航、虚拟现实、增强现实、游戏开发、体育分析、生物识别、交通流量分析和人群行为分析等领域的广泛应用。通过深入浅出的讲解和丰富的案例,该专栏旨在帮助读者从小白成长为行人检测大师,打造行人检测神器,为各种应用场景提供智能化解决方案。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Python排序与异常处理】:优雅地处理排序过程中的各种异常情况
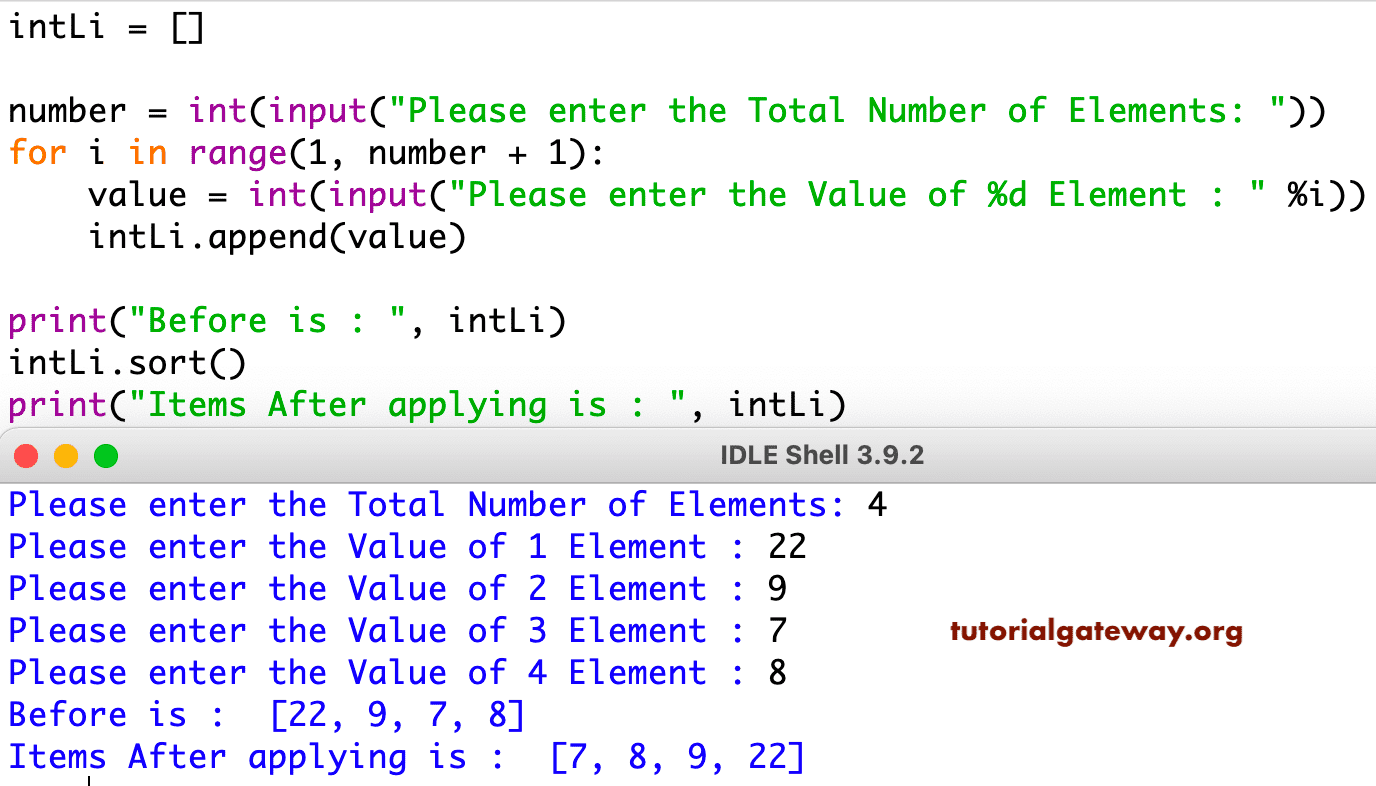
# 1. Python排序算法概述
排序算法是计算机科学中的基础概念之一,无论是在学习还是在实际工作中,都是不可或缺的技能。Python作为一门广泛使用的编程语言,内置了多种排序机制,这些机制在不同的应用场景中发挥着关键作用。本章将为读者提供一个Python排序算法的概览,包括Python内置排序函数的基本使用、排序算法的复杂度分析,以及高级排序技术的探
索引与数据结构选择:如何根据需求选择最佳的Python数据结构
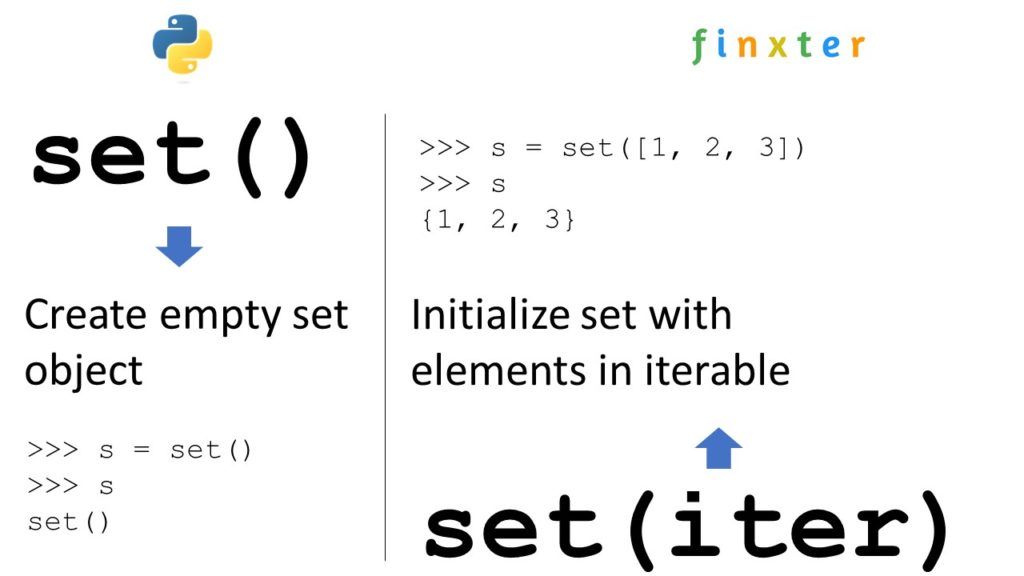
# 1. Python数据结构概述
Python是一种广泛使用的高级编程语言,以其简洁的语法和强大的数据处理能力著称。在进行数据处理、算法设计和软件开发之前,了解Python的核心数据结构是非常必要的。本章将对Python中的数据结构进行一个概览式的介绍,包括基本数据类型、集合类型以及一些高级数据结构。读者通过本章的学习,能够掌握Python数据结构的基本概念,并为进一步深入学习奠
Python并发控制:在多线程环境中避免竞态条件的策略

# 1. Python并发控制的理论基础
在现代软件开发中,处理并发任务已成为设计高效应用程序的关键因素。Python语言因其简洁易读的语法和强大的库支持,在并发编程领域也表现出色。本章节将为读者介绍并发控制的理论基础,为深入理解和应用Python中的并发工具打下坚实的基础。
## 1.1 并发与并行的概念区分
首先,理解并发和并行之间的区别至关重要。并发(Concurre
Python列表的函数式编程之旅:map和filter让代码更优雅
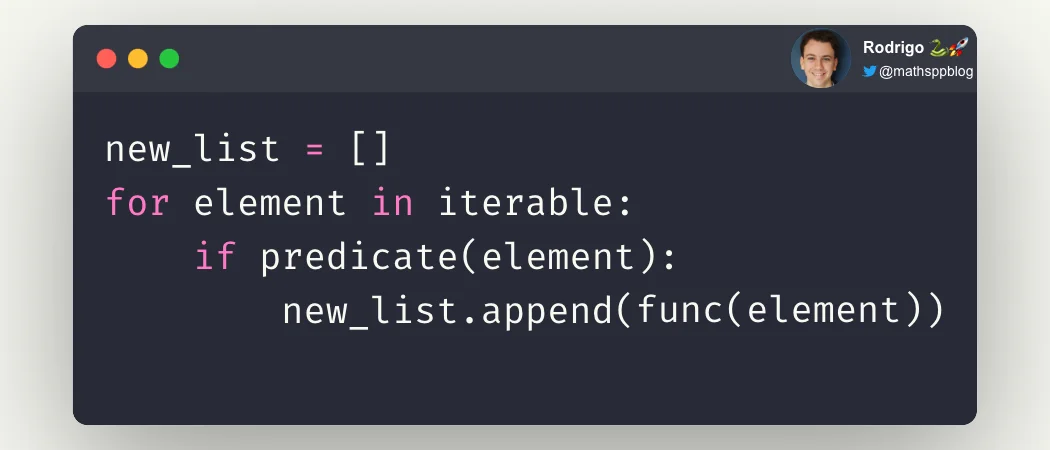
# 1. 函数式编程简介与Python列表基础
## 1.1 函数式编程概述
函数式编程(Functional Programming,FP)是一种编程范式,其主要思想是使用纯函数来构建软件。纯函数是指在相同的输入下总是返回相同输出的函数,并且没有引起任何可观察的副作用。与命令式编程(如C/C++和Java)不同,函数式编程
【持久化存储】:将内存中的Python字典保存到磁盘的技巧

# 1. 内存与磁盘存储的基本概念
在深入探讨如何使用Python进行数据持久化之前,我们必须先了解内存和磁盘存储的基本概念。计算机系统中的内存指的
【Python高级应用】:正则表达式在字符串处理中的巧妙运用
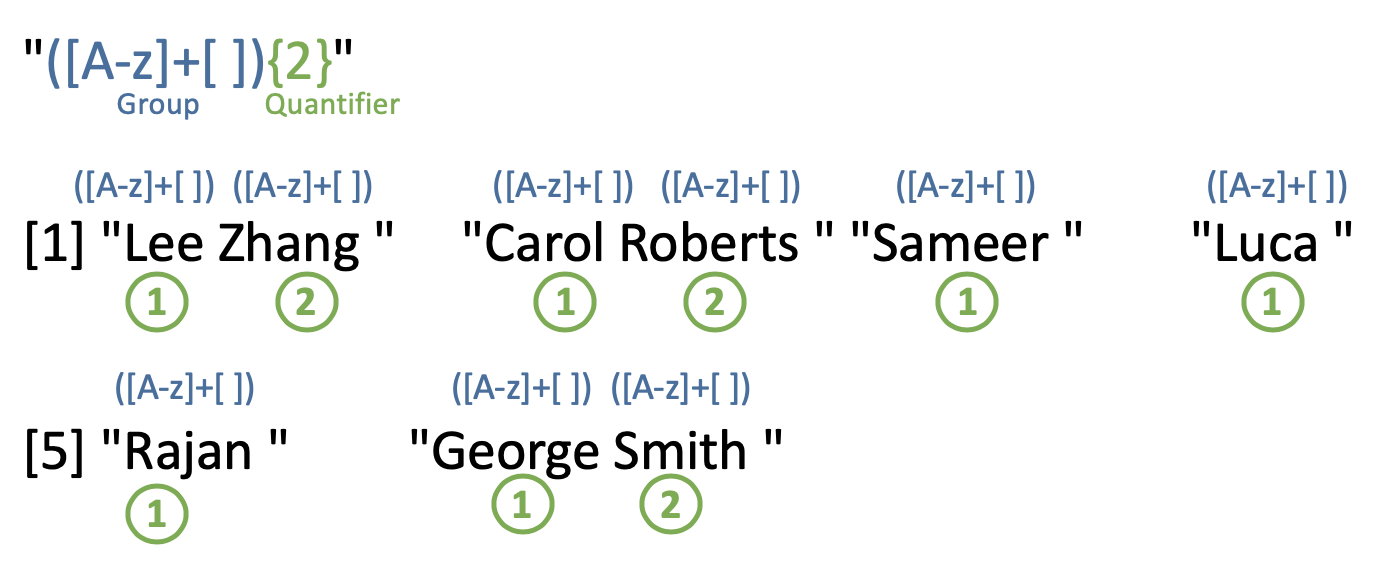
# 1. Python正则表达式的原理与基础
## 1.1 正则表达式的定义与功能
正则表达式,简称 regex 或 regexp,是一种文本模式,包含普通字符(如 a 到 z)和特殊字符(称为 "元字符")。它描述了一种字符串匹配的模式,并且常用于搜索、替换文本中的字符。
正则表达式的强大之处在于它能够检查一个字符串是否包含某种特定的子串,或者将字符串从一种模式转变成另一种模式。在
Python在语音识别中的应用:构建能听懂人类的AI系统的终极指南

# 1. 语音识别与Python概述
在当今飞速发展的信息技术时代,语音识别技术的应用范围越来越广,它已经成为人工智能领域里一个重要的研究方向。Python作为一门广泛应用于数据科学和机器学习的编程语言,因其简洁的语法和强大的库支持,在语音识别系统开发中扮演了重要角色。本章将对语音识别的概念进行简要介绍,并探讨Python在语音识别中的应用和优势。
语音识别技术本质上是计算机系统通过算法将人类的语音信号转换
Python list remove与列表推导式的内存管理:避免内存泄漏的有效策略
# 1. Python列表基础与内存管理概述
Python作为一门高级编程语言,在内存管理方面提供了众多便捷特性,尤其在处理列表数据结构时,它允许我们以极其简洁的方式进行内存分配与操作。列表是Python中一种基础的数据类型,它是一个可变的、有序的元素集。Python使用动态内存分配来管理列表,这意味着列表的大小可以在运行时根据需要进
Python索引的局限性:当索引不再提高效率时的应对策略

# 1. Python索引的基础知识
在编程世界中,索引是一个至关重要的概念,特别是在处理数组、列表或任何可索引数据结构时。Python中的索引也不例外,它允许我们访问序列中的单个元素、切片、子序列以及其他数据项。理解索引的基础知识,对于编写高效的Python代码至关重要。
## 理解索引的概念
Python中的索引从0开始计数。这意味着列表中的第一个元素
Python测试驱动开发(TDD)实战指南:编写健壮代码的艺术
# 1. 测试驱动开发(TDD)简介
测试驱动开发(TDD)是一种软件开发实践,它指导开发人员首先编写失败的测试用例,然后编写代码使其通过,最后进行重构以提高代码质量。TDD的核心是反复进行非常短的开发周期,称为“红绿重构”循环。在这一过程中,"红"代表测试失败,"绿"代表测试通过,而"重构"则是在测试通过后,提升代码质量和设计的阶段。TDD能有效确保软件质量,促进设计的清晰度,以及提高开发效率。尽管它增加了开发初期的工作量,但长远来
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )