STM32F407无线通信
发布时间: 2024-12-01 03:58:06 阅读量: 4 订阅数: 13 
参考资源链接:[STM32F407中文手册:ARM内核微控制器详细指南](https://wenku.csdn.net/doc/6412b69dbe7fbd1778d475ae?spm=1055.2635.3001.10343)
# 1. STM32F407无线通信概述
STM32F407微控制器因其高性能和丰富的外设而广受工程师青睐,尤其在需要无线通信功能的嵌入式系统中。通过集成先进的无线通信技术,如Wi-Fi、蓝牙和ZigBee,STM32F407能够实现与远程设备或网络的高效数据交换。本章将简要介绍无线通信的基本概念及其在STM32F407中的应用概况,为后续章节深入探讨不同无线技术的实现和优化打下基础。
# 2. STM32F407的基础知识和无线通信原理
## 2.1 STM32F407微控制器概述
### 2.1.1 STM32F407的架构和特性
STM32F407微控制器是ST公司生产的一款高性能ARM Cortex-M4系列的32位微控制器。它拥有168 MHz的最大CPU频率,以及高达1MB的闪存和192 KB的SRAM存储容量。其丰富的外设接口,包括USB OTG全速/高速接口、以太网接口、CAN接口、12位ADC和DAC等,为开发者提供了灵活的设计空间。
该微控制器具有高性能的数字信号处理能力,内嵌了单周期的MAC(乘法累加器)单元,使其在处理数字信号算法时,如FFT(快速傅里叶变换)等,能够以最小的资源开销达到较高的性能。另外,它的低功耗模式和睡眠模式使得它适合于电池供电的应用场景。
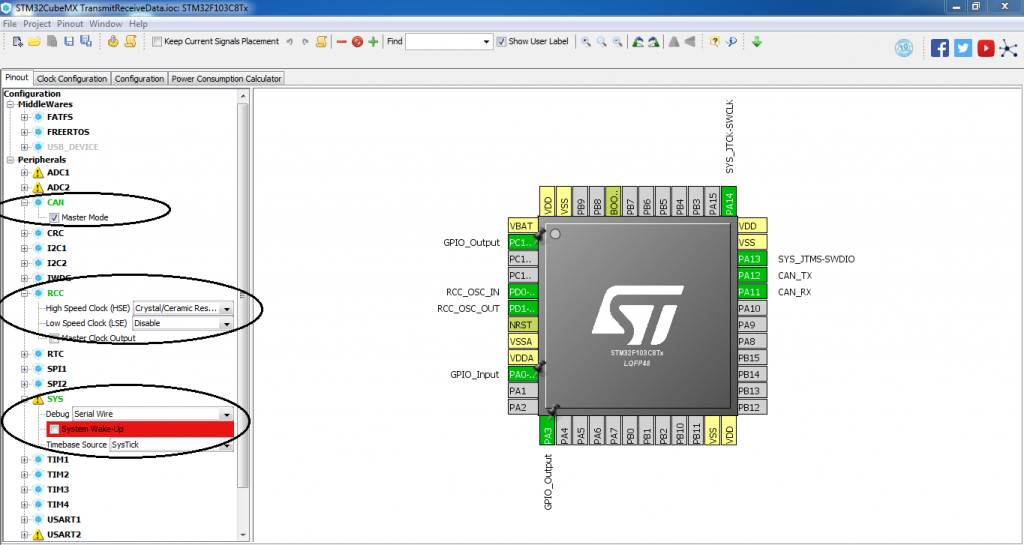
### 2.1.2 STM32F407的开发环境和工具
为了支持STM32F407的开发,ST公司提供了全面的开发工具套件,其中最为主要的是STM32CubeMX和STM32CubeIDE。STM32CubeMX是一个图形化配置工具,可以帮助开发者配置微控制器的各个参数,生成初始化代码。而STM32CubeIDE是一个集成了调试器、代码编辑器和性能分析工具的综合开发环境,支持嵌入式C/C++应用开发。
除此之外,为了实现无线通信功能,开发者还需要使用一些专用的无线模块,例如ESP8266 Wi-Fi模块、HC-05蓝牙模块和CC2530 ZigBee模块等,以及相关的开发板和外围设备。这些模块和工具的合理选择和使用,可以大大提升开发效率和产品的性能。
## 2.2 无线通信技术基础
### 2.2.1 无线通信的基本概念和分类
无线通信是指通过无线电磁波在空间中传输信息的技术。基本的无线通信系统由发射机和接收机组成,发射机将信号调制到高频电磁波上,通过天线发射出去;接收机通过天线接收信号,然后将信号解调下来还原为信息。
无线通信按照不同的标准可以有多种分类方式,按照传输距离可以分为短距离无线通信(如蓝牙、ZigBee)和长距离无线通信(如Wi-Fi、蜂窝网络)。按照应用场景又可以分为个人局域网(PAN)、局域网(LAN)和广域网(WAN)。不同类型的无线通信技术在传输速率、功耗、覆盖范围等方面各有优势和局限。
### 2.2.2 主要无线通信标准和技术指标
无线通信领域内,目前应用最广泛的标准包括Wi-Fi(IEEE 802.11)、蓝牙(Bluetooth)、ZigBee(IEEE 802.15.4)、LoRa等。这些标准的技术指标包括但不限于以下几点:
- **工作频率**:决定了通信波段和抗干扰能力,例如2.4GHz和5GHz是Wi-Fi常用的频率段。
- **传输速率**:决定了数据传输的快慢,如Wi-Fi 6理论上可以达到9.6Gbps。
- **功耗**:直接影响设备的续航能力,例如蓝牙低功耗(BLE)专门为了低功耗设计。
- **覆盖范围**:决定了通信距离,如ZigBee适合构建家庭和办公室的智能家居网络。
了解这些技术指标对于无线通信系统的设计至关重要,因为它直接影响到无线模块的选择和整个系统的性能评估。
## 2.3 STM32F407与无线模块的接口技术
### 2.3.1 SPI和UART通信协议
在无线通信的实现过程中,STM32F407与无线模块间的数据交互通常通过串行通信协议来完成,其中较为常用的是SPI(Serial Peripheral Interface)和UART(Universal Asynchronous Receiver/Transmitter)。
- **SPI协议**:SPI协议是一种高速的,全双工的通信协议。它使用四条线:SCK(时钟线)、MISO(主设备输入从设备输出线)、MOSI(主设备输出从设备输入线)和CS(片选线)。SPI允许在主设备和一个或多个从设备之间进行数据传输。它通常用于近距离且高速的数据交互,如与无线模块进行配置信息的交换。
- **UART协议**:UART是一种简单的异步串行通信协议,使用两条线(RX和TX)进行全双工通信。UART通信不需要共享时钟信号,允许设备间在不同的时钟频率下工作。其主要优势在于简单易用,广泛应用于长距离数据传输。比如通过蓝牙模块与STM32F407进行数据交换。
### 2.3.2 GPIO和中断控制技术
除了SPI和UART,通用输入输出端口(GPIO)和中断控制技术在无线通信的实现中也扮演着重要角色。
- **GPIO**:GPIO端口在无线通信应用中广泛用于控制无线模块的电源,复位,以及某些特殊功能。例如,将某个GPIO引脚配置为输出模式,用于控制无线模块的电源开关。
- **中断控制技术**:在无线通信过程中,常常需要处理来自无线模块的事件,如接收到数据或者发生错误时的信号。中断控制技术允许STM32F407在无需不断轮询检测的情况下响应这些事件。通过配置中断服务程序,STM32F407可以在事件发生时立即响应并执行相应的处理程序。
```c
// 代码示例:配置GPIO和中断
#define WirelessModulePowerPin GPIO_Pin_0 // 假设使用GPIO端口的第0号引脚控制无线模块电源
#define WirelessModuleResetPin GPIO_Pin_1 // 假设使用GPIO端口的第1号引脚复位无线模块
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOx, ENABLE); // x为对应的GPIO端口编号,启用时钟
GPIO_InitStructure.GPIO_Pin = WirelessModulePowerPin | WirelessModuleResetPin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; // 设置为输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; // 不使用上拉或下拉电阻
GPIO_Init(GPIOx, &GPIO_InitStructure); // 初始化
}
void EXTI_Configuration(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE); // 使能SYSCFG时钟
// 配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 设置NVIC中断分组2
NVIC_InitStructure.NVIC_IRQChannel = EXTIx_IRQn; // x为对应的中断通道号
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 配置EXTI
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOx, EXTI_PinSourcex); // x为对应的GPIO端口和引脚源
EXTI_InitStructure.EXTI_Line = EXTI_Linex; // x为对应的中断线号
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // 设置为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling; // 上升沿和下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; // 使能EXTI线
EXTI_Init(&EXTI_InitStructure);
}
```
在上述代码中,我们首先通过`GPIO_Configuration`函数配置了两个GPIO引脚作为无线模块的电源控制和复位信号。随后,在`EXTI_Configuration`函数中配置了外部中断,以便STM32F407可以在无线模块有特定事件发生时进行处理。
通过GPIO和中断控制技术,STM32F407能够高效地管理与无线模块的交互,从而构建稳定可靠的无线通信系统。
```mermaid
flowchart LR
A[STM32F407] -->|配置GPIO| B[无线模块电源控制]
A -->|配置GPIO| C[无线模块复位]
A -->|配置中断| D[响应无线模块事件]
```
上述mermaid流程图展示了STM32F407如何使用GPIO和中断技术来控制无线模块的电源、复位以及响应无线模块事件。
在本节中,我们深入了解了STM32F407微控制器的架构和特性,以及与无线模块通信所必须掌握的接口技术,包括SPI和UART协议,GPIO和中断控制技术。这些知识为后续章节中基于STM32F407实现无线通信打下了坚实的基础。在接下来的章节中,我们将具体探讨如何将这些知识应用到实践中,实现基于Wi-Fi、蓝牙和ZigBee等技术的通信应用。
# 3. STM32F407无线通信实践应用
## 3.1 基于Wi-Fi的通信应用
### 3.1.1 Wi-Fi模块的选择和连接
Wi-Fi模块是实现STM32F407无线通信中接入互联网的关键组件。选择合适的Wi-Fi模块对于项目的成功至关重要。市场上有许多可用的Wi-Fi模块,但在STM32F407的应用中,我们通常选择ESP8266或ESP32这类低成本且功能强大的Wi-Fi芯片。
连接Wi-Fi模块与STM32F407通常通过UART接口完成。STM32F407的USART(通用同步/异步收发器)接口支持全双工通信,并具有独立的接收器和发送器,能够与Wi-Fi模块实现无缝连接。
在连接过程中,需要按照数据手册设置正确的波特率、数据位、停止位和校验位参数。例如,ESP8266模块在AT指令模式下通常需要115200波特率,无奇偶校验,1个停止位,8个数据位。
```c
// 示例代码:初始化USART并连接ESP8266模块
void USART2_Init(void)
{
// 使能USART2和GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//USART2 TX -> PA2, RX -> PA3
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_O
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 STM32F407 中文手册为基础,全面介绍了 STM32F407 微控制器的各个方面。专栏内容涵盖了从基础教程到高级应用的广泛主题,包括:
* 系统启动流程
* 时钟系统配置
* 中断管理
* 存储解决方案
* 低功耗模式
* ADC/DAC 转换
* 定时器高级应用
* 图形显示
* 以太网通信
* USB 通信接口
* 音频处理
* 传感器集成指南
* 安全特性应用
* 裸机编程指南
本专栏旨在为工程师和爱好者提供一个全面的资源,帮助他们深入了解 STM32F407 微控制器,并充分利用其强大的功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【生物信息学基因数据处理】:Kronecker积的应用探索
参考资源链接:[矩阵运算:Kronecker积的概念、性质与应用](https://wenku.csdn.net/doc/gja3cts6ed?spm=1055.2635.3001.10343)
# 1. 生物信息学中的Kronecker积概念介绍
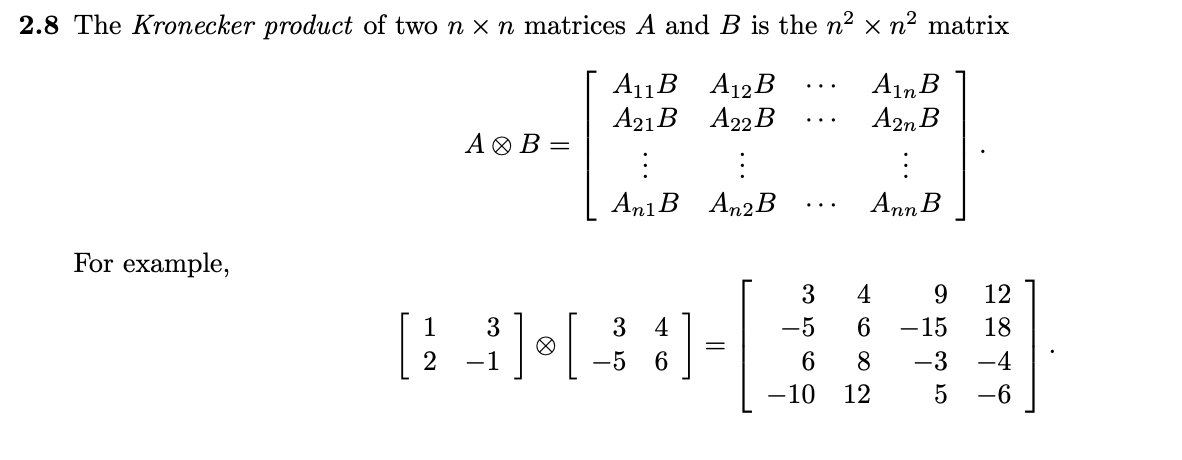
## 1.1 Kronecker积的定义
在生物信息学中,Kronecker积(也称为直积)是一种矩阵
3-matic 9.0案例集锦】:从实践经验中学习三维建模的顶级技巧
参考资源链接:[3-matic9.0中文操作手册:从输入到分析设计的全面指南](https://wenku.csdn.net/doc/2b3t01myrv?spm=1055.2635.3001.10343)
# 1. 3-matic 9.0软件概览
## 1.1 软件介绍
3-matic 9.0是一款先进的三维模型软件,广泛应用于工业设计、游戏开发、电影制作等领域。它提供了一系列的建模和优化工具,可以有效地处理复杂的三维模型,提高模型的质量和精度。
## 1.2 功能特点
该软件的主要功能包括基础建模、网格优化、拓扑优化以及与其他软件的协同工作等。3-matic 9.0的用户界面直观易用,
【HLW8110物联网桥梁】:构建万物互联的HLW8110应用案例
参考资源链接:[hlw8110.pdf](https://wenku.csdn.net/doc/645d8bd295996c03ac43432a?spm=1055.2635.3001.10343)
# 1. HLW8110物联网桥梁概述
## 1.1 物联网桥梁简介
HL
开发者必看!Codesys功能块加密:应对最大挑战的策略

参考资源链接:[Codesys平台之功能块加密与权限设置](https://wenku.csdn.net/doc/644b7c16ea0840391e559736?spm=1055.2635.3001.10343)
# 1. 功能块加密的基础知识
在现代IT和工业自动化领域,功能块加密已经成为保护知识产权和防止非法复制的重要手段。功能块(Fun
频谱资源管理优化:HackRF+One在频谱分配中的关键作用

参考资源链接:[HackRF One全方位指南:从入门到精通](https://wenku.csdn.net/doc/6401ace3cce7214c316ed839?spm=1055.2635.3001.10343)
# 1. 频谱资源管理概述
频谱资源是现代通信技术不可或缺的一部分
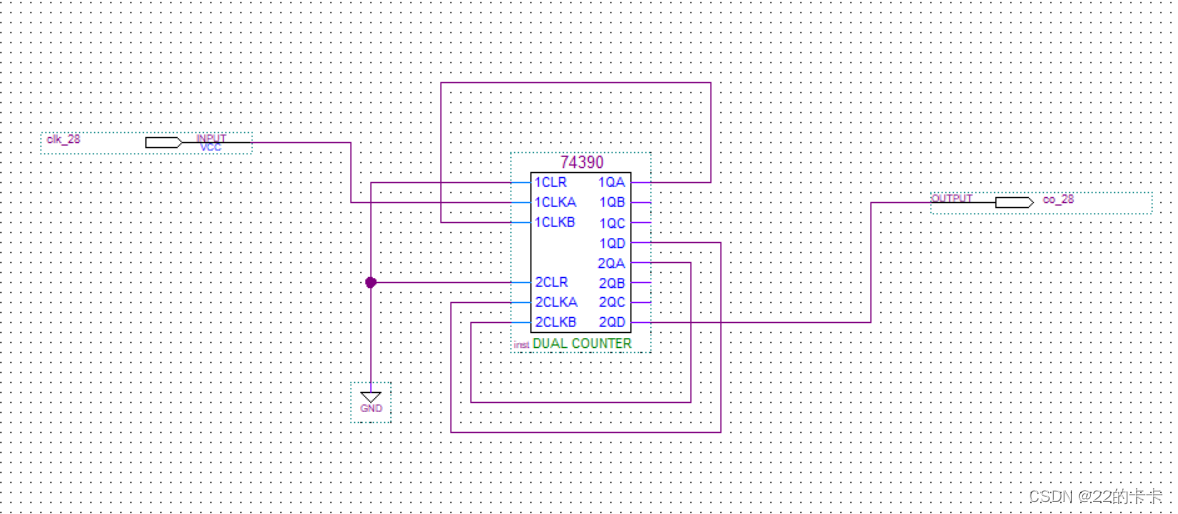
【跨平台协作技巧】:在不同EDA工具间实现D触发器设计的有效协作
参考资源链接:[Multisim数电仿真:D触发器的功能与应用解析](https://wenku.csdn.net/doc/5wh647dd6h?spm=1055.2635.3001.10343)
# 1. 跨平台EDA工具协作概述
随着集成电路设计复杂性的增加,跨平台电子设计自动化(EDA)工具的协作变得日益重要。本章将概述EDA工具协作的基本概念,以及在现代设计环境中它们如何共同工作。我们将探讨跨平台
系统稳定性与内存安全:确保高可用性系统的内存管理策略
参考资源链接:[Net 内存溢出(System.OutOfMemoryException)的常见情况和处理方式总结](https://wenku.csdn.net/doc/6412b784be7fbd1778d4a95f?spm=1055.2635.3001.10343)
# 1. 内存管理基础与系统稳定性概述
内存管理是操作系统中的一个核心功能,它涉及到内存的分配、使用和回收等多个方面。良好的内存管
车载网络安全测试:CANoe软件防御与渗透实战指南
参考资源链接:[CANoe软件安装与驱动配置指南](https://wenku.csdn.net/doc/43g24n97ne?spm=1055.2635.3001.10343)
# 1. 车载网络安全概述
## 1.1 车联网安全的重要性
随着互联网技术与汽车行业融合的不断深入,车辆从独立的机械实体逐渐演变成互联的智能系统。车载网络安全关系到车辆数据的完整性、机密性和可用性,是防止未授权访问和网络攻击的关键。确保车载系统的安全性,可以防止数据泄露、控制系统被恶意操控,以及保护用户隐私。因此,车载网络安全对于现代汽车制造商和用户来说至关重要。
## 1.2 安全风险的多维挑战
车辆的网络连
Paraview数据处理与分析流程:中文版完全指南
参考资源链接:[ParaView中文使用手册:从入门到进阶](https://wenku.csdn.net/doc/7okceubkfw?spm=1055.2635.3001.10343)
# 1. Paraview简介与安装配置
## 1.1 Paraview的基本概念
Paraview是一个开源的、跨平台的数据分析和可视化应用程序,广泛应用于科学研究和工程领域。它能够处理各种类型的数据,包括标量、向量、张量等
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )