揭秘FIR滤波器实现:算法和优化技巧,让滤波器性能更上一层楼
发布时间: 2024-07-02 11:47:40 阅读量: 206 订阅数: 47 

基于DA算法的FIR滤波器实现:高效硬件优化的视频处理方案与MATLAB、Verilog源码解析,基于DA算法的FIR滤波器实现:从原理到高效硬件优化的视频教程与源码解析,基于DA分布式算法的fir滤

# 1. FIR滤波器基础
FIR(有限脉冲响应)滤波器是一种数字滤波器,其脉冲响应是有限长度的。与IIR(无限脉冲响应)滤波器不同,FIR滤波器在稳定性方面具有优势,不会产生振荡。
FIR滤波器的主要优点包括:
- 线性相位响应,这意味着输入信号的相位不会随着频率而改变。
- 稳定的特性,不会产生自激振荡。
- 容易设计和实现。
# 2. FIR滤波器设计算法
### 2.1 窗函数法
#### 2.1.1 常用窗函数的特性
窗函数是一种加权函数,用于平滑滤波器的频率响应,减少旁瓣和泄漏。常用的窗函数包括:
- **矩形窗:**最简单的窗函数,没有加权,但产生最大的旁瓣。
- **汉宁窗:**一种平滑的窗函数,产生较低的旁瓣,但主瓣宽度较大。
- **海明窗:**比汉宁窗更平滑,旁瓣更低,但主瓣宽度更大。
- **布莱克曼窗:**最平滑的窗函数,旁瓣最低,但主瓣宽度最大。
#### 2.1.2 窗函数的选择和应用
窗函数的选择取决于滤波器的特定要求。对于需要低旁瓣的应用,布莱克曼窗是一个好的选择。对于需要窄主瓣的应用,矩形窗可能更合适。
### 2.2 最小二乘法
#### 2.2.1 滤波器系数的推导
最小二乘法是一种设计FIR滤波器的算法,通过最小化滤波器响应与理想响应之间的均方误差来获得滤波器系数。
设理想滤波器的频率响应为 H<sub>d</sub>(f),实际滤波器的频率响应为 H(f),则均方误差为:
```
E = ∫|H<sub>d</sub>(f) - H(f)|<sup>2</sup> df
```
通过求解使 E 最小的滤波器系数,可以得到:
```
h[n] = ∫H<sub>d</sub>(f)w[n]e<sup>-j2πfn</sup> df
```
其中 w[n] 是窗函数。
#### 2.2.2 算法的优缺点
最小二乘法具有以下优点:
- 产生具有最小均方误差的滤波器。
- 可以设计任意频率响应的滤波器。
缺点包括:
- 计算量大,尤其是对于长滤波器。
- 可能会产生不稳定的滤波器。
### 2.3 频率采样法
#### 2.3.1 算法原理和实现
频率采样法是一种设计FIR滤波器的算法,通过在理想滤波器的频率响应上进行采样来获得滤波器系数。
设理想滤波器的频率响应为 H<sub>d</sub>(f),采样频率为 f<sub>s</sub>,采样点为 f<sub>k</sub> = k·f<sub>s</sub>/N,其中 k = 0, 1, ..., N-1。则滤波器系数为:
```
h[n] = (1/N)∑<sub>k=0</sub><sup>N-1</sup>H<sub>d</sub>(f<sub>k</sub>)e<sup>-j2πf<sub>k</sub>n</sup>
```
#### 2.3.2 滤波器性能分析
频率采样法具有以下优点:
- 计算量小,适合于长滤波器。
- 产生稳定的滤波器。
缺点包括:
- 滤波器响应可能与理想响应有偏差,尤其是对于陡峭的截止频率。
- 对于某些类型的滤波器,可能会产生较大的旁瓣。
# 3. FIR滤波器优化技巧
### 3.1 滤波器系数量化
#### 3.1.1 量化方法和误差分析
滤波器系数量化是指将浮点系数转换为定点系数的过程。这可以降低滤波器的实现成本和功耗,但也会引入量化误差。
常用的量化方法有:
- **截断量化:**直接舍弃小数部分。
- **舍入量化:**四舍五入到最近的整数。
- **均匀量化:**将量化范围均匀地划分为多个区间,并将浮点系数映射到最近的区间中心。
量化误差主要取决于量化位数。量化位数越多,误差越小。
#### 3.1.2 量化对滤波器性能的影响
量化误差会影响滤波器的频率响应和相位响应。一般来说,量化位数越少,误差越大,滤波器性能下降越明显。
量化误差对滤波器性能的影响可以通过以下公式进行分析:
```
ΔH(f) = 20log10(1 - |H(f)|^2)
```
其中:
- ΔH(f) 为量化引起的频率响应误差
- H(f) 为理想滤波器的频率响应
### 3.2 滤波器结构优化
#### 3.2.1 直接形式和转置形式
FIR滤波器有两种基本的实现结构:直接形式和转置形式。
**直接形式:**
```
y(n) = b0x(n) + b1x(n-1) + ... + bNx(n-N)
```
**转置形式:**
```
y(n) = a1y(n-1) + a2y(n-2) + ... + aNy(n-N) + bx(n)
```
转置形式的优点是乘法器共享度更高,可以减少乘法器的数量。
#### 3.2.2 乘法器共享和流水线技术
乘法器共享是指利用乘法器系数的共性来减少乘法器的数量。流水线技术是指将滤波器运算分解为多个阶段,并行执行,以提高运算效率。
### 3.3 滤波器并行化
#### 3.3.1 并行处理的原理
滤波器并行化是指将滤波器运算分配到多个处理单元并行执行。这可以大幅提高滤波器的处理速度。
#### 3.3.2 并行化实现方法
滤波器并行化的实现方法有:
- **空间并行:**将滤波器系数分配到多个处理单元,每个处理单元负责计算一部分输出。
- **时间并行:**将滤波器运算分解为多个阶段,每个阶段由不同的处理单元并行执行。
# 4. FIR滤波器实践应用
### 4.1 音频信号处理
FIR滤波器在音频信号处理中发挥着至关重要的作用,其应用包括:
#### 4.1.1 噪声滤除和均衡
FIR滤波器可以有效地滤除音频信号中的噪声,例如背景噪声、嗡嗡声和嘶嘶声。通过使用低通滤波器或带通滤波器,可以去除不需要的频率分量,从而提高音频信号的清晰度和可听性。
#### 4.1.2 语音增强和回声消除
FIR滤波器在语音增强和回声消除中也扮演着重要的角色。通过使用自适应滤波器,可以估计并消除环境噪声和回声,从而提高语音信号的质量和可懂度。
### 4.2 图像处理
FIR滤波器在图像处理中也有广泛的应用,包括:
#### 4.2.1 图像锐化和去噪
FIR滤波器可以用于锐化图像,增强边缘和细节。通过使用高通滤波器,可以去除图像中的模糊和噪声,从而提高图像的清晰度。
#### 4.2.2 边缘检测和纹理分析
FIR滤波器还可以用于边缘检测和纹理分析。通过使用Sobel算子或Canny算子,可以检测图像中的边缘和纹理特征。这些特征对于图像分割、目标识别和纹理分类至关重要。
### 4.3 通信系统
FIR滤波器在通信系统中也得到了广泛的应用,包括:
#### 4.3.1 信道均衡和干扰抑制
FIR滤波器可以用于信道均衡,补偿信道引起的失真和衰减。通过使用自适应滤波器,可以动态调整滤波器系数,以适应信道的变化。此外,FIR滤波器还可以用于抑制干扰,例如邻近信道的干扰或噪声。
#### 4.3.2 信号调制和解调
FIR滤波器在信号调制和解调中也发挥着重要作用。通过使用匹配滤波器,可以最大化接收信号的信噪比,从而提高解调性能。此外,FIR滤波器还可以用于调制信号的整形,以满足特定的频谱要求。
# 5. FIR滤波器前沿技术
### 5.1 可重构FIR滤波器
可重构FIR滤波器是一种能够动态调整滤波器系数的滤波器,使其适应不断变化的信号环境。
#### 5.1.1 滤波器系数的动态调整
可重构FIR滤波器通过使用可调系数来实现滤波器系数的动态调整。这些可调系数通常由数字信号处理器(DSP)或现场可编程门阵列(FPGA)控制。
#### 5.1.2 适应性滤波器的应用
适应性滤波器是一种可重构FIR滤波器,其系数可以根据输入信号自动调整。适应性滤波器广泛用于噪声消除、回声消除和信号预测等应用中。
### 5.2 FIR滤波器的FPGA实现
FPGA(现场可编程门阵列)是一种可编程逻辑器件,可用于实现FIR滤波器。
#### 5.2.1 FPGA架构和FIR滤波器设计
FPGA由可配置逻辑块(CLB)组成,这些CLB可以连接在一起以形成自定义数字电路。FIR滤波器可以在FPGA上实现为一个流水线结构,其中每个CLB执行滤波器计算的一个阶段。
#### 5.2.2 硬件优化和性能分析
FPGA实现FIR滤波器时,需要考虑硬件优化和性能分析。优化技术包括乘法器共享、流水线技术和并行处理。性能分析包括延迟、吞吐量和功耗的测量。
**代码示例:**
```verilog
module FIR_filter #(
parameter N = 8, //滤波器阶数
parameter BW = 16 //数据位宽
) (
input clk,
input [BW-1:0] in,
output [BW-1:0] out
);
reg [BW-1:0] reg_in [0:N-1]; //输入寄存器
reg [BW-1:0] reg_out [0:N-1]; //输出寄存器
reg [BW-1:0] coeff [0:N-1]; //滤波器系数
always @(posedge clk) begin
//移位寄存器
for (int i = 0; i < N; i++) begin
reg_in[i] <= reg_in[i+1];
reg_out[i] <= reg_out[i+1];
end
reg_in[N-1] <= in;
//滤波计算
out <= 0;
for (int i = 0; i < N; i++) begin
out <= out + reg_in[i] * coeff[i];
end
end
endmodule
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“FIR滤波器”专栏深入探讨了FIR(有限脉冲响应)滤波器的各个方面,从理论基础到实际实现。专栏文章涵盖了滤波器设计秘籍、实现算法和优化技巧、性能评估和改进策略、在图像和信号处理中的应用,以及在通信系统中的重要性。通过深入浅出的讲解和丰富的案例,专栏旨在帮助读者全面掌握FIR滤波器的原理、设计、实现和应用,让读者能够轻松设计和使用FIR滤波器,从而提高信号处理和通信系统的性能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【GP系统集成实战】:将GP Systems Scripting Language无缝融入现有系统

# 摘要
GP系统脚本语言作为一种集成和自动化工具,在现代企业信息系统中扮演着越来越重要的角色。本文首先概述了GP系统脚本语言的核心概念及其集成的基础理论,包括语法结构、执行环境和系统集成的设计原则。随后,文章深入探讨了GP系统集成的实战技巧,涵盖数据库集成、网络功能、企业级应用实践等方面。此外,本文还分析了GP系统集成在高
【Twig模板性能革命】:5大技巧让你的Web飞速如风

# 摘要
Twig作为一款流行的模板引擎,在现代Web开发中扮演着重要角色,它通过高效的模板语法和高级特性简化了模板的设计和维护工作。本文从Twig的基本语法开始,逐步深入到性能优化和实际应用技巧,探讨了模板继承、宏的使用、自定义扩展、
【正确方法揭秘】:爱普生R230废墨清零,避免错误操作,提升打印质量
# 摘要
废墨清零是确保打印机长期稳定运行的关键维护步骤,对于保障打印质量和设备性能具有重要的基础作用。本文系统介绍了废墨清零的基础知识、操作原理、实践操作以及其对打印质量的影响。通过对废墨产生、积累机制的理解,本文阐述了废墨清零的标准操作步骤和准备工作,同时探讨了实践中可能遇到的问题及其解决方法。文章还分析了废墨清零操作如何正面影响打印质量,并提出了避免错误操作的建议。最后,本文探讨了其他提升打印质量的方法和技巧,包括硬件选择、日常维护
【降噪耳机功率管理】:优化电池使用,延长续航的权威策略

# 摘要
本文全面探讨了降噪耳机的功率管理问题,从理论基础到实践应用,再到未来发展趋势进行了系统性的分析。首先介绍了降噪耳机功率消耗的现状,并探讨了电池技术与功耗管理系统设计原则。随后,文章深入到硬件节能技术、软件算法以及用户交互等方面的实际功率管
避免K-means陷阱:解决初始化敏感性问题的实用技巧
# 摘要
K-means聚类算法作为一种广泛使用的无监督学习方法,在数据分析和模式识别领域中发挥着重要作用。然而,其初始化过程中的敏感性问题可能导致聚类结果不稳定和质量不一。本文首先介绍了K-means算法及其初始化问题,随后探讨了初始化敏感性的影响及传统方法的不足。接着,文章分析了聚类性能评估标准,并提出了优化策略,包括改进初始化方法和提升聚类结果的稳定性。在此基础上,本文还展示了改进型K-means
STM32 CAN扩展应用宝典:与其他通信协议集成的高级技巧

# 摘要
本论文重点研究了STM32微控制器在不同通信协议集成中的应用,特别是在CAN通信领域的实践。首先介绍了STM32与CAN通信的基础知识,然后探讨了与其他通信协议如RS232/RS485、以太网以及工业现场总线的集成理论和实践方法。详细阐述了硬件和软件的准备、数据传输、错误处理、安全性增强等关键技术点。本文还提供了在STM32平台上实现高性能网络通信的高
ARCGIS分幅图打印神技:高质量输出与分享的秘密
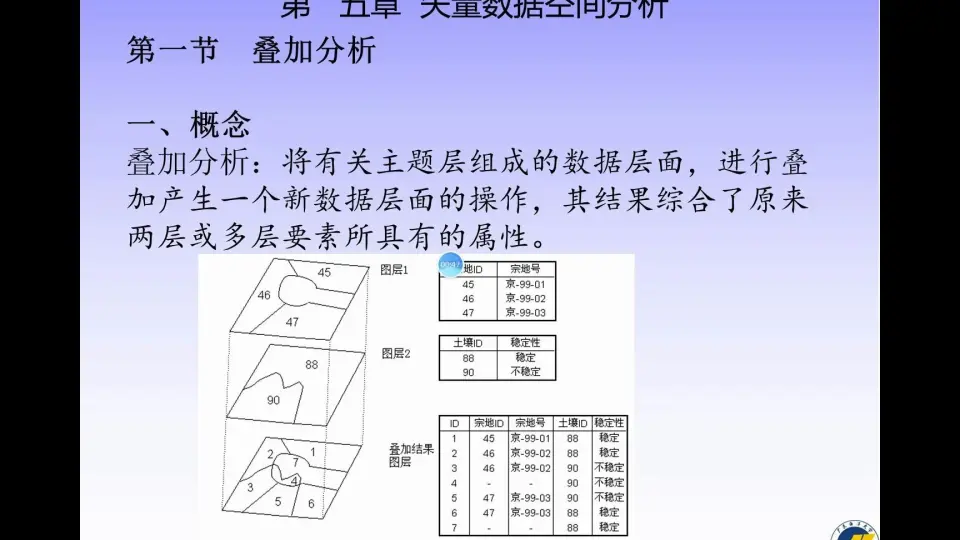
# 摘要
ARCGIS分幅图打印在地图制作和输出领域占据重要地位,本论文首先概述了分幅图打印的基本概念及其在地图输出中的作用和标准规范。随后,深入探讨了分幅图设计的原则,包括用户界面体验与输出质量效率的平衡,以及打印的技术要求,例如分辨率选择和色彩管理。接着,本文提供了分幅图制作和打印的实践技巧,包括数据处理、模板应用、打印设置及输出保存方法。
【install4j更新机制深度剖析】:自动检测与安装更新的高效方案
# 摘要
随着软件维护和分发需求的增加,自动更新工具的开发变得日益重要。本文对install4j更新机制进行了全面的分析,介绍了其市场定位和更新流程的必要性。文章深入解析了update检测机制、安装步骤以及更新后应用程序的行为,并从理论基础和实践案例两个维度探讨
【多网络管理】:Quectel-CM模块的策略与技巧

# 摘要
随着物联网技术的发展,多网络管理的重要性日益凸显,尤其是在确保设备在网络间平滑切换、高效传输数据方面。本文首先强调多网络管理的必要性及其应用场景,接着详细介绍Quectel-CM模块的硬件与软件架构。文章深入探讨了基于Quectel-CM模块的网络管理策略,包括网络环境配置、状态监控、故
【ETL与数据仓库】:Talend在ETL过程中的应用与数据仓库深层关系
# 摘要
随着信息技术的不断发展,ETL(提取、转换、加载)与数据仓库已成为企业数据处理和决策支持的重要技术。本文首先概述了ETL与数据仓库的基础理论,明确了ETL过程的定义、作用以及数据抽取、转换和加载的原理,并介绍了数据仓库的架构及其数据模型。随后,本文深入探讨了Talen
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )