单片机交通灯控制系统:算法设计与实现,优化系统性能
发布时间: 2024-07-12 01:34:35 阅读量: 57 订阅数: 37 

单片机交通灯控制系统

# 1. 单片机交通灯控制系统概述
单片机交通灯控制系统是一种利用单片机技术实现交通灯控制的系统,它具有体积小、成本低、可靠性高等优点。单片机交通灯控制系统主要由单片机、外围电路和交通灯组成。
单片机是交通灯控制系统的大脑,它负责控制交通灯的开关和时间。外围电路为单片机提供必要的支持,包括交通灯驱动电路、车流检测电路等。交通灯是系统中最直观的部件,它负责向车辆和行人指示通行或停止。
单片机交通灯控制系统的工作原理如下:单片机根据交通流检测信息,按照预先设定的算法控制交通灯的开关和时间。通过对交通流的实时监测和控制,单片机交通灯控制系统可以有效地优化交通流量,减少拥堵和提高交通效率。
# 2. 交通灯控制算法设计
交通灯控制算法是单片机交通灯控制系统的核心,其设计直接影响系统的性能和效率。本章将介绍两种常用的交通灯控制算法:时序控制算法和自适应控制算法。
### 2.1 时序控制算法
#### 2.1.1 基本原理
时序控制算法是一种基于预先设定的时间周期来控制交通灯的切换。其基本原理是:根据交通流量规律,将一天划分为多个时间段,每个时间段内交通灯的切换时间和顺序都是固定的。
#### 2.1.2 算法实现
时序控制算法的实现主要涉及以下步骤:
1. **交通流量调查:**收集和分析交通流量数据,确定不同时间段的交通流量模式。
2. **时间段划分:**根据交通流量模式,将一天划分为多个时间段,每个时间段对应不同的交通灯切换时间和顺序。
3. **交通灯切换控制:**根据时间段的设定,控制交通灯的切换。
**代码块:**
```c
#define TIME_PERIOD 60 // 时间周期(秒)
#define NUM_TIME_SLOTS 4 // 时间段数量
typedef struct {
uint8_t start_time; // 开始时间(秒)
uint8_t end_time; // 结束时间(秒)
uint8_t traffic_light_sequence[4]; // 交通灯切换顺序
} time_slot_t;
time_slot_t time_slots[NUM_TIME_SLOTS] = {
{0, 15, {GREEN, RED, YELLOW, RED}},
{15, 30, {RED, GREEN, YELLOW, GREEN}},
{30, 45, {YELLOW, RED, GREEN, RED}},
{45, 60, {RED, YELLOW, GREEN, GREEN}}
};
void traffic_light_control() {
uint8_t current_time = 0;
while (1) {
for (int i = 0; i < NUM_TIME_SLOTS; i++) {
if (current_time >= time_slots[i].start_time && current_time < time_slots[i].end_time) {
set_traffic_light_sequence(time_slots[i].traffic_light_sequence);
break;
}
}
current_time++;
if (current_time >= TIME_PERIOD) {
current_time = 0;
}
}
}
```
**逻辑分析:**
该代码块实现了时序控制算法。它定义了一个时间周期(60 秒)和 4 个时间段。每个时间段都有一个开始时间、结束时间和一个交通灯切换顺序。
`traffic_light_control()` 函数是一个无限循环,它不断检查当前时间并根据时间段的设定控制交通灯的切换。
### 2.2 自适应控制算法
#### 2.2.1 车流检测技术
自适应控制算法是一种根据实时交通流量数据来调整交通灯切换时间的算法。其核心技术是车流检测。
常用的车流检测技术包括:
- **感应线圈:**埋设在路面上的线圈,当车辆经过时会产生电磁感应,从而检测到车辆的存在。
- **视频检测:**使用摄像头采集路面图像,通过图像分析来检测车辆。
- **雷达检测:**使用雷达传感器发射电磁波,通过反射信号来检测车辆。
#### 2.2.2 算法设计
自适应控制算法的设计主要涉及以

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了单片机交通灯控制系统的各个方面,从原理到实战,打造智能交通系统。专栏内容涵盖了系统设计与实现、工作原理、故障排除、物联网集成、性能优化、算法设计、嵌入式系统开发、安全性和可靠性考虑、项目管理与实施、成本优化与效益分析、行业应用与案例分享、单片机选型、人机交互与界面设计、数据采集与分析、人工智能与机器学习应用、可扩展性和可维护性设计等主题。通过深入浅出的讲解和实战指南,专栏旨在帮助读者快速掌握单片机交通灯控制系统开发,提升系统效率、稳定性和智能化水平,打造可靠的交通管理系统,提升城市管理效率。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【系统兼容性深度揭秘】:Win10 x64上的TensorFlow与CUDA完美匹配指南
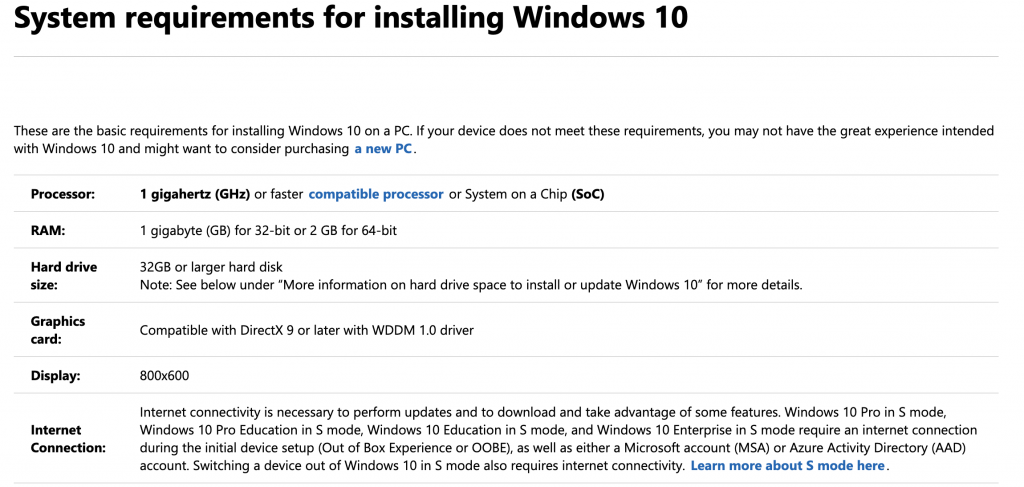
# 摘要
本文详细探讨了在深度学习框架中系统兼容性的重要性,并深入介绍了CUDA的安装、配置以及TensorFlow环境的搭建过程。文章分析了不同版本CUDA与GPU硬件及NVIDIA驱动程序的兼容性需求,并提供了详细的安装步骤和故障排除方法。针对TensorFlow的安装与环境搭建,文章阐述了版本选择、依赖
先农熵数学模型:计算方法深度解析

# 摘要
先农熵模型作为一门新兴的数学分支,在理论和实际应用中显示出其独特的重要性。本文首先介绍了先农熵模型的概述和理论基础,阐述了熵的起源、定义及其在信息论中的应用,并详细解释了先农熵的定义和数学角色。接着,文章深入探讨了先农熵模型的计算方法,包括统计学和数值算法,并分析了软件实现的考量。文中还通过多个应用场景和案例,展示了先农熵模型在金融分析、生物信息学和跨学科研究中的实际应用。最后,本文提出了
【24小时精通电磁场矩量法】:从零基础到专业应用的完整指南

# 摘要
本文系统地介绍了电磁场理论与矩量法的基本概念和应用。首先概述了电磁场与矩量法的基本理论,包括麦克斯韦方程组和电磁波的基础知识,随后深入探讨了矩量法的理论基础,特别是基函数与权函数选择、阻抗矩阵和导纳矩阵的构建。接着,文章详述了矩量法的计算步骤,涵盖了实施流程、编程实现以及结果分析与验证。此外,本文还探讨了矩量法在天线分析、微波工程以及雷达散射截面计算等不同场景的应用,并介绍了高频近似技术、加速技术和
RS485通信原理与实践:揭秘偏置电阻最佳值的计算方法
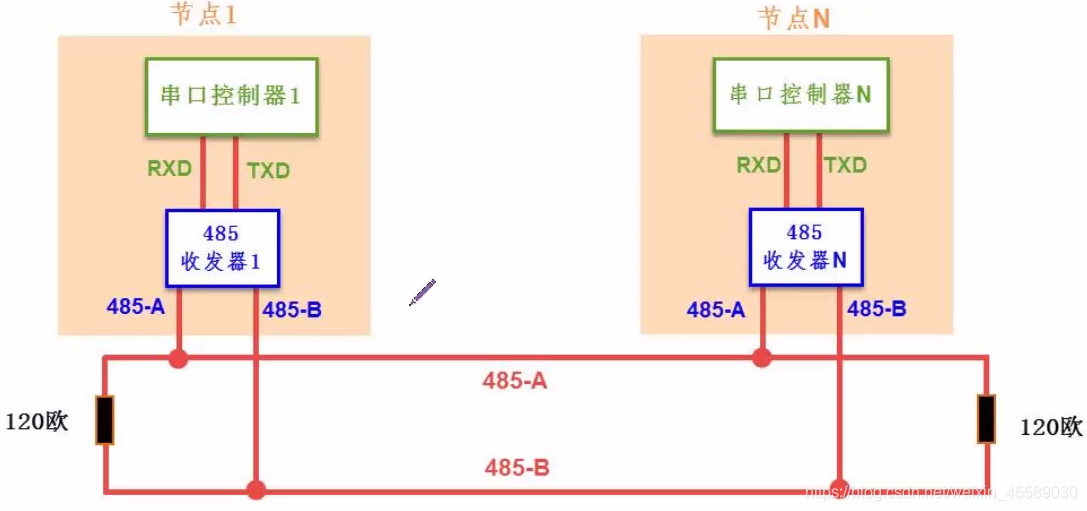
# 摘要
RS485通信作为一种广泛应用的串行通信技术,因其较高的抗干扰能力和远距离传输特性,在工业控制系统和智能设备领域具有重要地位。
【SOEM多线程编程秘籍】:线程同步与资源竞争的管理艺术

# 摘要
本文针对SOEM多线程编程提供了一个系统性的学习框架,涵盖多线程编程基础、同步机制、资源竞争处理、实践案例分析以及进阶技巧,并展望了未来发展趋势。首先,介绍了多线程编程的基本概念和线程同步机制,包括同步的必要性、锁的机制、同步工具的使用等。接着,深入探讨了资源竞争的识别、预防策略和调试技巧。随后
SRIO Gen2在嵌入式系统中的实现:设计要点与十大挑战分析

# 摘要
本文对SRIO Gen2技术在嵌入式系统中的应用进行了全面概述,探讨了设计要点、面临的挑战、实践应用以及未来发展趋势。首先,文章介绍了SRIO Gen2的基本概念及其在嵌入式系统中的系统架构和硬件设计考虑。随后,文章深入分析了SRIO Gen2在嵌入式系统中遇到的十大挑战,包括兼容性、性能瓶颈和实时性能要求。在实践应用方面,本文讨论了硬件设计、软件集成优化以及跨平台部署与维护的策略。最后,文章展望了SRI
【客户满意度提升神器】:EFQM模型在IT服务质量改进中的效果

# 摘要
本论文旨在深入分析EFQM模型在提升IT服务质量方面的作用和重要性。通过对EFQM模型基本原理、框架以及评估准则的阐述,本文揭示了其核心理念及实践策略,并探讨了如何有效实施该模型以改进服务流程和建立质量管理体系。案例研究部分强调了EFQM模型在实际IT服务中的成功应用,以及它如何促进服务创新和持续改进。最后,本论文讨论了应用EFQM模型时可能遇到的挑战,以及未来的发展趋势,包括
QZXing进阶技巧:如何优化二维码扫描速度与准确性?
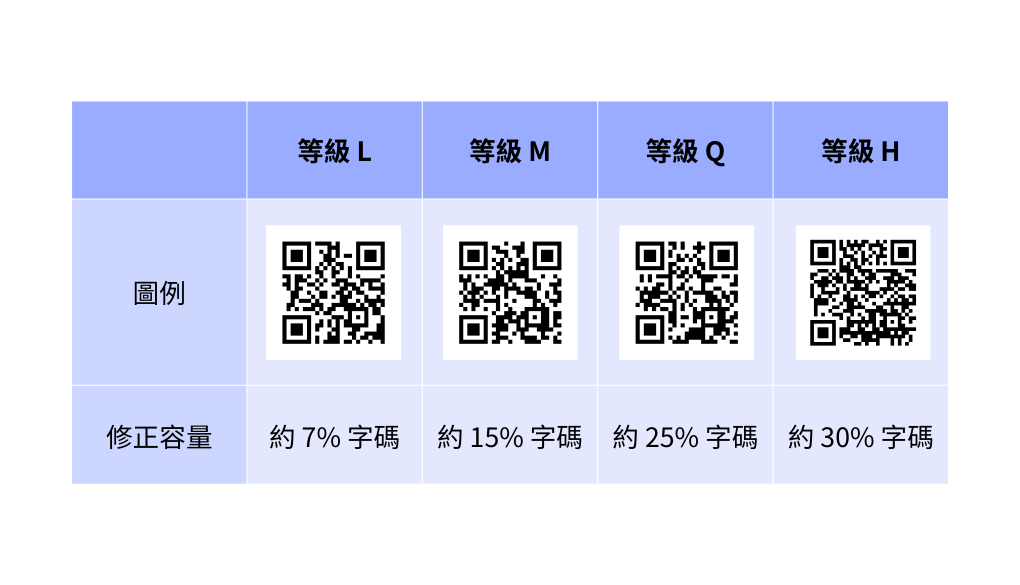
# 摘要
随着移动设备和电子商务的迅速发展,QZXing作为一种广泛应用的二维码扫描技术,其性能直接影响用户体验。本文首先介绍了QZXing的基础知识及其应用场景,然后深入探讨了QZXing的理论架构,包括二维码编码机制、扫描流程解析,以及影响扫描速度与准确性的关键因素。为了优化扫描速度,文章提出了一系列实践策略,如调整解码算法、图像预处理技术,以及线程和并发优化。此外,本文还探讨了提升扫描准
【架构设计的挑战与机遇】:保险基础数据模型架构设计的思考

# 摘要
保险业务的高效运行离不开科学合理的架构设计,而基础数据模型作为架构的核心,对保险业务的数据化和管理至关重要。本文首先阐述了架构设计在保险业务中的重要性,随后介绍了保险基础数据模型的理论基础,包括定义、分类及其在保险领域的应用。在数据模型设计实践中,本文详细讨论了设计步骤、面向对象技术及数据库选择与部署
【AVR编程效率提升宝典】:遵循avrdude 6.3手册,实现开发流程优化
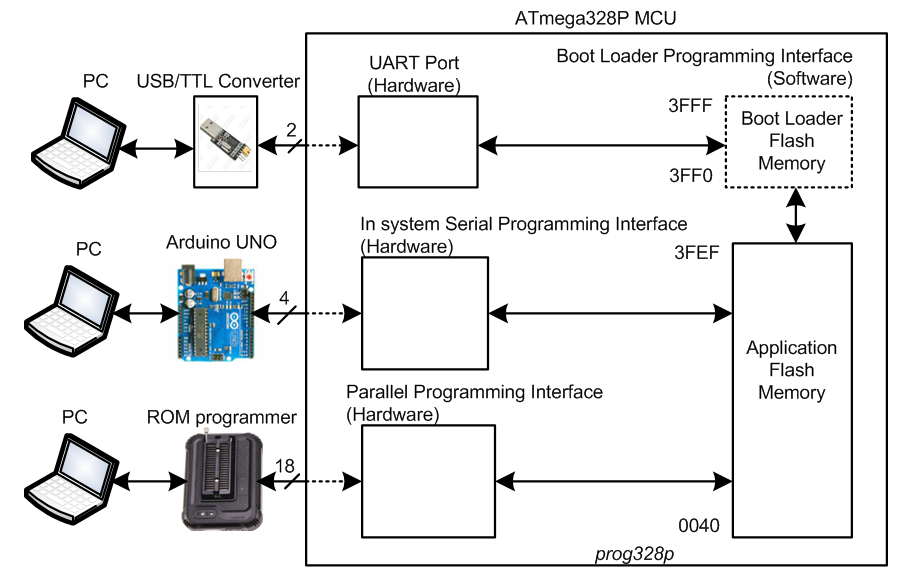
# 摘要
本文深入探讨了AVR编程和开发流程,重点分析了avrdude工具的使用与手册解读,从而为开发者提供了一个全面的指南。文章首先概述了avrdude工具的功能和架构,并进一步详细介绍了其安装、配置和在AVR开发中的应用。在开发流程优化方面,本文探讨了如何使用avrdude简化编译、烧录、验证和调
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )