【充电桩智能控制与通信】:DIN 70121下的消息处理策略
发布时间: 2024-12-26 09:05:17 阅读量: 7 订阅数: 6 
# 摘要
本论文详细探讨了充电桩智能控制与通信的技术要求和实现策略。首先,概述了充电桩的基本功能和DIN 70121标准框架,分析了消息处理在标准中的角色以及对智能控制的影响。接着,深入讨论了消息处理策略的理论基础,包括通信模型、消息队列设计、错误处理和数据完整性保障机制。在实践应用方面,本文着重阐述了实时数据处理、故障诊断与响应机制以及安全性要求和实现方法。最后,通过分析一个具体案例,展示了智能控制系统的通信实现,并对未来技术发展趋势进行了展望。论文旨在为充电桩智能控制系统的优化与升级提供理论支持和实践指导。
# 关键字
充电桩;智能控制;通信协议;DIN 70121标准;消息处理;数据完整性;故障诊断;安全性要求;系统集成;技术发展趋势
参考资源链接:[DIN 70121 充电标准:应用层消息详解与握手协议](https://wenku.csdn.net/doc/feeuoiref8?spm=1055.2635.3001.10343)
# 1. 充电桩智能控制与通信概述
## 1.1 智能充电桩的基本概念
智能充电桩是利用现代电子技术和通信手段,对电动汽车充电过程进行智能化控制与管理的设备。它能够实现远程监控、自动计费、故障检测等功能,极大提升了充电效率和用户体验。
## 1.2 通信技术在充电桩中的作用
通信技术是智能充电桩不可或缺的一环,它使得充电桩可以接入网络,实现与中央控制系统、用户终端等的实时信息交换。通信方式包括有线和无线,如以太网、Wi-Fi、蓝牙以及蜂窝网络等。
## 1.3 智能控制与通信的重要性
随着电动汽车的普及,对充电桩的性能要求越来越高。智能控制与通信技术的结合不仅保障了充电安全,还促进了充电网络的优化配置和运维效率的提升。通过智能控制系统,可以有效地调度充电负荷,平衡电网负荷,实现更加智能化的能源管理。
这一章节简要介绍了智能充电桩的基本概念和工作原理,为理解后续章节关于DIN 70121标准框架、消息处理策略、智能控制系统的通信实现等内容打下了基础。智能充电桩的智能化控制和高效通信能力是实现其功能的核心,而良好的系统设计能够进一步提升用户体验和充电桩的整体性能。
# 2. DIN 70121标准框架
## 2.1 DIN 70121标准简介
### 2.1.1 标准产生的背景与发展
DIN 70121是针对电动汽车充电站通信协议的德国标准,它的发展背景与电动汽车行业的增长紧密相连。随着电动汽车市场的迅速扩张,为确保不同厂商生产的充电设备能够有效互通,需要一套标准化的通信协议。DIN 70121正是应此需求而生,旨在统一充电站与电动汽车之间的通信方式,提供安全可靠的数据交换。
DIN 70121标准经过多次修订,不断完善,以适应技术进步和市场需求。从最初为直流快充站提供的标准开始,逐步扩展到了交流充电桩以及无线充电等新型充电技术。该标准的每次更新都反映了行业的发展趋势,确保了其在业界的领先地位和适用性。
### 2.1.2 标准中的关键术语和定义
在深入探讨DIN 70121标准的具体内容之前,理解其中的关键术语是非常必要的。标准定义了包括但不限于以下几个术语:
- **CCS(Combined Charging System)**:组合充电系统,是一种用于电动汽车充电的国际标准接口,可以支持交流和直流充电。
- **DCCP(DC Charge Protocol)**:直流充电协议,是充电站与电动汽车之间用于直流充电的通信协议。
- **Provisioning**:设备配置,指的是在充电过程中,对充电站进行的初始化、参数设置等操作。
- **Proximity Pilot Signal**:接近信号,用于电动汽车与充电站之间的距离测量和通信。
这些术语的明确有助于相关从业人员和开发者更好地理解标准,并在设计、实施充电系统时保持一致性。
## 2.2 消息处理在标准中的角色
### 2.2.1 消息类型和结构
DIN 70121标准中定义了多种消息类型,以满足充电过程中的不同需求。消息分为请求消息、响应消息、通知消息和命令消息等。这些消息类型确保了充电过程中双方可以有效地交互信息,从而协调充电行为和状态。
每种消息都有严格的结构,通常包含消息头和消息体两部分。消息头包括了消息类型标识、发送者和接收者信息、消息长度和校验码等。消息体则包含了具体的数据内容,如能量需求、支付信息等。这种结构化设计有助于提高消息处理的效率和准确性。
### 2.2.2 消息的优先级和处理规则
在标准中,不同类型的消息被赋予了不同的优先级。例如,紧急情况下的报警消息通常具有最高优先级,而普通的状态更新消息则优先级较低。这样的优先级划分确保了在紧急或关键情况下,消息能够被及时处理。
为了保证消息处理的顺序性和实时性,标准还规定了相应的消息处理规则。这些规则定义了如何处理接收到的消息,包括消息确认、重试机制和超时处理等。通过这些机制,可以确保通信双方能够有效地应对网络延迟、消息丢失等潜在问题,保证整个充电过程的顺畅进行。
## 2.3 标准对智能控制的影响
### 2.3.1 标准对充电过程的控制要求
DIN 70121标准对充电过程中的智能控制提出了明确的要求。智能控制不仅包括对充电电压、电流等参数的精确控制,还包括对充电过程的监控和管理。例如,标准规定充电站必须能够在发生故障时及时中止充电,并通知用户。
智能控制还涉及与充电相关的各种功能,比如用户认证、支付处理和能源管理。这些功能的实现需要标准的支持,以确保它们能够在各种设备和系统之间无缝工作。DIN 70121通过定义标准的消息格式和通信协议,为这些智能控制功能的实现提供了基础。
### 2.3.2 智能控制技术与标准的结合
在智能控制技术的推动下,电动汽车充电站正在变得更加智能化、网络化。DIN 70121标准的引入,使得不同厂商和不同技术的充电设备可以无缝连接和交互。这不仅提高了用户体验,也促进了整个充电生态系统的成熟和发展。
结合智能控制技术,DIN 70121标准也在不断演进中。例如,为了应对电动汽车大规模接入电网可能带来的冲击,标准也在考虑需求响应(DR)技术的应用。通过智能控制和标准的结合,充电站可以更加智能化地响应电网负荷变化,从而实现能源的优化配置。
结合智能控制技术后,DIN 70121标准不仅能够满足当前的需求,还能适应未来技术的发展,确保了充电基础设施的长期可持续性。
# 3. 消息处理策略的理论基础
随着信息技术的快速发展,消息处理策略成为了通信系统设计中的核心要素之一。在本章节中,我们将探讨消息处理策略的理论基础,包括通信模型与协议、消息编码与解码机制、消息队列与调度算法,以及错误处理与数据完整性技术。
## 3.1 消息通信理论
### 3.1.1 通信模型和协议基础
在任何消息处理系统中,通信模型是定义消息如何在网络中传输的基础。ISO/OSI模型是一种常见的理论模型,它将通信过程分为七层:物理层、数据链路层、网络层、传输层、会话层、表示层和应用层。每一层负责不同的通信功能,上层与下层相互独立,通过接口进行交互。TCP/IP模型简化了这一架构,主要包含四层:链接层、网络层、传输层和应用层。
在充电桩控制系统中,通信协议是确保设备间有效通信的关键。协议定义了消息的格式、传输方式以及连接建立和终止的规则。例如,充电桩与管理平台之间通信时,可能会用到Modbus、MQTT等协议。
### 3.1.2 消息的编码和解码机制
消息编码是将数据转换为适合网络传输的格式,解码则是将接收到的网络消息转换回原始数据格式的过程。在不同的通信层面上,编码和解码的方法可能会有所不同。
编码技术需要考虑数据压缩、字符编码、数据加密等多种因素。例如,JSON和XML是两种常见的消息编码格式,它们以文本形式存在,易于阅读和编写,但数据量通常比二进制格式大。在二进制编码格式中,协议如Protobuf能够提供更紧凑的数据表示。
### 3.1.3 章节总结
在本小节中,我们了解了通信模型的基础理论,包括ISO/OSI模型和TCP/IP模型,并且探索了通信协议在实际应用中的重要性。此外,消息的编码与解码机制也被介绍,包括常见的编码格式及其应用。
## 3.2 消息队列与调度算法
### 3.2.1 消息队列的设计和实现
消息队列是一种用于在多个进程间传递消息的先进先出的数据结构。它允许不同的系统组件通过消息交换信息,而不必考虑其他组件的位置或状态。在充电桩系统中,消息队列可以用于处理来自不同充电桩的状态信息,或者管理对充电设备的访问请求。
实现消息队列时,需要考虑消息持久化、事务处理、消息过滤等关键特性。一个消息队列系统通常包括消息队列服务器和客户端库。RabbitMQ、Apache Kafka和ActiveMQ是业界常见的消息队列实现。
### 3.2.2 调度算法的选择和优化
调度算法决定消息如何从队列中取出并传递给处理程序。在高并发和高吞吐量的通信系统中,调度算法的选择和优化尤为关键。
常见的调度算法包括轮询(Round Robin)、优先级调度(Priority Scheduling)和最少连接(Least Connections)。在设计调度算法时,需要根据消息的优先级、处理时间以及系统的实际需求来进行优化。例如,高优先级的消息可能需要立即处理,而低优先级的消息则可以在系统负载较低时按顺序处理。
### 3.2.3 章节总结
本小节介绍了消息队列在系统设计中的重要性,以及如何通过调度算法管理消息的处理顺序。我们讨论了实现消息队列时需要考虑的关键特性,以及如何针对不同类型的消息应用不同的调度策略。
## 3.3 错误处理与数据完整性
### 3.3.1 错误检测与纠正技术
通信过程中错误的检测与纠正技术是保障数据完整性的核心部分。常见的错误检测技术包括奇偶校验、校验和(Checksum)、循环冗余检验(CRC)等。错误纠正技术则包括前向错误纠正(FEC)和自动重传请求(ARQ)。
在消息处理策略中,错误检测和纠正技术可以用来确保消息在传输过程中不被损坏或丢失。例如,TCP协议使用ARQ技术,通过确认响应和重传机制来保证数据包的完整性。
### 3.3.2 数据完整性的保障机制
数据完整性保障机制确保数据在存储、传输和处理过程中保持一致性和准确性。这通常通过使用消息摘要、数字签名和加密技术来实现。消息摘要技术如SHA-256能够为消息生成一个唯一指纹,任何数据的改变都会导致指纹的变化,从而可以检测数据的完整性。
数字签名可以确保消息的来源和内容没有被篡改。加密技术如AES和RSA可以保护数据在传输过程中的隐私性和安全性。
### 3.3.3 章节总结
在本小节中,我们探讨了错误处理与数据完整性的重要性,以及实现这些目标所使用的具体技术。我们分析了错误检测与纠正技术的不同方法,并讨论了保障数据完整性的重要性及其相关技术。
本章节为充电桩智能控制与通信的理论基础部分,深入讲解了通信模型、协议、消息处理、队列调度及错误处理和数据完整性保障的理论和技术。这些理论是实践应用和系统设计的根基。在下一章节中,我们将看到这些理论是如何被应用到实际项目中的。
# 4. 消息处理策略的实践应用
## 4.1 实时数据处理
在智能控制系统中,实时数据处理是确保系统性能和响应速度的关键。以下内容将详细介绍实时消息的捕获与处理方法以及数据流的同步与异步处理策略。
### 4.1.1 实时消息的捕获与处理
实时消息的捕获是指从数据源中快速而准确地获取数据,并立即进行初步的处理。这一阶段的重点是减少数据处理的延迟,并确保数据的实时性。例如,在充电桩控制系统中,充电桩状态的变化(如充电开始、结束、故障等)需要实时被系统捕捉并作出反应。
实现这一目标通常涉及以下几个步骤:
1. 事件监听:通过配置监听器,系统可以实时捕获到事件的发生。这些监听器可以基于硬件接口的中断机制或是软件层面的轮询机制。
2. 数据缓存:捕获的数据通常先存储在内存中的缓冲区,以便进行快速处理。
3. 预处理:在数据传递到处理单元前,进行格式化、数据校验等预处理操作。
4. 消息分发:处理后的数据按照预定逻辑分发到不同的处理模块,如数据分析、存储、报警等。
```python
import queue
# 示例代码:使用Python的queue模块来实现一个简单的消息队列
message_queue = queue.Queue()
def producer():
"""生产者:产生消息并放入队列"""
while True:
# 模拟数据获取
message = get_realtime_data()
message_queue.put(message)
def consumer():
"""消费者:从队列中获取消息并处理"""
while True:
message = message_queue.get()
process_message(message)
def get_realtime_data():
"""模拟获取实时数据"""
pass
def process_message(message):
"""处理消息"""
pass
# 启动生产者和消费者
if __name__ == '__main__':
import threading
producer_thread = threading.Thread(target=producer)
consumer_thread = threading.Thread(target=consumer)
producer_thread.start()
consumer_thread.start()
```
在上述代码中,我们创建了两个线程:生产者线程和消费者线程。生产者线程负责将实时数据放入队列中,而消费者线程从队列中取出数据进行处理。这种方式可以保证数据处理的实时性,同时避免了数据处理过程中的阻塞。
### 4.1.2 数据流的同步与异步处理
同步处理和异步处理是数据处理策略的两个重要方面。在同步处理中,系统在进行数据处理时必须等待当前操作完成后才能继续处理下一个操作。而异步处理则允许系统在处理一个操作的同时,准备或处理其他的操作。
为了说明这两种处理方式,我们可以参考以下示例:
- **同步处理示例**:用户请求充电,系统处理该请求并等待充电过程结束,之后再响应用户。
```python
def request_charging():
# 同步处理,等待充电过程结束
charging_process()
# 充电结束后响应用户
response_to_user()
def charging_process():
# 模拟充电过程
pass
def response_to_user():
# 模拟用户响应
pass
request_charging()
```
- **异步处理示例**:用户请求充电,系统启动充电过程后立即给用户响应,然后在后台继续处理充电过程。
```python
import threading
def request_charging():
# 异步处理,不等待充电过程结束就响应用户
threading.Thread(target=charging_process).start()
response_to_user()
def charging_process():
# 模拟充电过程
pass
def response_to_user():
# 模拟用户响应
pass
request_charging()
```
从以上两个示例可以看出,异步处理通过使用多线程或异步IO操作,提高了系统的响应速度和并发处理能力。然而,同步处理通常在逻辑简单、任务较轻的情况下使用,因为它能简化程序的设计。
### 4.2 故障诊断与响应机制
故障诊断与响应机制是智能控制系统稳定运行的重要保障。在本节中,我们将详细介绍常见故障模式、诊断方法以及故障处理流程和响应策略。
### 4.2.1 常见故障模式和诊断方法
故障模式是指系统或设备在运行过程中可能出现的各种故障类型。充电桩智能控制系统常见的故障模式包括:
- 充电桩无响应或不工作
- 充电电压、电流异常
- 通信中断或数据丢失
- 人为破坏或操作不当
针对这些故障模式,系统需要具备相应的诊断方法。常见的诊断方法包括:
- 日志分析:通过查看系统日志记录,分析故障发生的时间点和可能原因。
- 信号监测:实时监测充电桩的状态信号,对异常信号进行报警。
- 远程诊断:通过远程通信接口,获取充电桩的工作数据和错误代码。
- 硬件检测:对充电桩的硬件部件进行定期检查和测试。
### 4.2.2 故障处理流程和响应策略
一旦故障被诊断出来,系统需要立即采取相应的处理流程和响应策略。故障处理流程一般包括以下几个步骤:
1. **故障确认**:系统首先确认故障的类型和严重程度。
2. **故障隔离**:必要时将故障设备从系统中隔离,防止故障扩散。
3. **故障处理**:根据故障类型进行处理,如重启设备、手动干预、远程修复等。
4. **故障记录**:将故障信息记录到日志中,供后续分析和复盘使用。
5. **恢复服务**:故障解决后,确保系统恢复正常运行,并通知相关人员。
响应策略则需要根据故障的性质来定制。对于紧急且严重的故障,如可能发生电击或火灾,系统应立即切断电源并触发紧急程序。对于非紧急故障,系统可以采取逐步恢复或提示用户采取措施的方式。
### 4.3 安全性要求与实现
安全性是智能控制系统设计中不可忽视的重要环节。本节将重点讨论在消息处理策略中如何实现加密技术应用和防篡改及身份验证机制。
### 4.3.1 加密技术在消息处理中的应用
加密技术可以防止数据在传输过程中被非法窃取或篡改。在充电桩控制系统中,涉及到用户隐私的数据(如支付信息)和控制指令都需要进行加密处理。
常见的加密方法包括:
- 对称加密:使用相同的密钥进行加密和解密。适合数据量大和速度要求快的场合。
- 非对称加密:使用一对密钥,即公钥和私钥。公钥可以公开,适合在不安全的网络中传输数据。
- 哈希加密:对数据进行单向加密,生成固定长度的数据摘要。常用于验证数据的完整性和一致性。
在实际应用中,我们可能会结合使用以上几种加密方法,以达到最佳的安全效果。例如,在充电桩通信中,可以使用非对称加密交换对称密钥,然后用对称密钥加密控制指令,最后用哈希加密来验证数据的完整性。
```python
from cryptography.hazmat.backends import default_backend
from cryptography.hazmat.primitives.asymmetric import rsa
from cryptography.hazmat.primitives import hashes
# 生成非对称密钥对
private_key = rsa.generate_private_key(
public_exponent=65537,
key_size=2048,
backend=default_backend()
)
public_key = private_key.public_key()
# 加密数据
data = b"Hello, World"
encrypted_data = public_key.encrypt(
data,
padding.OAEP(
mgf=padding.MGF1(algorithm=hashes.SHA256()),
algorithm=hashes.SHA256(),
label=None
)
)
# 哈希加密数据以验证其完整性
digest = hashes.Hash(hashes.SHA256(), backend=default_backend())
digest.update(data)
digest_value = digest.finalize()
```
在上述代码中,我们首先生成了一个非对称密钥对,然后用公钥加密了一条消息。接着,我们使用哈希函数对原始数据进行哈希处理,以此来验证加密前后的数据一致性。
### 4.3.2 防篡改和身份验证机制
身份验证机制可以确保消息的发送者是被授权的用户,防止未授权的用户对系统进行操作。同时,防篡改机制可以确保数据在传输过程中未被修改。
常用的身份验证机制包括:
- 密码/口令:用户通过输入预设的密码进行身份验证。
- 数字证书:使用数字证书对用户的身份进行验证。
- 双因素认证:结合密码和物理令牌或生物识别技术,提高安全性。
防篡改机制包括:
- 数字签名:发送者使用私钥对数据进行签名,接收者使用对应的公钥验证签名。
- 完整性校验:例如使用哈希函数生成数据摘要,以校验数据是否被篡改。
在实现这些机制时,我们可能需要结合硬件和软件的多个层面来进行。例如,在硬件层面,可以通过硬件加密模块来处理加密和签名操作;在软件层面,则需要实现身份验证逻辑和数据校验逻辑。
综上所述,实现安全的消息处理策略需要综合考虑多种技术和措施,并将其合理地集成到系统的各个层面。通过以上实践应用的讨论,我们可以看到,智能控制系统中的消息处理策略是确保系统稳定、安全、高效运行的关键。
# 5. 充电桩智能控制系统的通信实现
## 5.1 硬件接口与通信协议
### 5.1.1 控制器接口规范
在充电桩智能控制系统中,控制器接口规范是确保硬件组件能够顺畅通信的基础。这一规范定义了不同硬件组件之间的物理和电气接口标准,例如,电源线、通信线、控制信号线以及它们的连接方式和参数。对于充电桩设备,通常需要关注以下几个方面的接口规范:
1. **充电接口**:充电插口必须符合相应的安全标准,如IEC 62196或SAE J1772,以确保充电设备与电动汽车之间的兼容性和安全性。
2. **控制信号接口**:控制器与辅助设备(如显示屏、计费系统、安全监控设备)之间的信号传输通常需要符合一定的电气标准,如RS-232、RS-485、CAN等。
3. **电源接口**:控制器的电源接口需要支持宽电压输入,并且应具备过电压保护和电源质量监控机制。
4. **通信接口**:控制器需要支持至少一种通信协议,如Modbus、TCP/IP、Wi-Fi等,以实现与远程监控系统的通信。
### 5.1.2 通信协议的选择和配置
通信协议的选择和配置对充电桩智能控制系统至关重要。正确选择的协议能够确保信息的高效、稳定传输。常见的通信协议包括:
- **Modbus**:这是一种广泛应用的串行通信协议,适合于单主设备对多个从设备的控制和监控。
- **TCP/IP**:TCP/IP协议套件允许设备通过网络连接,并在远距离上进行稳定的数据交换。
- **OPC UA**:用于工业自动化中的平台无关的数据交换协议,提供了丰富的通信模式和安全机制。
在配置通信协议时,需要详细定义网络参数,包括但不限于IP地址、端口号、子网掩码、网关、DNS服务器等。此外,考虑到网络安全,还应设置相应的安全认证和加密措施,如TLS/SSL加密、IPSec等。
#### 代码块示例:配置充电桩控制器的TCP/IP网络参数
```bash
# 假设使用Linux系统,为充电桩控制器配置静态IP地址
sudo ifconfig eth0 192.168.1.10 netmask 255.255.255.0 up
sudo route add default gw 192.168.1.1 eth0
sudo echo "nameserver 8.8.8.8" >> /etc/resolv.conf
sudo echo "nameserver 8.8.4.4" >> /etc/resolv.conf
```
#### 参数说明:
- `eth0`:网络接口名称,在实际情况中可能会有所不同。
- `192.168.1.10`:充电桩控制器的静态IP地址。
- `255.255.255.0`:子网掩码,用于定义网络的大小。
- `192.168.1.1`:默认网关的IP地址。
- `8.8.8.8` 和 `8.8.4.4`:Google的公共DNS服务器地址,用于域名解析。
在配置网络参数之后,还需要确保充电桩控制器能够使用所选的通信协议进行数据传输。通常,这需要对控制器固件进行编程或在控制器上安装适当的软件模块。开发者可能需要编写代码,实现网络数据的封装、传输和解析等操作。
## 5.2 软件架构设计
### 5.2.1 分布式架构的考量
随着充电桩网络的不断扩大,分布式架构成为了充电桩智能控制系统设计的一个重要考量。分布式架构允许系统将计算任务分布在多个物理位置,以提高系统的可扩展性、容错性和维护性。
在设计分布式架构时,关键点包括:
1. **服务的拆分**:将复杂的业务逻辑拆分为多个独立的服务模块,每个模块负责一个或一组特定的功能。
2. **通信机制**:定义服务之间交互的通信机制,如同步调用、异步消息等。
3. **状态管理**:明确系统中不同服务状态的管理方式,以及如何在分布式环境中保持状态的一致性。
4. **资源调配**:实现动态资源管理,根据负载情况动态增减计算资源。
5. **数据存储**:选择合适的数据存储方案,如分布式数据库,确保数据的高可用性和一致性。
#### Mermaid流程图示例:分布式充电桩控制系统架构
```mermaid
graph TD
A[客户端] -->|请求| B[网关]
B -->|分发| C[认证服务]
B -->|分发| D[计费服务]
B -->|分发| E[监控服务]
C -->|响应| B
D -->|响应| B
E -->|响应| B
B -->|数据| F[数据库]
F -->|数据| E
```
在这个流程图中,客户端请求通过网关分发给不同的服务模块,每个模块处理完毕后将响应返回给网关,网关再将最终响应返回给客户端。服务模块和数据库之间的数据流展示了系统的数据管理方式。
### 5.2.2 模块化设计与接口定义
模块化设计的核心在于将复杂系统分解为一系列可重用、可替换的模块。每个模块专注于一项特定功能,并通过定义清晰的接口与其他模块交互。
模块化设计的好处包括:
1. **提高可维护性**:由于模块之间耦合度低,单个模块的修改或替换不会影响整个系统。
2. **促进团队协作**:开发人员可以独立工作于不同模块,减少了协作的复杂性。
3. **加快开发速度**:模块化开发促进了代码的复用,可以缩短开发周期。
4. **便于测试**:模块化的系统更容易进行单元测试和集成测试。
在接口定义方面,需要明确每个模块的输入和输出规范,包括数据类型、数据结构、错误代码等。例如,一个典型的模块接口定义可能包含:
- **模块名称**:标识模块的唯一名称。
- **版本号**:用于区分接口的变化。
- **输入参数**:列出所有输入参数的名称、类型、是否必选等。
- **输出结果**:定义输出的数据结构,例如JSON或XML格式。
- **错误处理**:定义可能的错误返回代码及其含义。
## 5.3 系统集成与测试
### 5.3.1 集成过程中的关键问题
系统集成是将所有独立开发的模块组合成一个协调一致的系统的过程。在充电桩智能控制系统的集成过程中,关键问题主要包括:
1. **兼容性问题**:确保不同硬件和软件模块之间能够无缝集成。
2. **数据一致性**:在数据流通过不同模块时保持数据的一致性和准确性。
3. **实时性能**:保证系统能够满足实时性要求,如实时监控和故障响应。
4. **安全性考虑**:保护系统免受未经授权的访问和数据泄露。
为了有效解决这些问题,通常需要一个清晰的集成计划,详细定义每个阶段的工作内容、责任分配和完成时间。在实际操作中,采用敏捷开发方法进行迭代开发和测试是一个常见的做法,这可以帮助团队及时发现和解决问题,减少集成过程中出现的错误。
### 5.3.2 系统测试方法和标准
系统测试是对整个集成后的系统进行全面检查的过程,其目的是验证系统是否满足设计规范和用户需求。在充电桩智能控制系统中,测试方法通常包括:
- **单元测试**:对单个模块的功能进行测试,确保模块按预期工作。
- **集成测试**:测试模块之间的交互是否正常,数据是否能够正确传递。
- **性能测试**:模拟高负载情况,验证系统的响应时间和处理能力。
- **安全测试**:检查系统的安全性,如是否有漏洞、是否可以抵御攻击等。
在进行系统测试时,需要遵循一套既定的标准和流程,以确保测试结果的准确性和可靠性。测试标准可能包括:
- **测试覆盖率**:确保测试覆盖所有模块和代码路径。
- **测试用例**:设计一组全面的测试用例,包含各种可能的使用场景。
- **缺陷跟踪**:记录并跟踪测试过程中发现的每个缺陷,确保缺陷能够得到妥善处理。
#### 代码块示例:充电桩性能测试脚本片段
```python
import requests
def performance_test(charge_point_id):
url = f'http://chargepoints.example.com/api/charge_point/{charge_point_id}/status'
try:
response = requests.get(url, timeout=5)
response.raise_for_status()
print(f"Charge Point {charge_point_id} is online!")
except requests.HTTPError as http_err:
print(f"HTTP error occurred: {http_err}")
except Exception as err:
print(f"An error occurred: {err}")
# 假设有一个充电桩ID列表
charge_points = [1, 2, 3, 4, 5]
for point_id in charge_points:
performance_test(point_id)
```
这个代码片段使用了Python的requests库来对每个充电桩的状态进行查询。它定义了一个性能测试函数,该函数尝试连接到每个充电桩的API,验证充电桩是否在线,并记录下来每个充电桩的状态。通过运行这个脚本,可以对整个充电网络的性能进行全面检查。
# 6. 案例研究与未来展望
在探讨了充电桩智能控制与通信的理论基础、实践应用以及系统实现之后,我们将通过具体案例来深入分析这些概念是如何落地实施的,并对未来的演进方向进行展望。
## 6.1 具体案例分析
### 6.1.1 成功案例的系统架构与实施
在具体的案例中,我们可以看到成功的充电桩智能控制系统是如何构建的。以下是一个典型的系统架构图,它展示了整个系统的关键组件和它们之间的交互关系。
```mermaid
graph TD
A[客户端设备] --> B[智能充电桩]
B --> C[通信网络]
C --> D[管理系统]
D --> E[数据库服务器]
```
在实际的实施过程中,系统首先进行需求分析,包括对充电需求、用户行为、充电安全性等方面的考虑。接着,设计阶段开始,细化系统架构,并选择合适的硬件和软件组件。开发阶段涉及到编程与配置工作,确保系统的稳定运行和良好的用户体验。测试阶段则会模拟各种场景,包括正常操作、异常处理以及极端条件下的表现,确保系统的鲁棒性。最终,系统部署并进入运维阶段,持续监控系统运行状态,进行必要的维护和优化。
### 6.1.2 案例中的问题与解决方案
在案例实施过程中,常见问题包括系统集成的复杂性、数据通信的安全性和可靠性、以及用户的充电体验等。解决方案可能包括:
- **系统集成问题**:采用模块化设计,逐步集成各个子系统,通过标准化接口来简化集成过程。
- **数据通信安全**:引入加密和认证机制,如SSL/TLS协议,确保数据传输的机密性和完整性。
- **用户充电体验**:提供友好的用户界面,设计智能调度算法,优化充电等待时间,提供实时反馈和状态更新。
## 6.2 未来技术发展趋势
### 6.2.1 智能控制技术的演进方向
随着技术的进步,智能控制技术将向更加自动化、智能化方向发展。例如,使用机器学习算法来预测充电需求,从而更高效地调度资源。在物联网技术的推动下,设备之间将更智能地进行通信和协同工作。
### 6.2.2 消息处理策略的创新路径
在消息处理策略方面,未来的创新将集中在提高消息处理的速度和准确性上。例如,通过采用边缘计算技术,在数据产生的地点即时处理消息,减少延迟并提升效率。此外,探索消息处理算法的优化,如引入先进的队列管理算法,以提高系统的吞吐量和响应时间。
通过这些案例研究与未来展望,我们可以清晰地看到充电桩智能控制与通信技术的过去、现在与未来。这些技术和策略不仅适用于充电桩行业,还能为其他行业的智能控制与通信提供宝贵的参考。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 DIN 70121 标准在充电桩海外应用中的重要性。它从战略层面分析了 DIN 70121 在充电桩国际化中的作用,并深入研究了该标准下的消息处理策略。专栏还提供了 DIN 70121 与其他标准的对比分析,以及在网络架构、消息传输和协议测试方面的优化策略。此外,它还提供了 DIN 70121 标准的实践指南和案例分析,以及提升运营效率的故障诊断和处理策略。通过这些文章,本专栏旨在为充电桩行业提供全面的指南,帮助他们了解和应用 DIN 70121 标准,从而实现充电桩的全球化发展。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
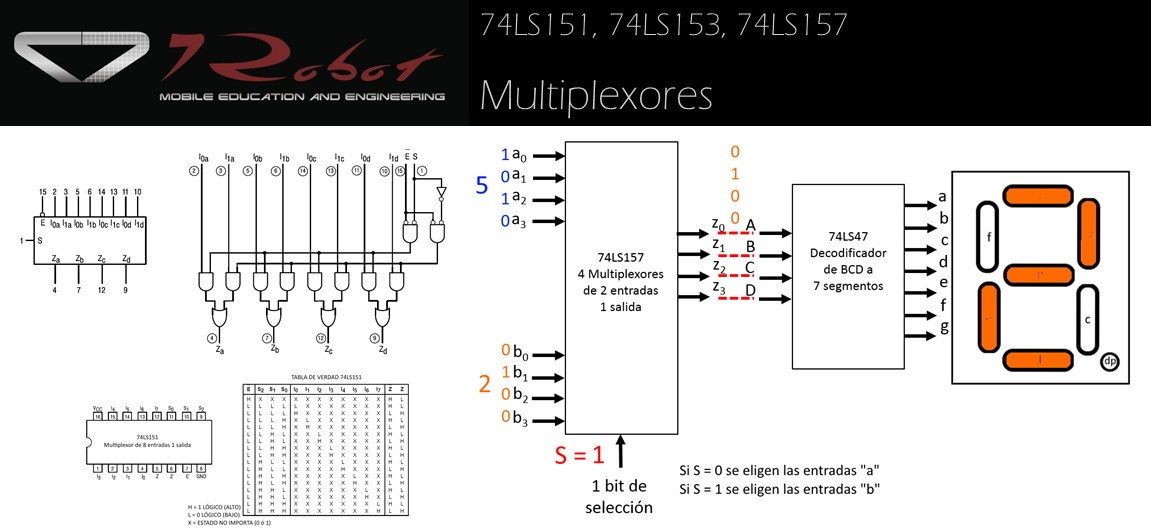
揭秘74LS138译码器:9大管脚功能与20个应用场景全解析
# 摘要
本论文深入探讨了74LS138译码器的基础知识、管脚功能、应用电路及实际项目中的应用。首先,对74LS138译码器进行了基础介绍,详细解析了其管脚功能,包括电源、输入、输出管脚的作用和特点。随后,通过具体的应用电路分析,探讨了译码器的基本译码功能、扩展功能的应用,以及防抖动与信号同步处理。此外,论文还着重论述了74LS138译码器在微处理器接口、数码管与LED显示、可编程逻辑控制器等实际项目中的应用。最后,分析
Linux文件系统完整性守护:避免空间不足错误的终极秘籍
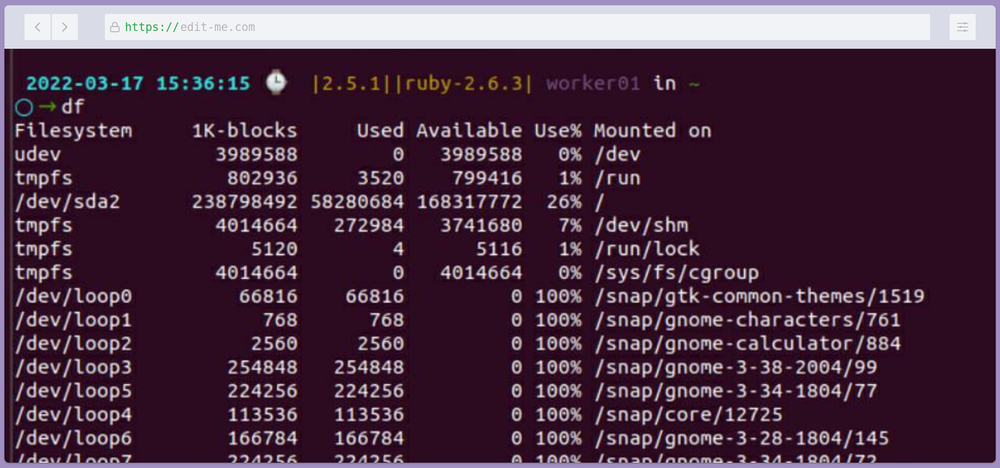
# 摘要
本文全面探讨了Linux文件系统和空间管理的基础知识、重要性以及如何预防和应对空间不足的问题。首先,阐述了文件系统完整性对系统稳定性的重要性,随后深入讨论了预防空间不足的理论和策略,包括磁盘配额机制的原理与应用,自动化磁盘清理过程,以及逻辑卷管理(LVM)的使用。接着,文章详细介绍了空间不足错误的应急处理方法,包括错误的定位、诊断及临时和长期的解决方案。此外,本文还介绍了
C#字符编码识别与转换基础
# 摘要
字符编码是计算机科学中处理文本信息的基础技术,对于数据的存储和交换至关重要。本文首先介绍了字符编码的概念、历史发展和常见标准,随后深入探讨了C#中字符编码的支持和字符与字节的转换原理。第三章重点阐述了在C#中如何识别和转换文件编码,以及处理编码转换中常见问题的方法。第四章分析了字符编码在C#中的进阶应用,包括编码转换工具的设计实现、国际化与本地化编码需求的处理,以及特定编码转换场景的策略。最后,第五章提出了字符编码转换的最佳实践和性能优化方法,为开发者在进行字符编码相关工作时提供了指导和参考。本文旨在帮助读者全面掌握字符编码的相关知识,提升编码转换的效率和可靠性。
# 关键字
字符
数字电路设计基础:课后习题答案与设计思路
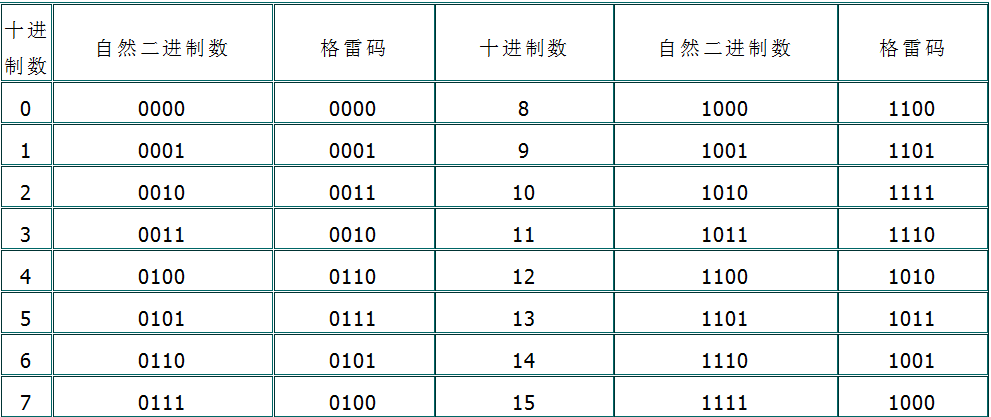
# 摘要
数字电路设计是现代电子工程的核心组成部分,涉及基础概念理解、习题解析、设计工具应用以及综合设计案例分析等多个方面。本文通过回顾数字电路设计的基础知识,详细解析了各种题型,并探讨了如何在课后习题中串联知识点。同时,介绍了数字电路设计工具及其应用技巧,如电路仿真软件、硬件描述语言和芯片编程。此外,本文还提供了综合设计案例的分析,以及如何拓展设计思路与优化。最后,概述了数字电路设计的进阶
CAM350拼板流程全解析:成为专业拼板师的秘诀
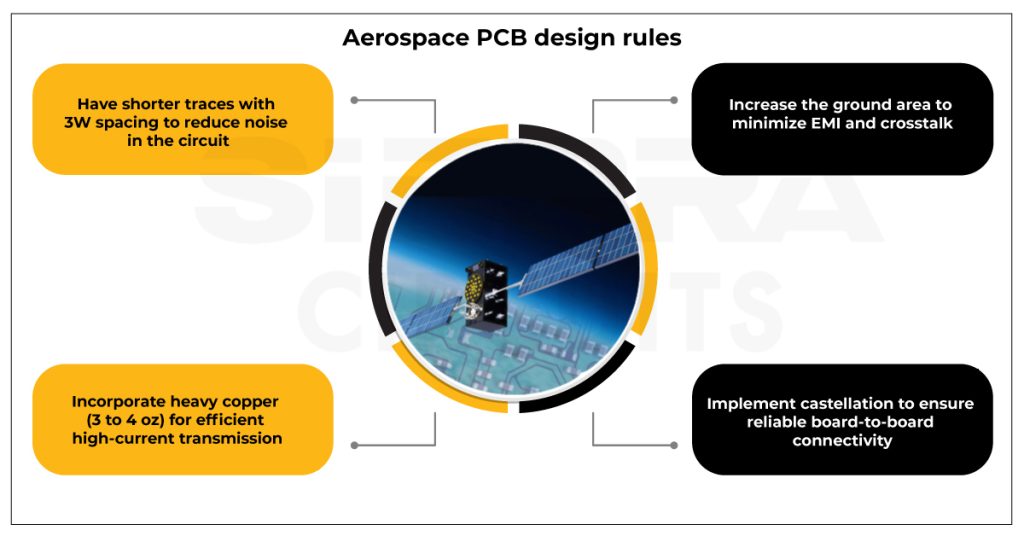
# 摘要
本文详细介绍了CAM350拼板软件的操作界面布局、基本操作、参数设置,以及高级拼板技巧和工艺。通过对CAM350软件的基本功能与操作流程的深入解析,展示了如何高效利用软件进行拼板设计、自动化操作和数据管理。进一步探讨了在实际应用中如何应对拼板设计过程中的常见问题,并提供了实践案例分析。同时,本论文也对CAM350的高级功能和与其他软件的
NE555故障诊断手册:快速解决你的电路问题
# 摘要
NE555集成电路因其多功能性和高可靠性广泛应用于定时、振荡和信号处理等领域。本文系统介绍了NE555的基本工作原理和特性,包括其工作模式、电气特性以及时间与频率的计算方法。通过对NE555故障诊断流程的详述,包括准备工作、快速识别和实践操作,文章进一步探讨了常见故障类型及相应的解决方法。最后,本文提供了故障修复技巧、预防措施和应用案例分析,旨在指导工程师进行有效的电路维护和故障排除。NE555的深入了解有助于提高电子系
【DS402协议全能攻略】:5个关键步骤精通CANopen通信标准

# 摘要
本文对DS402协议与CANopen通讯技术进行了全面介绍和分析。首先概述了DS402协议在CANopen通信中的作用及其与CANopen的关联,然后探讨了CANopen网络架构和设备对象模型,以及通信协议栈的结构和数据处理。接着,文章详细阐述了如何在实际应用中配置和实现DS402协议,包括设定通信参数、控制和监控驱动器,以及分析了具体案例
IBM Rational DOORS敏捷之旅:如何在敏捷环境中实现高效迭代管理
# 摘要
敏捷开发作为一种灵活且迭代的项目管理方法,近年来已与Rational DOORS这一需求管理工具紧密结合,以提高项目团队的效率和透明度。本论文首先介绍了敏捷开发的基本原则,并将其与传统方法进行对比分析,随后探讨了Rational DOORS在敏捷流程中如何管理和优先级划分需求、支持迭代规划与团队协作。文章深入分析了Rational DOORS在敏捷转型中的应用,讨论了其在需求编
【HFSS雷达分析:频率响应与脉冲压缩】:深入理解多普勒测速雷达的性能关键

# 摘要
本论文围绕HFSS雷达分析的基础理论与实践应用展开,详细探讨了频率响应理论、脉冲压缩技术以及多普勒效应在雷达系统性能中的关键作用。通过对HFSS软件功能和特点的介绍,本文阐述了如何运用高频结构仿真软件进行雷达频率响应的仿真分析,并进一步分析了脉冲压缩技术的实现及性能评估。此外,研究了多普勒效应在雷达中的应用及其对测速雷达性能的影响,通过案例研究展示了虚拟测试环境的建立和多
【FANUC机器人必备技能】:5步带你走进工业机器人世界
# 摘要
本文系统介绍了FANUC机器人的全面知识,涵盖了基础操作、维护保养、高级编程技术和实际应用场景等方面。从控制面板的解读到基本运动指令的学习,再到工具和夹具的使用,文章逐步引导读者深入了解FANUC机器人的操作逻辑和安全实践。在此基础上,本文进一步探讨了日常检查、故障诊断以及保养周期的重要性,并提出了有效的维护与保养流程。进阶章节着重介绍了FANUC机器人在编程方面的深入技术,如路径规划、多任务处
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )