【MPPT算法揭秘】:掌握光伏系统最大功率点追踪技术
发布时间: 2024-07-01 11:26:38 阅读量: 108 订阅数: 45 
# 1. 光伏系统概述**
光伏系统是一种将太阳能转化为电能的系统,主要由光伏电池阵列、逆变器、控制器和储能装置组成。光伏电池阵列是系统中最重要的部分,负责将太阳能转化为直流电。逆变器将直流电转化为交流电,以便与电网或负载连接。控制器负责调节系统的工作状态,确保光伏电池阵列始终工作在最大功率点(MPP)附近。储能装置可以存储多余的电能,以便在太阳能不足时使用。
# 2. MPPT算法理论基础**
**2.1 光伏电池特性与最大功率点**
光伏电池是一种将光能直接转化为电能的半导体器件。其输出特性受光照强度、电池温度和负载等因素的影响。光伏电池的输出特性曲线如下图所示:
[Image of PV cell output characteristics curve]
从图中可以看出,光伏电池的输出功率随输出电压和电流的变化而变化。在特定光照强度和电池温度下,存在一个输出功率最大的点,称为最大功率点(MPP)。
MPP的坐标由光伏电池的开路电压(Voc)和短路电流(Isc)决定。Voc是电池在没有负载时输出的电压,而Isc是电池在负载为零时输出的电流。MPP通常位于Voc和Isc之间,其电压和电流值分别为Vmpp和Impp。
**2.2 MPPT算法分类与原理**
MPPT算法是一种用于寻找光伏电池MPP的算法。根据算法原理的不同,MPPT算法可分为以下几类:
**2.2.1 扰动观察法**
扰动观察法是通过不断扰动光伏电池的输出电压或电流,观察输出功率的变化,从而找到MPP。扰动观察法包括增量式扰动观察法和递减式扰动观察法。
**2.2.1.1 增量式扰动观察法**
增量式扰动观察法通过不断增加或减小光伏电池的输出电压或电流,观察输出功率的变化。如果输出功率增加,则继续扰动;如果输出功率减小,则反向扰动。通过这种方式,算法可以逐步逼近MPP。
**2.2.1.2 递减式扰动观察法**
递减式扰动观察法与增量式扰动观察法类似,但扰动的幅度会随着算法的进行而逐渐减小。这种方法可以提高算法的稳定性和跟踪精度。
**2.2.2 导数法**
导数法通过计算光伏电池输出功率对输出电压或电流的导数,从而找到MPP。导数法包括斜率法和导数法。
**2.2.2.1 斜率法**
斜率法通过计算光伏电池输出功率对输出电压的斜率,从而找到MPP。当斜率为零时,光伏电池处于MPP。
**2.2.2.2 导数法**
导数法通过计算光伏电池输出功率对输出电压的导数,从而找到MPP。当导数为零时,光伏电池处于MPP。
**2.2.3 其他算法**
除了上述算法外,还有其他MPPT算法,如神经网络法、模糊逻辑法等。这些算法通常具有更高的跟踪精度和稳定性,但计算复杂度也更高。
# 3. MPPT算法实践应用**
### 3.1 扰动观察法
扰动观察法是一种经典的MPPT算法,其基本原理是通过对光伏电池的输出电压或电流进行微小扰动,并观察扰动后的输出功率变化,从而确定最大功率点。扰动观察法分为增量式扰动观察法和递减扰动观察法。
#### 3.1.1 增量式扰动观察法
增量式扰动观察法是一种最简单的扰动观察法,其原理是:
1. 对光伏电池的输出电压或电流进行一个固定的扰动量。
2. 测量扰动后的输出功率。
3. 如果扰动后的输出功率大于扰动前的输出功率,则继续朝同一方向扰动;否则,反向扰动。
4. 重复步骤1-3,直到找到最大功率点。
增量式扰动观察法的优点是简单易实现,但其缺点是收敛速度慢,并且容易陷入局部最大功率点。
#### 3.1.2 递减扰动观察法
递减扰动观察法是对增量式扰动观察法的改进,其原理是:
1. 对光伏电池的输出电压或电流进行一个固定的扰动量。
2. 测量扰动后的输出功率。
3. 如果扰动后的输出功率大于扰动前的输出功率,则继续朝同一方向扰动,但扰动量减小;否则,反向扰动,扰动量增加。
4. 重复步骤1-3,直到找到最大功率点。
递减扰动观察法的优点是收敛速度比增量式扰动观察法快,并且不容易陷入局部最大功率点。
### 3.2 导数法
导数法是一种基于光伏电池输出功率对电压或电流的导数为零的原理的MPPT算法。导数法分为斜率法和导数法。
#### 3.2.1 斜率法
斜率法是一种简单的导数法,其原理是:
1. 测量光伏电池的输出电压和电流。
2. 计算输出功率的斜率。
3. 如果斜率为零,则当前工作点为最大功率点;否则,根据斜率调整输出电压或电流。
4. 重复步骤1-3,直到找到最大功率点。
斜率法的优点是简单易实现,但其缺点是收敛速度慢,并且容易受到噪声的影响。
#### 3.2.2 导数法
导数法是一种更精确的导数法,其原理是:
1. 测量光伏电池的输出电压和电流。
2. 计算输出功率的导数。
3. 如果导数为零,则当前工作点为最大功率点;否则,根据导数调整输出电压或电流。
4. 重复步骤1-3,直到找到最大功率点。
导数法的优点是收敛速度比斜率法快,并且不容易受到噪声的影响。
**代码示例:**
```python
def perturb_and_observe(pv_array):
"""
扰动观察法MPPT算法
参数:
pv_array: 光伏电池阵列对象
返回:
最大功率点电压和电流
"""
# 设置扰动步长
step_size = 0.01
# 初始化工作点
v_current = pv_array.v_oc
i_current = pv_array.i_sc
# 循环直到找到最大功率点
while True:
# 扰动电压
v_new = v_current + step_size
# 测量扰动后的输出功率
p_new = pv_array.get_power(v_new, i_current)
# 如果扰动后的输出功率大于扰动前的输出功率,则继续朝同一方向扰动
if p_new > pv_array.get_power(v_current, i_current):
v_current = v_new
# 否则,反向扰动
else:
v_current = v_current - step_size
# 如果扰动量小于某个阈值,则认为已经找到最大功率点
if abs(step_size) < 1e-6:
break
# 返回最大功率点电压和电流
return v_current, i_current
```
**逻辑分析:**
该代码实现了增量式扰动观察法MPPT算法。首先,设置扰动步长,然后初始化工作点。接着,循环直到找到最大功率点。在循环中,扰动电压,测量扰动后的输出功率,并根据输出功率的变化调整扰动方向。如果扰动量小于某个阈值,则认为已经找到最大功率点,并返回最大功率点电压和电流。
**参数说明:**
* `pv_array`: 光伏电池阵列对象,包含光伏电池的特性参数。
* `step_size`: 扰动步长。
* `v_current`: 当前工作点电压。
* `i_current`: 当前工作点电流。
* `p_new`: 扰动后的输出功率。
# 4. MPPT算法优化与比较
### 4.1 MPPT算法的优化策略
#### 4.1.1 自适应步长算法
自适应步长算法是一种动态调整MPPT算法步长的策略,以提高算法的跟踪效率和稳定性。其基本原理是:
- 当光照条件变化较快时,增大步长以快速跟踪最大功率点。
- 当光照条件变化较慢时,减小步长以提高算法的稳定性。
自适应步长算法的实现方法有多种,其中一种常用的方法是:
```python
def adaptive_step_size(prev_step, error):
"""
自适应步长算法
参数:
prev_step: 上一步的步长
error: 当前误差
返回:
调整后的步长
"""
if abs(error) > threshold:
return prev_step * 2
else:
return prev_step / 2
```
**逻辑分析:**
此函数根据当前误差的大小动态调整步长。如果误差较大,则说明算法偏离最大功率点较远,需要增大步长以快速跟踪。如果误差较小,则说明算法接近最大功率点,需要减小步长以提高稳定性。
#### 4.1.2 混合算法
混合算法是一种将多种MPPT算法结合在一起的策略,以取长补短,提高算法的整体性能。常见的混合算法包括:
- **扰动观察法与导数法混合算法:**结合扰动观察法的快速跟踪能力和导数法的稳定性,在光照条件变化较快时使用扰动观察法,在光照条件变化较慢时使用导数法。
- **增量式扰动观察法与递减式扰动观察法混合算法:**结合增量式扰动观察法的快速响应和递减式扰动观察法的稳定性,在光照条件变化较大时使用增量式扰动观察法,在光照条件变化较慢时使用递减式扰动观察法。
混合算法的实现方法因具体算法而异,但其基本思路都是通过切换或加权的方式结合不同算法的优点。
### 4.2 MPPT算法的性能比较
#### 4.2.1 跟踪效率
跟踪效率是指MPPT算法跟踪最大功率点的速度和准确性。通常用以下指标来衡量:
- **上升时间:**算法从初始状态跟踪到最大功率点所需的时间。
- **稳态误差:**算法在最大功率点附近波动的幅度。
#### 4.2.2 稳定性
稳定性是指MPPT算法在光照条件变化或负载扰动下的稳定程度。通常用以下指标来衡量:
- **响应时间:**算法对光照条件变化或负载扰动的响应速度。
- **抗干扰能力:**算法在噪声或其他干扰条件下的稳定性。
**不同MPPT算法的性能比较:**
| 算法 | 跟踪效率 | 稳定性 |
|---|---|---|
| 增量式扰动观察法 | 高 | 低 |
| 递减式扰动观察法 | 中 | 高 |
| 斜率法 | 中 | 中 |
| 导数法 | 低 | 高 |
| 自适应步长算法 | 高 | 中 |
| 混合算法 | 高 | 高 |
总体而言,混合算法具有最高的跟踪效率和稳定性,但其实现复杂度也较高。在实际应用中,需要根据具体系统要求选择合适的MPPT算法。
# 5. MPPT算法在光伏系统中的应用
### 5.1 MPPT算法的硬件实现
MPPT算法的硬件实现主要分为模拟电路实现和数字电路实现两种方式。
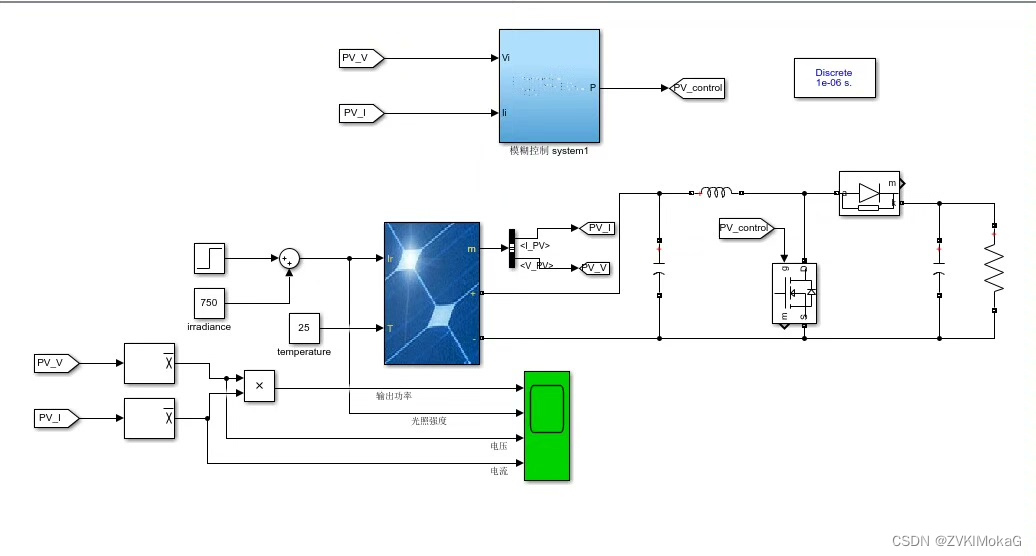
#### 5.1.1 模拟电路实现
模拟电路实现是利用模拟电路元件,如运放、比较器、电阻、电容等,构建出MPPT算法的电路。这种方式的优点是成本低、响应速度快,但灵活性较差,难以适应不同类型的MPPT算法。
#### 5.1.2 数字电路实现
数字电路实现是利用微处理器或DSP等数字电路元件,通过编程实现MPPT算法。这种方式的优点是灵活性高,可以根据不同的MPPT算法进行编程,但成本相对较高,响应速度也稍慢于模拟电路实现。
### 5.2 MPPT算法的实际应用案例
MPPT算法在光伏系统中的应用非常广泛,主要包括分布式光伏系统和集中式光伏电站。
#### 5.2.1 分布式光伏系统
分布式光伏系统是指安装在用户侧的小型光伏系统,通常安装在屋顶或地面上。由于分布式光伏系统规模较小,对MPPT算法的实时性和跟踪效率要求较高,因此通常采用数字电路实现的MPPT算法。
#### 5.2.2 集中式光伏电站
集中式光伏电站是指规模较大的光伏电站,通常安装在荒漠或戈壁等地区。由于集中式光伏电站规模较大,对MPPT算法的成本和稳定性要求较高,因此通常采用模拟电路实现的MPPT算法。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了光伏系统中至关重要的最大功率点追踪 (MPPT) 算法。从理论基础到实际应用,专栏文章全面解析了 MPPT 算法的原理、优化策略、仿真实验、应用案例、性能影响、常见问题、评价指标、算法选择和硬件实现。通过深入了解 MPPT 算法,读者可以掌握光伏系统最大功率点追踪技术,从而提高光伏系统的效率、降低成本和优化性能。专栏旨在为光伏行业从业者、研究人员和学生提供宝贵的知识和实用指导,助力光伏产业的发展。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
时间序列分析的置信度应用:预测未来的秘密武器
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
机器学习模型验证:自变量交叉验证的6个实用策略
# 1. 交叉验证在机器学习中的重要性
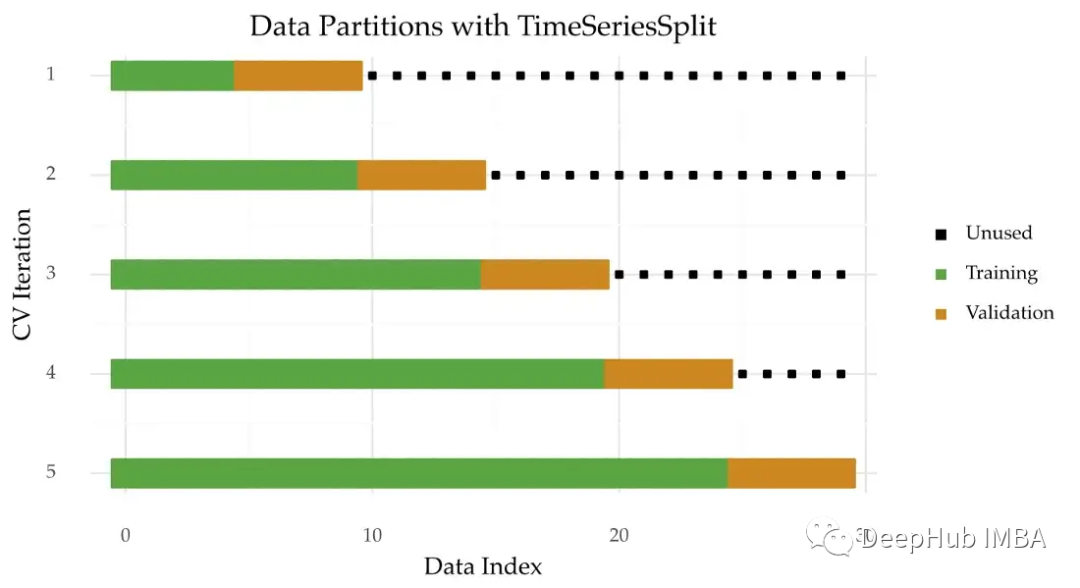
在机器学习和统计建模中,交叉验证是一种强有力的模型评估方法,用以估计模型在独立数据集上的性能。它通过将原始数据划分为训练集和测试集来解决有限样本量带来的评估难题。交叉验证不仅可以减少模型因随机波动而导致的性能评估误差,还可以让模型对不同的数据子集进行多次训练和验证,进而提高评估的准确性和可靠性。
## 1.1 交叉验证的目的和优势
交叉验证
【生物信息学中的LDA】:基因数据降维与分类的革命
# 1. LDA在生物信息学中的应用基础
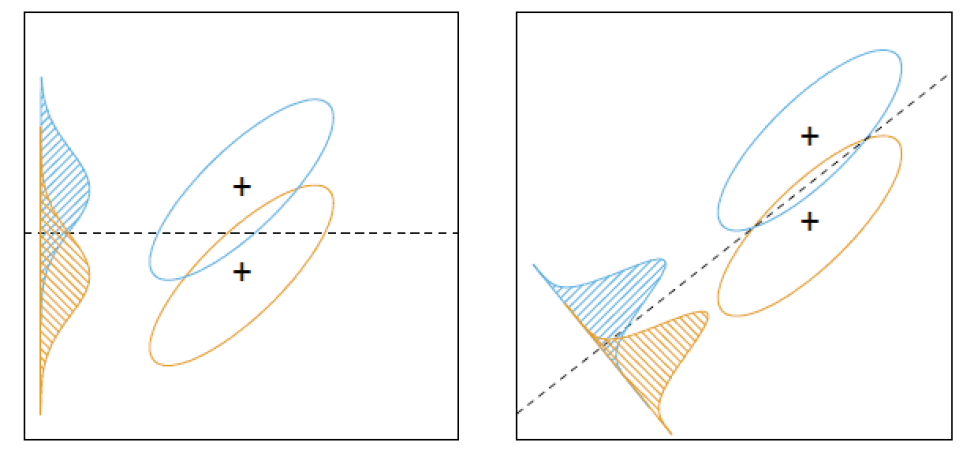
## 1.1 LDA的简介与重要性
在生物信息学领域,LDA(Latent Dirichlet Allocation)作为一种高级的统计模型,自其诞生以来在文本数据挖掘、基因表达分析等众多领域展现出了巨大的应用潜力。LDA模型能够揭示大规模数据集中的隐藏模式,有效地应用于发现和抽取生物数据中的隐含主题,这使得它成为理解复杂生物信息和推动相关研究的重要工具。
## 1.2 LDA在生物信息学中的应用场景
【目标变量优化】:机器学习中因变量调整的高级技巧
# 1. 目标变量优化概述
在数据科学和机器学习领域,目标变量优化是提升模型预测性能的核心步骤之一。目标变量,又称作因变量,是预测模型中希望预测或解释的变量。通过优化目标变量,可以显著提高模型的精确度和泛化能力,进而对业务决策产生重大影响。
## 目标变量的重要性
目标变量的选择与优化直接关系到模型性能的好坏。正确的目标变量可以帮助模
贝叶斯优化:智能搜索技术让超参数调优不再是难题
# 1. 贝叶斯优化简介
贝叶斯优化是一种用于黑盒函数优化的高效方法,近年来在机器学习领域得到广泛应用。不同于传统的网格搜索或随机搜索,贝叶斯优化采用概率模型来预测最优超参数,然后选择最有可能改进模型性能的参数进行测试。这种方法特别适用于优化那些计算成本高、评估函数复杂或不透明的情况。在机器学习中,贝叶斯优化能够有效地辅助模型调优,加快算法收敛速度,提升最终性能。
接下来,我们将深入探讨贝叶斯优化的理论基础,包括它的工作原理以及如何在实际应用中进行操作。我们将首先介绍超参数调优的相关概念,并探讨传统方法的局限性。然后,我们将深入分析贝叶斯优化的数学原理,以及如何在实践中应用这些原理。通过对
探索与利用平衡:强化学习在超参数优化中的应用
# 1. 强化学习与超参数优化的交叉领域
## 引言
随着人工智能的快速发展,强化学习作为机器学习的一个重要分支,在处理决策过程中的复杂问题上显示出了巨大的潜力。与此同时,超参数优化在提高机器学习模型性能方面扮演着关键角色。将强化学习应用于超参数优化,不仅可实现自动化,还能够通过智能策略提升优化效率,对当前AI领域的发展产生了深远影响。
## 强化学习与超参数优化的关系
强化学习能够通过与环境的交互来学
多变量时间序列预测区间:构建与评估

# 1. 时间序列预测理论基础
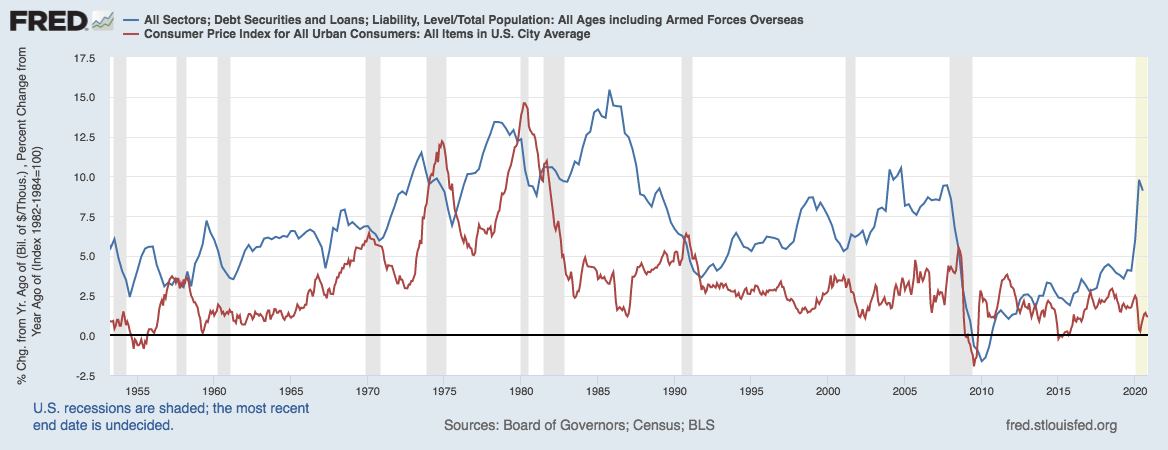
在现代数据分析中,时间序列预测占据着举足轻重的地位。时间序列是一系列按照时间顺序排列的数据点,通常表示某一特定变量随时间变化的情况。通过对历史数据的分析,我们可以预测未来变量的发展趋势,这对于经济学、金融、天气预报等诸多领域具有重要意义。
## 1.1 时间序列数据的特性
时间序列数据通常具有以下四种主要特性:趋势(Tre
时间复杂度可视化工具:直观理解算法性能的方法论

# 1. 时间复杂度的基本概念和重要性
在计算机科学领域,时间复杂度是一个描述算法执行时间与输入数据大小之间关系的度量。理解时间复杂度的概念对于开发高效且可扩展的软件至关重要。它不仅帮助我们预测算法在大规模数
模型参数泛化能力:交叉验证与测试集分析实战指南

# 1. 交叉验证与测试集的基础概念
在机器学习和统计学中,交叉验证(Cross-Validation)和测试集(Test Set)是衡量模型性能和泛化能力的关键技术。本章将探讨这两个概念的基本定义及其在数据分析中的重要性。
## 1.1 交叉验证与测试集的定义
交叉验证是一种统计方法,通过将原始数据集划分成若干小的子集,然后将模型在这些子集上进行训练和验证,以
【Python预测模型构建全记录】:最佳实践与技巧详解
# 1. Python预测模型基础
Python作为一门多功能的编程语言,在数据科学和机器学习领域表现得尤为出色。预测模型是机器学习的核心应用之一,它通过分析历史数据来预测未来的趋势或事件。本章将简要介绍预测模型的概念,并强调Python在这一领域中的作用。
## 1.1 预测模型概念
预测模型是一种统计模型,它利用历史数据来预测未来事件的可能性。这些模型在金融、市场营销、医疗保健和其
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )