SVPWM软件实现进阶:代码优化与调试实战经验
发布时间: 2024-12-21 10:48:53 阅读量: 6 订阅数: 7 

svpwm实现,有程序源代码和原理详解
# 摘要
本文深入探讨了空间矢量脉宽调制(SVPWM)软件实现的基本原理、关键算法理论、代码实现与调试基础、性能优化实践以及测试与验证方法。首先,概述了SVPWM的实现框架和数学基础,接着分析了算法的优化方法,并详细介绍了编程环境的搭建、代码编写和调试步骤。进一步,本文探讨了在代码级和系统级上的性能优化策略,以及软件测试的设计、执行和问题定位。最后,探讨了在实时操作系统(RTOS)环境下的SVPWM实现和与其他控制算法的集成。本文旨在为SVPWM软件实现提供全面的指导和实践案例,帮助工程师在实际应用中提升性能并解决相关问题。
# 关键字
SVPWM;算法优化;编程环境;性能测试;代码调试;RTOS集成
参考资源链接:[SVPWM技术解析:优化电机控制与谐波减少](https://wenku.csdn.net/doc/6401ad08cce7214c316ee0af?spm=1055.2635.3001.10343)
# 1. SVPWM软件实现的基本原理与框架
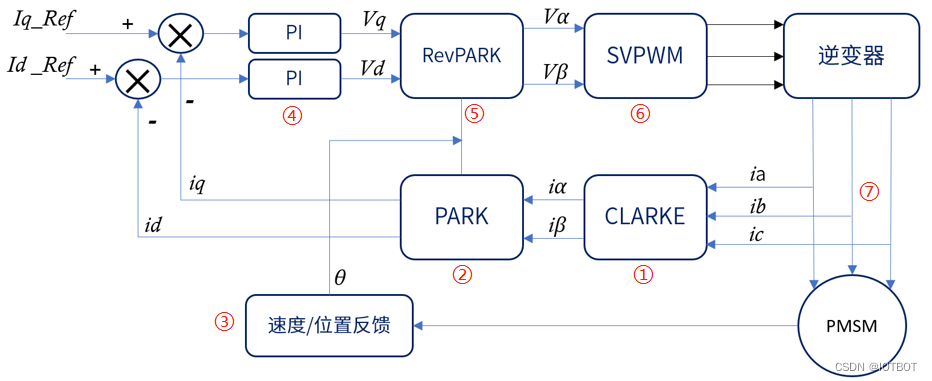
SVPWM(Space Vector Pulse Width Modulation,空间矢量脉宽调制)是一种在电机控制领域中广泛使用的算法,特别是在逆变器的控制中。其核心思想是通过控制逆变器输出的开关管的动作,来合成期望的空间电压矢量。本章将介绍SVPWM的基本原理,并概述实现SVPWM软件的整体框架,为后续章节的算法分析、代码实现及优化提供基础。
## 1.1 SVPWM算法的基本概念
SVPWM将逆变器的开关状态对应于一个旋转平面上的矢量,通过合理安排开关动作的时间比例,使得合成的矢量接近圆形轨迹,进而输出近似正弦波的电压或电流波形。这种方法相比传统的正弦脉宽调制(SPWM),能更有效地利用逆变器的直流电压,从而提高电机驱动的效率和性能。
## 1.2 SVPWM软件实现的框架
SVPWM软件实现通常包含以下几个关键部分:
- 矢量计算:计算出三相桥臂上每个开关管的动作时间,也就是空间电压矢量的三个分量。
- 开关序列生成:根据矢量计算结果,确定每个开关的开关序列和时间点。
- 时间管理:实时调整开关动作的时间,以适应不同的控制需求和电机参数变化。
软件实现框架还包括接口定义、数据结构设计、程序流程控制等部分。接下来的章节将详细介绍这些关键元素如何在代码中实现。
# 2. SVPWM关键算法的理论分析
## 2.1 SVPWM算法的数学基础
在深入探讨SVPWM(Space Vector Pulse Width Modulation)算法的优化方法之前,我们首先需要理解其数学基础,这是算法优化的起点。SVPWM算法在电机控制领域应用广泛,特别是在提高电机的运行效率和动态响应方面发挥着重要作用。它是一种有效的PWM调制技术,可以减少电机的谐波损耗,提高系统的整体性能。
### 2.1.1 空间矢量的定义和计算方法
空间矢量的概念源于电机学的基本理论,通过在二维空间中构建电压或电流的矢量模型,可以更加直观地描述三相交流电的合成效果。每个空间矢量代表了一个特定的电压或电流状态,且具有明确的幅值和相位。
在SVPWM算法中,空间矢量由三相交流电的相电压或相电流计算得出。具体计算方法如下:
假设三相交流电的相电压为 \( U_a, U_b, U_c \),则可以构造两个正交的电压矢量 \( V_\alpha \) 和 \( V_\beta \) 代表其在αβ坐标系中的位置:
\[ V_\alpha = \frac{2}{3}(U_a - \frac{1}{2}U_b - \frac{1}{2}U_c) \]
\[ V_\beta = \frac{\sqrt{3}}{3}(U_b - U_c) \]
进一步,可以将这两个电压矢量组合成一个复数表示的空间矢量 \( V_{\text{space}} \):
\[ V_{\text{space}} = V_\alpha + jV_\beta \]
这个复数形式的空间矢量不仅包含了电压的幅值信息,还包含了相位信息,是SVPWM算法中非常重要的数学概念。
### 2.1.2 调制策略的基本原理
调制策略是SVPWM算法的核心部分,它负责将目标电压矢量映射到合适的开关状态上,以产生期望的电压波形。调制策略的基本原理是利用六个基本电压矢量(V0至V6)来合成目标矢量,这些基本电压矢量对应于三相逆变器的八种开关状态(包括零矢量)。
目标矢量 \( V_{\text{ref}} \) 可以通过线性组合相邻的两个非零矢量以及适当的零矢量来合成:
\[ V_{\text{ref}} = T_aV_a + T_bV_b + T_0V_0 \]
其中,\( T_a \) 和 \( T_b \) 是相邻两个非零矢量的作用时间,\( T_0 \) 是零矢量的作用时间。通过调整这些矢量的作用时间,可以控制 \( V_{\text{ref}} \) 的幅值和相位,实现对电机的有效控制。
## 2.2 SVPWM算法的优化方法
SVPWM算法的性能直接关系到整个电力电子系统的效率和响应速度,因此算法的优化具有重要意义。优化方法主要集中在算法复杂度的降低和数据结构的设计上。
### 2.2.1 算法复杂度的分析和优化
SVPWM算法的优化首先从减少算法的时间复杂度开始。在传统的SVPWM算法中,需要进行大量的计算以确定每个开关周期内的开关状态,这在实时应用中可能会成为瓶颈。
针对这一问题,可以采用预计算和查找表的方法来减少在线计算量。例如,可以预先计算出在不同目标矢量下的开关状态和作用时间,然后将这些数据存储在查找表中。在实际应用中,直接从查找表中读取相应的开关状态和作用时间,可以显著提高算法的执行速度。
### 2.2.2 高效算法的数据结构设计
数据结构的选择对于算法的优化也至关重要。高效的算法需要合理的数据结构以支持快速的查找和更新操作。在SVPWM算法中,可考虑使用数组或哈希表来存储预计算的开关状态和作用时间。
例如,可以使用一个二维数组,其中行表示不同的目标矢量,列表示不同的幅值和相位。每个元素包含了对应的开关状态和作用时间。这样,算法可以通过简单的二维索引来快速定位到所需的信息。
数据结构的设计还应考虑存储的效率和访问的便捷性。为了进一步优化性能,可以将查找表进一步优化为分层结构,将频繁访问的值存储在快速访问的内存中,以减少查找延迟。
下一章节我们将深入探讨SVPWM代码实现与调试基础,其中包含软件编程环境的搭建以及代码实现的步骤,为实现优化方法打下实践基础。
# 3. SVPWM代码实现与调试基础
## 3.1 SVPWM软件编程环境搭建
### 3.1.1 开发工具和库的选择
在搭建SVPWM的软件开发环境时,选择合适的开发工具和库是至关重要的一步。首先,考虑到SVPWM算法对实时性和精确度的要求较高,推荐使用如Visual Studio、Eclipse等支持C/C++语言的集成开发环境(IDE)。这些IDE提供了代码编辑、调试和管理的强大功能,有助于提升开发效率。
在库的选择方面,可以使用专门针对电机控制的数学库,例如MotorControlLib,该库提供了丰富的数学运算和信号处理功能,能够简化SVPWM算法中复杂的数学计算。此外,针对特定硬件平台,例如DSP或FPGA,还可以使用相应的硬件抽象层(HAL)库来访问硬件资源。
在操作系统层面,若在PC上进行初步开发和测试,可以选择Windows或Linux系统,这些系统下有着丰富的开发工具和库支持。在最终部署时,则需要依据目标硬件平台选择相应的实时操作系统(RTOS)。
### 3.1.2 开发环境的配置和测试
配置开发环境主要包括安装所需软件、库和驱动程序,以及创建项目并配置相关编译器和链接器参数。在配置过程中,需要确保开发工具链与目标硬件平台兼容,例如,若使用TI的Code Composer Studio,需要下载并安装对应版本的compiler和相关库。
在创建项目之后,应进行环境测试。首先是编写一个简单的测试程序,如LED闪烁程序,并将其编译、下载到目标硬件上运行。这个过程可以帮助开发者确认IDE的编译环境、下载工具链及硬件连接是否配置正确。
## 3.2 SVPWM代码实现的步骤
### 3.2.1 主要功能模块的设计和编码
SVPWM算法实现的关键在于空间矢量的生成、扇区判断和时间计算。设计时,可以将SVPWM算法的实现划分为几个主要功能模块:
- **主程序模块**:负责整个程序的初始化,包括硬件初始化和定时器配置,以及控制流程的循环。
- **空间矢量生成模块**:根据参考电压矢量计算出三个相邻矢量的作用时间。
- **扇区判断模块**:判断参考电压矢量当前所在的扇区。
- **时间计算模块**:根据所在扇区和参考矢量位置计算开关作用时间。
- **PWM输出模块**:根据计算出的作用时间设置PWM寄存器值,生成SVPWM波形。
在编码时,可以采用面向对象的方式,定

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了 SVPWM(空间矢量脉宽调制)的原理、应用和控制算法。它涵盖了从基本概念到高级优化策略的各个方面。专栏旨在为电机驱动工程师、电力电子专家和电气工程师提供全面的指南,帮助他们了解、设计和实施高效、可靠的 SVPWM 系统。通过提供代码示例、仿真教程和故障排除技巧,该专栏为从业者提供了宝贵的实用知识,使他们能够优化电机性能、提高能源效率并解决工业应用中的挑战。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【诛仙坐标计算大师】:算法优化与性能提升的秘技揭秘
# 摘要
本文全面介绍了诛仙坐标计算大师的概况、应用场景、基础算法以及性能优化策略,并详细探讨了其在游戏开发中的高级应用。通过分析坐标系统的类型转换
【BOSCH LSU4.9与发动机管理:最佳配合秘籍】:确保系统协同运作

# 摘要
本文全面介绍了BOSCH LSU4.9氧传感器及其在发动机管理系统中的应用,阐述了发动机管理系统的基本功能和组成部分,并详细分析了LSU4.9传感器的工作原理和技术特点。通过探讨发动机与LSU4.9传感器的协同机制,本文进一步探讨了系统协同优化的实践,包括发动机参数调整、传感器校准技巧和系统集成调试过程。文章还涵盖了高级诊断与故障排除技术,为实现有效的性
【药物设计革新】:QSPR技术在医药领域的高级应用

# 摘要
本文系统概述了定量结构-活性关系(QSPR)技术在药物设计领域的革新性应用。QSPR技术通过数学模型和描述符分析化学结构与生物活性之间的联系,实现高效准确的药物活性和毒性预测。文章详细介绍了QSPR模型的理论基础、构建流程以及实践应用,同时探讨了QSPR与人工智能、个性化医疗的结合,并对其在跨学科研究中的潜力进行了展望。在此基础上,本文
【网络工程师必备】:Mellanox交换机故障诊断与排错终极指南

# 摘要
Mellanox交换机在现代网络架构中扮演着关键角色,其稳定运行对数据中心和企业网络至关重要。本文全面探讨了Mellanox交换机的故障诊断方法,从理论基础到高级技术,涵盖了硬件架构、排错工具、网络故障分析理论,以及连接性、性能和配置安全问题的排查实践。通过分析具体故障案例和实战演练,本文旨在提供一套系统的故障诊断策略和技巧,帮助工程师快速定位和解决问题,同时强调了持续监控和预防性维护的重要性,以确保网络的高效和可靠性
三旺NP312串口服务器:揭开其强大功能与独特优势的神秘面纱
# 摘要
本文全面介绍了三旺通信公司的NP312串口服务器,旨在阐述其核心功能、应用案例以及在市场竞争中的地位和未来发展趋势。NP312作为一款具备高稳定性和易用性的串口通信设备,支持多种串口通信标准,并提供高效的网络功能和安全特性。该设备在工业自动化、智能楼宇管理等众多领域得到广泛应用,推动了数据采集、远程监控和系统集成的发展。通过对技术优势和行业应用的分析,本文不仅展示了NP312在市场中的独特地位,也探讨了其面临的新技术挑战和创新机遇,特别是在智能制造和物联网(IoT)领域的发展前景。
# 关键字
串口服务器;NP312;串口通信;网络功能;工业自动化;物联网
参考资源链接:[三旺N
一步搞定74LS160:计数器内部结构与工作原理的终极指南
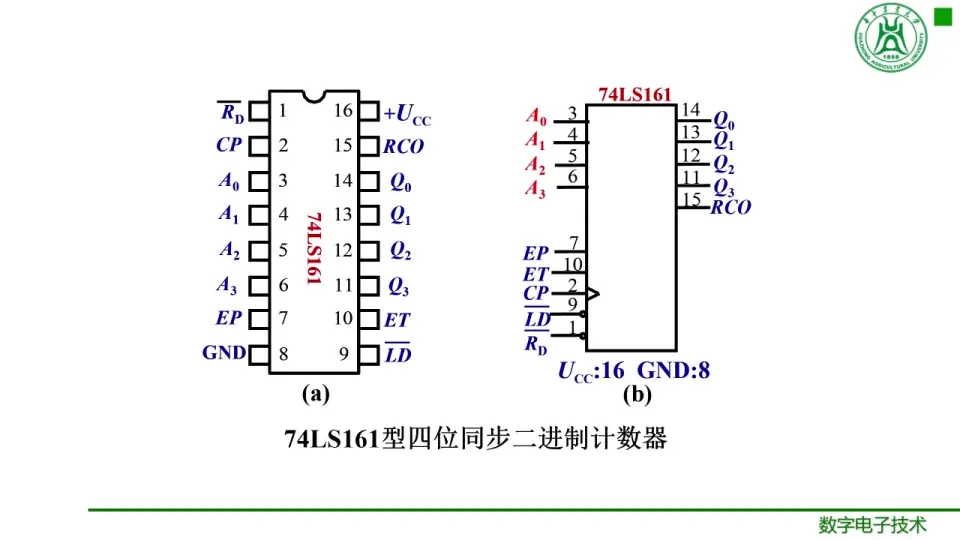
# 摘要
数字计数器是电子工程中的基础构件,而74LS160作为一款广泛使用的计数器,其内部结构和工作原理对于设计者而言至关重要。本文首先介绍了数字计数器的基础知识,随后详细探讨了74LS160计数器的内部结构、逻辑功能以及控制逻辑。通过分析同步与异步计数、计数器的进位与借位机制,以及模式控制和实际应用,本文揭示了74LS160计数器如
傅立叶变换深度解析:揭秘幅度谱偶函数性质及应用(权威教程)

# 摘要
傅立叶变换是一种将函数分解为不同频率成分的基本数学工具,在信号处理、图像分析、物理科学等多个领域有着广泛的应用。本文旨在探讨傅立叶变换的基本概念、数学原理及其在幅度谱偶函数性质方面的理论推导和数值模拟。文章首先介绍了傅立叶变换和幅度谱的基本概念及其数学特性,然后深入分析了
【MIPI CSI-2电源管理】:系统续航优化的关键技术速成课

# 摘要
本文全面介绍了MIPI CSI-2协议及其在电源管理方面的重要作用,探讨了电源管理的理论基础,包括其定义、目标、理论模型和效率衡量标准。结合MIPI CSI-2协议特点,提出了适用于移动设备、物联网设备以及高性能计算平台的电源管理实践技巧和优化策略。文章还分析了电源管理技术在实际应用中的调试与优化方法,并展望了AI和新型电源技术对电源管理未来趋势的影响,同时讨论了当前面临的
【昆仑通态_1062K_KS温度与散热】:专家级技巧,硬件最佳工作状态维持法
# 摘要
本文探讨了硬件温度与散热管理的理论和实践问题,从硬件概述、温度监控与控制到维持硬件最佳工作状态等多方面进行了系统研究。首先,分析了温度与散热的理论基础,然后详细介绍了昆仑通态_1062K_KS硬件的特征,并探讨了温度监控方法和散热系统优化策略。文章进一步讨论了超频与稳定性分析,以及降
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )