【CART决策树调优技巧】:参数调整与性能优化
发布时间: 2024-09-04 13:57:58 阅读量: 177 订阅数: 33 

基于纯verilogFPGA的双线性差值视频缩放 功能:利用双线性差值算法,pc端HDMI输入视频缩小或放大,然后再通过HDMI输出显示,可以任意缩放 缩放模块仅含有ddr ip,手写了 ram,f

# 1. CART决策树基本概念与原理
CART(Classification and Regression Trees)算法,即分类与回归树,是一种常见的决策树算法。在这一章节中,我们将深入探讨CART决策树的基本概念和工作原理。
决策树是一种树形结构的模型,它通过一系列的问题对数据进行分类或回归。每一个内部节点代表了一个属性上的测试,每一个分支代表了测试结果的输出,而每一个叶节点代表了最终的类别或数值输出。
CART算法的核心在于将数据集不断分割为更小的子集,同时在每个分割点上找到最优的特征和特征值。这种分割过程会持续到满足某个终止条件,比如所有数据都属于同一类或者树达到预设的最大深度。
CART不仅支持分类问题,还能处理回归问题,这就使得它在各种领域中都有广泛的应用。在接下来的章节中,我们将详细介绍CART的关键参数、参数调优实践、性能评估以及行业应用案例。
# 2. CART决策树的关键参数解析
## 2.1 分裂标准的选择与影响
### 2.1.1 Gini不纯度与信息增益率
在构建CART决策树时,分裂标准的选择对于树的结构和模型的性能至关重要。最常用的标准包括基尼不纯度(Gini Impurity)和信息增益率(Gain Ratio)。基尼不纯度是度量样本划分不纯度的一种方式,当所有样本都属于同一个类别时,基尼不纯度达到最小值0。选择基尼不纯度作为分裂标准的决策树算法被称为CART(Classification and Regression Trees)。
信息增益率是基于信息熵的概念。信息熵度量了一个特征对于样本标签的预测能力,信息增益则是分裂前后信息熵的减少量。信息增益率在信息增益的基础上加入了分裂信息(Split Information),是信息增益与分裂信息的比值,用于惩罚具有过多分割值的特征。
```python
from sklearn.tree import DecisionTreeClassifier
# 创建决策树模型实例,使用基尼不纯度作为分裂标准
model_gini = DecisionTreeClassifier(criterion='gini', random_state=42)
# 使用信息增益率作为分裂标准
model_gain_ratio = DecisionTreeClassifier(criterion='entropy', random_state=42)
# ...后续模型训练和评估代码
```
代码逻辑分析:`DecisionTreeClassifier`是构建决策树模型的常用类,通过`criterion`参数我们可以选择分裂标准,`gini`和`entropy`分别代表基尼不纯度和信息增益率。
### 2.1.2 分裂点的选取方法
分裂点的选择是通过比较特征值并找到最佳分割点来完成的。在连续型特征中,分裂点的选取是一个寻找最优阈值的过程,这通常涉及到遍历所有可能的分割点并计算分裂后的不纯度。对于分类特征,分裂点通常是类别标签的不同组合。
```python
# 示例:使用不同特征进行分裂,展示分裂点选择过程
from sklearn.datasets import load_iris
from sklearn.tree import DecisionTreeClassifier
import numpy as np
iris = load_iris()
X = iris.data[:, 2:4] # 选择两个特征用于演示
y = iris.target
# 选择基尼不纯度为分裂标准,构建决策树模型
clf = DecisionTreeClassifier(criterion='gini', random_state=42)
# 训练模型
clf.fit(X, y)
# 获取决策树的决策路径
path = clf.decision_path(X)
# 选取第一个决策节点,获取该节点的分裂点
node_id = np.where(path.toarray()[:, 0] == 1)[1][0]
split_index = clf.tree_.feature[node_id]
split_value = clf.tree_.threshold[node_id]
print(f"分裂特征索引: {split_index}, 分裂阈值: {split_value}")
```
代码逻辑分析:此代码段首先加载了一个简单的鸢尾花数据集,然后通过`DecisionTreeClassifier`构建模型,并训练它。通过获取模型的`decision_path`,我们可以查看数据是如何通过决策节点进行分裂的。最后,我们根据特定的`node_id`查询决策树的分裂特征索引和阈值。
## 2.2 树的剪枝策略与过拟合控制
### 2.2.1 预剪枝与后剪枝的区别和应用
预剪枝是在树构建的过程中提前停止树的增长,而后剪枝是在树完全构建后再移除一些节点。预剪枝策略包括限制树的最大深度、最小样本数以及要求一个节点的不纯度降低到一定的阈值。后剪枝则是通过评估节点的纯度提升和成本复杂度来确定哪些节点应该被剪枝。
```mermaid
graph TD;
A[开始构建决策树] --> B[节点分裂];
B --> C{是否满足停止条件?};
C -->|是| D[预剪枝];
C -->|否| E[进一步分裂节点];
E --> C;
D --> F[生成预剪枝决策树];
F --> G[对生成的树进行后剪枝评估];
G --> H[后剪枝优化树结构];
H --> I[完成剪枝的决策树]
```
流程图分析:该流程图描述了剪枝决策树构建的基本步骤。预剪枝和后剪枝都在决策树构建过程中扮演了重要角色,它们的共同目的是防止模型过拟合并提升模型的泛化能力。
### 2.2.2 过拟合的原因及其影响
过拟合是指模型对训练数据过度拟合,导致它在未见过的新数据上的表现下降。过拟合的原因包括模型过于复杂、特征选择不当、数据量不足等。过拟合会导致模型在实际应用中的泛化能力降低,无法有效地预测或分类新样本。
```python
from sklearn.datasets import make_classification
from sklearn.tree import DecisionTreeClassifier
from sklearn.model_selection import train_test_split
from sklearn.metrics import accuracy_score
# 生成一个模拟的分类数据集
X, y = make_classification(n_samples=1000, n_features=10, n_informative=5, n_redundant=5, n_classes=2, random_state=42)
# 将数据集分为训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 构建一个过拟合的决策树模型
overfit_model = DecisionTreeClassifier(max_depth=100, random_state=42)
# 训练模型
overfit_model.fit(X_train, y_train)
# 对测试集进行预测
y_pred = overfit_model.predict(X_test)
# 评估模型
accuracy = accuracy_score(y_test, y_pred)
print(f"模型的准确率: {accuracy}")
```
代码逻辑分析:上述代码展示了如何构建一个容易过拟合的决策树模型。通过设置一个非常大的树深度和不适当的特征选择,模型在训练集上的表现可能会很好,但是在独立的测试集上的表现可能就会显著下降,这通常是过拟合的迹象。
## 2.3 节点的最小样本数和深度限制
### 2.3.1 样本数限制对决策树的影响
节点的最小样本数是树构建过程中的一个重要参数。它规定了分裂节点时所需的最小样本数。这个参数的设置直接影响到决策树的复杂度和模型的泛化能力。较小的最小样本数可能会导致模型学习到一些不必要的特征,进而导致过拟合;而较大的最小样本数有助于提升模型的泛化能力。
```python
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.tree import DecisionTreeClassifier
from sklearn.metrics import accuracy_score
# 加载数据集
iris = load_iris()
X = iris.data
y = iris.target
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.3, random_state=42)
# 设置不同的最小样本数进行模型训练
for min_samples_split in range(2, 11):
clf = DecisionTreeClassifier(min_samples_split=min_samples_split, random_state=42)
clf.fit(X_train, y_train)
y_pred = clf.predict(X_test)
accuracy = accuracy_score(y_test, y_pred)
print(f"最小样本数为{min_samples_split}时的模型准确率: {accuracy}")
```
代码逻辑分析:通过调整`min_samples_split`参数,我们可以观察不同最小样本数下模型在测试集上的准确率。这可以帮助我们找到一个合适的最小样本数,以达到最佳的泛化效果。
### 2.3.2 树深度对模型泛化能力的影响
决策树的深度是另一个重要的超参数,它控制了树的深度。限制树的深度可以防止过拟合,因为更深的树倾向于捕捉训练数据中的更多细节,包括噪声。树的深度限制和节点的最小样本数是相互关联的,它们共同决定了树的复杂性。
```python
# 使用之前相同的数据集和代码逻辑,但额外引入控制树深度的代码
for max_depth in range(1, 11):
clf = DecisionTreeClassifier(max_depth=max_depth, random_state=42)
clf.fit(X_train, y_train)
y_pred = clf.predict(X_test)
accuracy = accuracy_score(y_test, y_pred)
print(f"树深度为{max_depth}时的模型准确率: {accuracy}")
```
代码逻辑分析:通过调整`max_depth`参数,我们可以观察不同深度下模型的准确率。这有助于我们找到合适的树深度,以平衡模型的性能和复杂度。
# 3. CART决策树的参数调优实践
CART(Classification and Regression Trees)决策树是一种非参数监督学习方法,用于分类与回归。在构建决策树模型时,调优参数以获得最佳的性能至关重要。这一章节将深入探讨如何通过实践来优化CART决策树的参数,并介绍一些常用的参数调优方法。
## 3.1 网格搜索与交叉验证的结合使用
### 3.1.1 参数网格的设计原则
在模型训练中,网格搜索(Grid Search)是一个穷

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
CART决策树模型专栏深入探讨了CART决策树在数据科学和机器学习中的应用。专栏文章涵盖了广泛的主题,包括:
* **实战应用:**构建高效的数据分类系统,实现准确的预测和决策。
* **调优技巧:**通过参数调整和性能优化,提升决策树模型的准确性和效率。
* **特征选择:**识别关键预测变量,提高模型的可解释性和预测能力。
* **金融风控应用:**构建信用评分模型,评估借款人的信用风险。
* **可视化展示:**直观地理解决策过程,便于模型解释和调试。
* **机器学习竞赛应用:**利用CART决策树在机器学习竞赛中提升排名,获得更好的成绩。
专栏内容深入浅出,既适合初学者了解CART决策树的基础知识,也为经验丰富的从业者提供了有价值的见解和技巧。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
S32K SPI开发者必读:7大优化技巧与故障排除全攻略
# 摘要
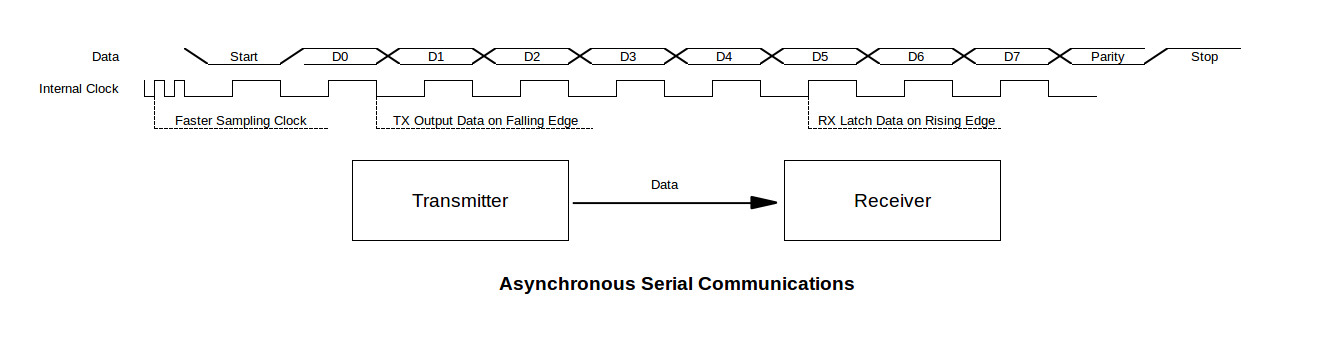
本文深入探讨了S32K微控制器的串行外设接口(SPI)技术,涵盖了从基础知识到高级应用的各个方面。首先介绍了SPI的基础架构和通信机制,包括其工作原理、硬件配置以及软件编程要点。接着,文章详细讨论了SPI的优化技巧,涵盖了代码层面和硬件性能提升的策略,并给出了故障排除及稳定性的提升方法。实战章节着重于故障排除,包括调试工具的使用和性能瓶颈的解决。应用实例和扩展部分分析了SPI在
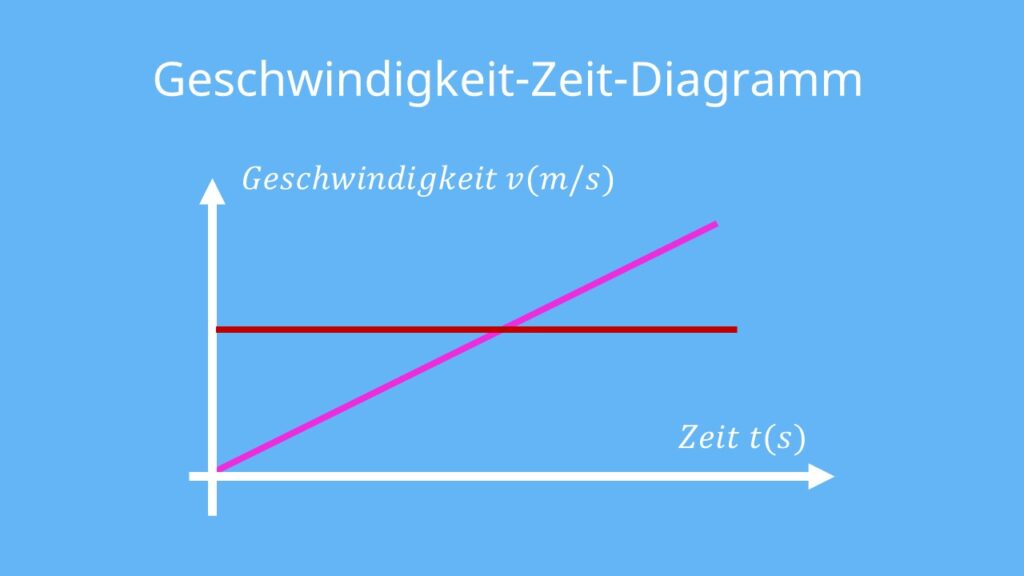
图解数值计算:快速掌握速度提量图的5个核心构成要素
# 摘要
本文全面探讨了速度提量图的理论基础、核心构成要素以及在多个领域的应用实例。通过分析数值计算中的误差来源和减小方法,以及不同数值计算方法的特点,本文揭示了实现高精度和稳定性数值计算的关键。同时,文章深入讨论了时间复杂度和空间复杂度的优化技巧,并展示了数据可视化技术在速度提量图中的作用。文中还举例说明了速度提量图在
动态规划:购物问题的终极解决方案及代码实战

# 摘要
动态规划是解决优化问题的一种强大技术,尤其在购物问题中应用广泛。本文首先介绍动态规划的基本原理和概念,随后深入分析购物问题的动态规划理论,
【随机过程精讲】:工程师版习题解析与实践指南
# 摘要
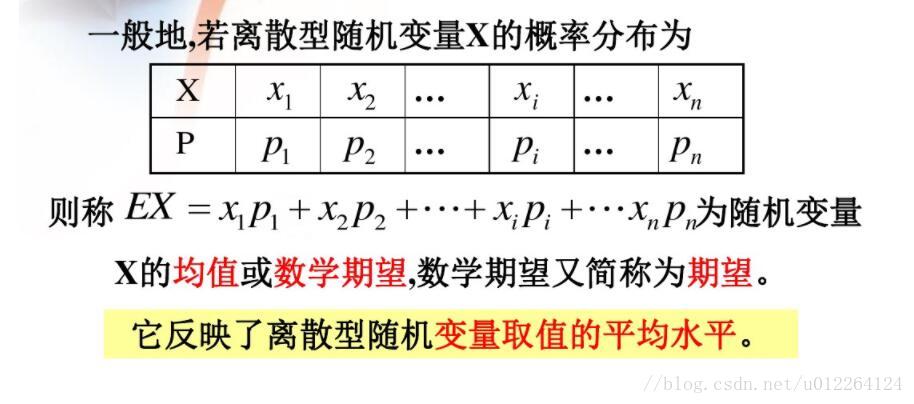
随机过程是概率论的一个重要分支,被广泛应用于各种工程和科学领域中。本文全面介绍了随机过程的基本概念、分类、概率分析、关键理论、模拟实现以及实践应用指南。从随机变量的基本统计特性讲起,深入探讨了各类随机过程的分类和特性,包括马尔可夫过程和泊松过程。文章重点分析了随机过程的概率极限定理、谱分析和最优估计方法,详细解释了如何通过计算机模拟和仿真软件来实现随机过程的模拟。最后,本文通过工程问题中随机过程的实际应用案例,以
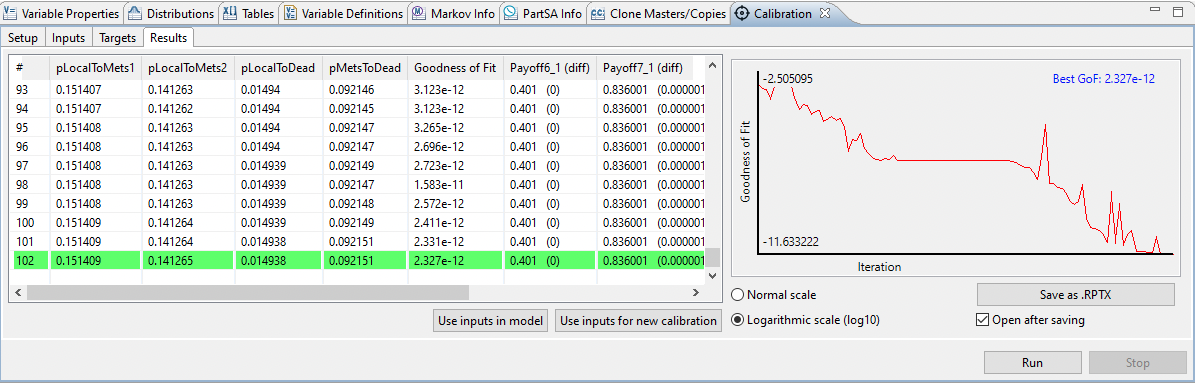
【QSPr高级应用案例】:揭示工具在高通校准中的关键效果
# 摘要
本论文旨在介绍QSPr工具及其在高通校准中的基础和应用。首先,文章概述了QSPr工具的基本功能和理论框架,探讨了高通校准的重要性及其相关标准和流程。随后,文章深入分析了QSPr工具的核心算法原理和数据处理能力,并提供了实践操作的详细步骤,包括数据准备、环境搭建、校准执行以及结果分析和优化。此外,通过具体案例分析展示了QSPr工具在不同设备校准中的定制
Tosmana配置精讲:一步步优化你的网络映射设置

# 摘要
Tosmana作为一种先进的网络映射工具,为网络管理员提供了一套完整的解决方案,以可视化的方式理解网络的结构和流量模式。本文从基础入门开始,详细阐述了网络映射的理论基础,包括网络映射的定义、作用以及Tosmana的工作原理。通过对关键网络映射技术的分析,如设备发现、流量监控,本文旨在指导读者完成Tosmana网络映射的实战演练,并深入探讨其高级应用,包括自动化、安全威胁检测和插件应用。最
【Proteus与ESP32】:新手到专家的库添加全面攻略
# 摘要
本文详细介绍Proteus仿真软件和ESP32微控制器的基础知识、配置、使用和高级实践。首先,对Proteus及ESP32进行了基础介绍,随后重点介绍了在Proteus环境下搭建仿真环境的步骤,包括软件安装、ESP32库文件的获取、安装与管理。第三章讨论了ESP32在Proteus中的配置和使用,包括模块添加、仿真
【自动控制系统设计】:经典措施与现代方法的融合之道
# 摘要
自动控制系统是工业、航空、机器人等多个领域的核心支撑技术。本文首先概述了自动控制系统的基本概念、分类及其应用,并详细探讨了经典控制理论基础,包括开环和闭环控制系统的原理及稳定性分析方法。接着,介绍了现代控制系统的实现技术,如数字控制系统的原理、控制算法的现代实现以及高级控制策略。进一步,本文通过设计实践,阐述了控制系统设计流程、仿真测试以及实际应用案例。此外,分析了自动控制系统设计的当前挑战和未
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )