智能机器人的动态平衡与躯干控制
发布时间: 2024-01-15 09:05:27 阅读量: 62 订阅数: 38 
# 1. 简介
## 1.1 智能机器人的发展背景
智能机器人是指具有自主学习、感知环境、决策、执行任务等能力的机器人系统。随着科技的不断进步,智能机器人在工业、服务、医疗等领域越来越广泛地应用。
智能机器人的发展背景可以追溯到上个世纪,当时的机器人主要应用于汽车制造、物料搬运等场景,起到劳动力替代的作用。随着自动化技术的发展,机器人被赋予了更多的智能化能力,能够通过传感器感知周围环境,并根据环境的变化做出相应的反应。
## 1.2 动态平衡与躯干控制的重要性
动态平衡指的是机器人在运动过程中保持稳定的能力。在实际运动中,机器人需要面对各种不同的外界干扰和动态变化,例如地面起伏、风力等因素,这些干扰会对机器人的平衡造成影响。因此,实现动态平衡对于智能机器人的安全和稳定性非常重要。
躯干控制是指机器人躯干部分的设计和控制。躯干是机器人的中心部分,通常包括主体骨架、传感器、执行器等组件。躯干的设计和控制直接影响到机器人的运动能力和灵活性。通过合理的躯干结构和控制算法,可以使机器人具备良好的动态平衡和运动控制能力。
综上所述,动态平衡与躯干控制是智能机器人中至关重要的技术,对于实现机器人的安全、稳定、高效运动具有重要意义。在接下来的章节中,将对动态平衡技术、智能机器人的躯干结构与功能设计、动态平衡控制算法及实现以及在工业与服务机器人中的应用进行详细介绍和讨论。
# 2. 动态平衡技术概述
动态平衡是智能机器人领域的一个重要研究方向,它涉及到机器人在运动过程中保持平衡的能力。本章将对动态平衡技术进行概述,包括定义和原理、挑战与难题,以及目前应用于智能机器人动态平衡的方法。
### 2.1 动态平衡的定义和原理
动态平衡是指一个物体在运动过程中能够保持稳定的状态,不会倾倒或失去平衡。对于智能机器人来说,动态平衡是实现其正常运动和执行任务的基础。动态平衡的原理主要有以下几点:
1. 躯干控制:智能机器人通过运用控制算法来实现躯干的平衡控制。通过感知和反馈调节,机器人可以借助惯性、力矩和扭矩等物理原理来保持平衡。
2. 动力学控制:智能机器人运动过程中的动力学特性也是动态平衡的重要因素。通过对机器人的运动学和动力学研究,可以确定合适的控制策略,从而实现动态平衡。
3. 神经控制:模仿生物动物的平衡能力,智能机器人可以借鉴神经系统的控制机制。通过构建神经网络模型和优化算法,可以实现智能机器人的动态平衡控制。
### 2.2 动态平衡的挑战与难题
实现智能机器人的动态平衡面临着许多挑战和难题。其中主要包括以下几个方面:
1. 多自由度控制:智能机器人通常具有多个自由度,需要同时控制多个关节的运动。这增加了控制的复杂性和难度,需要设计高效的控制算法。
2. 计算复杂度:动态平衡的实现需要进行大量的计算,并要求实时性。对于计算能力有限的智能机器人来说,如何在有限的时间内完成复杂计算是一个挑战。
3. 环境适应性:智能机器人在不同的环境中运动和执行任务,需要根据环境的变化来调节平衡控制。如何实现智能机器人的环境适应性,是一个需要解决的问题。
### 2.3 目前应用于智能机器人动态平衡的方法
目前,已经有多种方法被应用于智能机器人的动态平衡控制。其中一些常用的方法包括:
1. PID控制算法:PID控制算法是一种基本的控制算法,通过调节比例、积分和微分三个参数来实现动态平衡控制。它简单易实现,但对于复杂的系统存在性能限制。
2. 模糊控制算法:模糊控制算法通过建立模糊规则和模糊推理来实现动态平衡控制。它可以应对系统的非线性和不确定性,但需要大量的经验知识和专家规则的支持。
3. 强化学习算法:强化学习算法是一种基于试错的学习方法,可以通过与环境的交互来优化控制策略。对于复杂系统的动态平衡控制,强化学习算法具有一定的优势。
综上所述,动态平衡技术是智能机器人领域的一项重要技术,它涉及到躯干控制、动力学控制和神经控制等多方面的研究。解决动态平衡中的各种挑战和难题,将为智能机器人的运动和执行任务提供更多可能性。
# 3. 智能机器人躯干结构与功能设计
智能机器人的躯干结构设计需要考虑到其稳定性、灵活性和功能性,以确保机器人在各种工作场景下能够保持动态平衡和高效运行。本章将介绍智能机器人躯干结构与功能设计的特点、要求和案例分享。
#### 3.1 躯干结构的特

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏旨在介绍智能机器人的开发与系统框架,包含多个相关主题,涵盖了机器人领域的关键技术与应用。文章从概述智能机器人的基本概念和发展趋势开始,探讨了机器人的机械结构设计和优化,以及传感器在智能机器人中的作用。同时,还深入讲解了智能机器人的运动控制与路径规划,图像处理与视觉感知,深度学习、语音识别和自然语言处理在机器人中的应用。此外,还介绍了机器学习算法的应用,以及智能机器人的人机交互和用户界面设计。同时,还涵盖了智能机器人的物体抓取与操作技术,机器人导航与定位技术,环境感知与建图技术等多个重要主题。另外,还探讨了多机器人系统的协作与通信问题,以及智能机器人的动态平衡与躯干控制,力觉反馈与力控技术等方面的研究与实践。同时,还介绍了计算机视觉和情感识别在智能机器人中的应用,以及智能机器人的自主学习与知识表达。通过这些文章,读者能够深入了解智能机器人的技术原理和应用场景,为相关领域的研究和开发提供指导与参考。
(共224字)
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
扇形菜单高级应用

# 摘要
扇形菜单作为一种创新的用户界面设计方式,近年来在多个应用领域中显示出其独特优势。本文概述了扇形菜单设计的基本概念和理论基础,深入探讨了其用户交互设计原则和布局算法,并介绍了其在移动端、Web应用和数据可视化中的应用案例
C++ Builder高级特性揭秘:探索模板、STL与泛型编程

# 摘要
本文系统性地介绍了C++ Builder的开发环境设置、模板编程、标准模板库(STL)以及泛型编程的实践与技巧。首先,文章提供了C++ Builder的简介和开发环境的配置指导。接着,深入探讨了C++模板编程的基础知识和高级特性,包括模板的特化、非类型模板参数以及模板
【深入PID调节器】:掌握自动控制原理,实现系统性能最大化

# 摘要
PID调节器是一种广泛应用于工业控制系统中的反馈控制器,它通过比例(P)、积分(I)和微分(D)三种控制作用的组合来调节系统的输出,以实现对被控对象的精确控制。本文详细阐述了PID调节器的概念、组成以及工作原理,并深入探讨了PID参数调整的多种方法和技巧。通过应用实例分析,本文展示了PID调节器在工业过程控制中的实际应用,并讨
【Delphi进阶高手】:动态更新百分比进度条的5个最佳实践

# 摘要
本文针对动态更新进度条在软件开发中的应用进行了深入研究。首先,概述了进度条的基础知识,然后详细分析了在Delphi环境下进度条组件的实现原理、动态更新机制以及多线程同步技术。进一步,文章探讨了数据处理、用户界面响应性优化和状态视觉呈现的实践技巧,并提出了进度
【TongWeb7架构深度剖析】:架构原理与组件功能全面详解
# 摘要
TongWeb7作为一个复杂的网络应用服务器,其架构设计、核心组件解析、性能优化、安全性机制以及扩展性讨论是本文的主要内容。本文首先对TongWeb7的架构进行了概述,然后详细分析了其核心中间件组件的功能与特点,接着探讨了如何优化性能监控与分析、负载均衡、缓存策略等方面,以及安全性机制中的认证授权、数据加密和安全策略实施。最后,本文展望
【S参数秘籍解锁】:掌握驻波比与S参数的终极关系
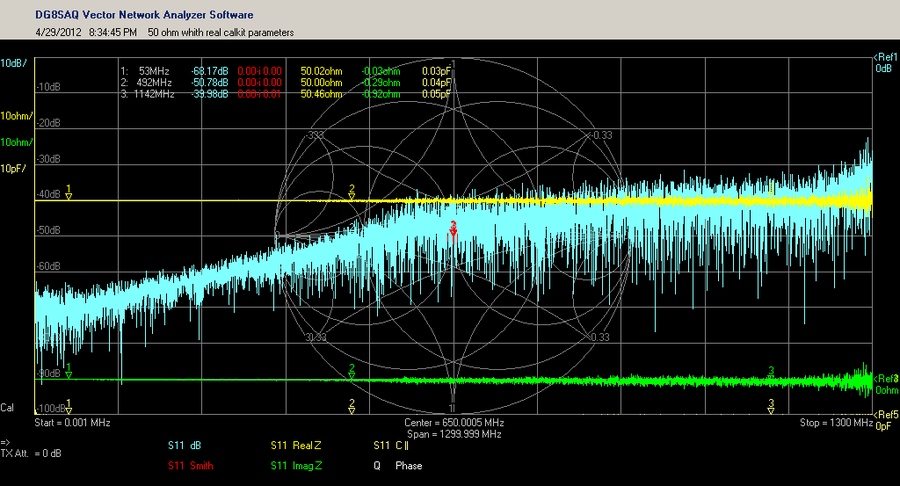
# 摘要
本论文详细阐述了驻波比与S参数的基础理论及其在微波网络中的应用,深入解析了S参数的物理意义、特性、计算方法以及在电路设计中的实践应用。通过分析S参数矩阵的构建原理、测量技术及仿真验证,探讨了S参数在放大器、滤波器设计及阻抗匹配中的重要性。同时,本文还介绍了驻波比的测量、优化策略及其与S参数的互动关系。最后,论文探讨了S参数分析工具的使用、高级分析技巧,并展望
【嵌入式系统功耗优化】:JESD209-5B的终极应用技巧
# 摘要
本文首先概述了嵌入式系统功耗优化的基本情况,随后深入解析了JESD209-5B标准,重点探讨了该标准的框架、核心规范、低功耗技术及实现细节。接着,本文奠定了功耗优化的理论基础,包括功耗的来源、分类、测量技术以及系统级功耗优化理论。进一步,本文通过实践案例深入分析了针对JESD209-5B标准的硬件和软件优化实践,以及不同应用场景下的功耗优化分析。最后,展望了未来嵌入式系统功耗优化的趋势,包括新兴技术的应用、JESD209-5B标准的发展以及绿色计算与可持续发展的结合,探讨了这些因素如何对未来的功耗优化技术产生影响。
# 关键字
嵌入式系统;功耗优化;JESD209-5B标准;低功耗
ODU flex接口的全面解析:如何在现代网络中最大化其潜力
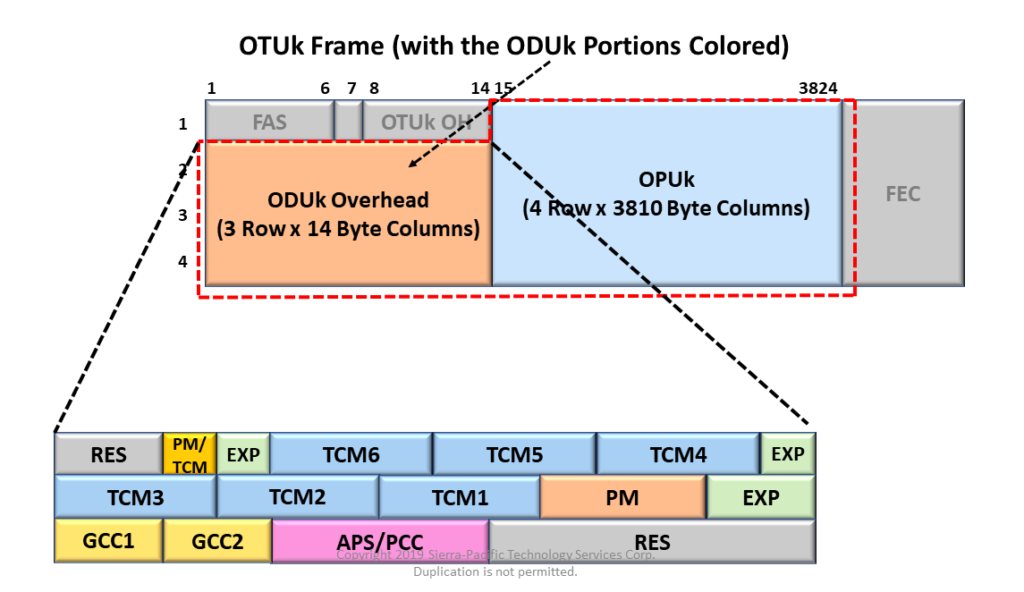
# 摘要
ODU flex接口作为一种高度灵活且可扩展的光传输技术,已经成为现代网络架构优化和电信网络升级的重要组成部分。本文首先概述了ODU flex接口的基本概念和物理层特征,紧接着深入分析了其协议栈和同步机制,揭示了其在数据中心、电信网络、广域网及光纤网络中的应用优势和性能特点。文章进一步
如何最大化先锋SC-LX59的潜力
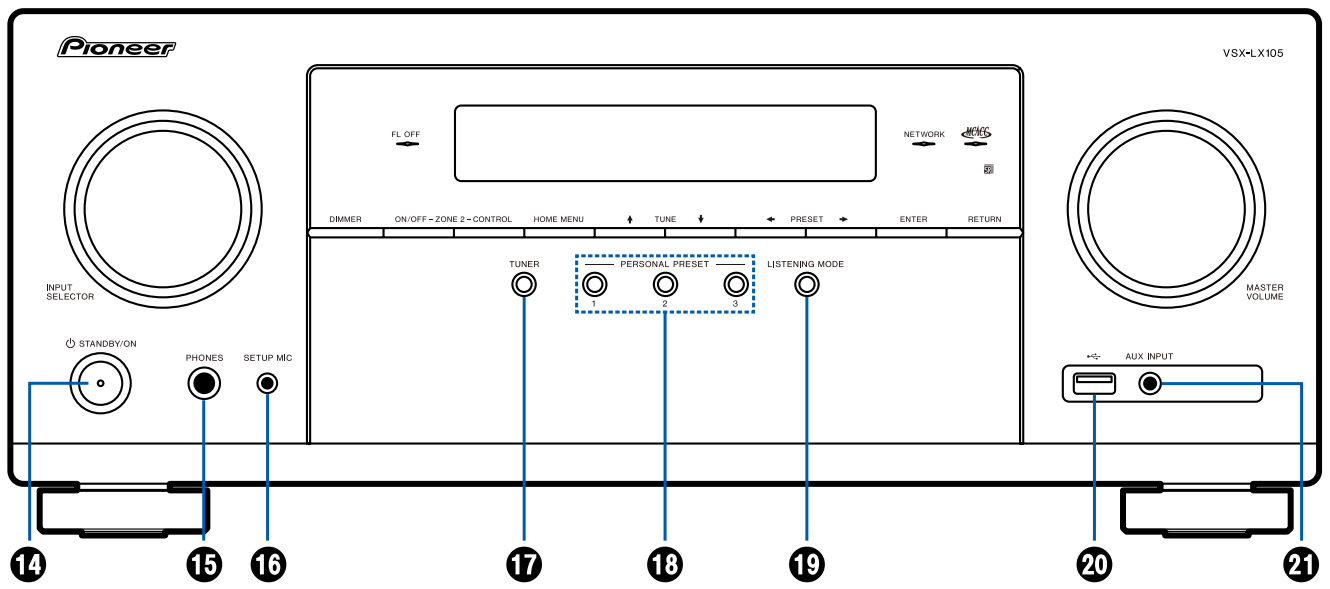
# 摘要
先锋SC-LX59作为一款高端家庭影院接收器,其在音视频性能、用户体验、网络功能和扩展性方面均展现出巨大的潜力。本文首先概述了SC-LX59的基本特点和市场潜力,随后深入探讨了其设置与配置的最佳实践,包括用户界面的个性化和音画效果的调整,连接选项与设备兼容性,以及系统性能的调校。第三章着重于先锋SC-LX59在家庭影院中的应用,特别强调了音视频极致体验、智能家居集成和流媒体服务的充分利用。在高
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )