YOLO算法优化宝典:提升目标检测精度与速度的秘诀
发布时间: 2024-08-14 13:11:51 阅读量: 27 订阅数: 23 

YOLO算法:实时目标检测的革命性突破与广泛应用
# 1. YOLO算法概述**
YOLO(You Only Look Once)算法是一种单阶段目标检测算法,它以其快速、高效的特性而闻名。与传统的多阶段目标检测算法不同,YOLO算法只执行一次神经网络前向传播,即可同时预测目标的边界框和类别。
YOLO算法的架构主要包括一个主干网络(Backbone)和一个检测头(Detection Head)。主干网络负责提取图像特征,而检测头则负责预测边界框和类别。YOLO算法的优势在于其速度快,可以实时处理图像,这使其非常适合于视频目标检测和自动驾驶等应用场景。
# 2. YOLO算法优化理论
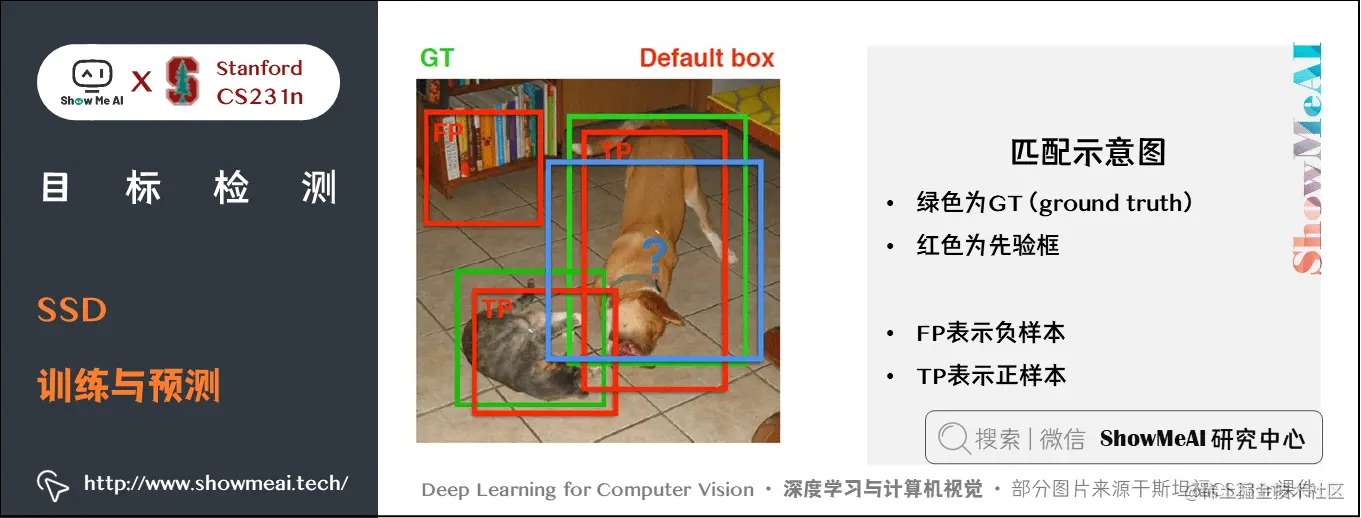
### 2.1 目标检测算法的基本原理
目标检测算法旨在识别图像或视频中的目标并确定其边界框。其基本原理包括:
- **特征提取:**使用卷积神经网络(CNN)从输入图像中提取特征。
- **区域建议:**生成可能包含目标的候选区域。
- **分类和定位:**对候选区域进行分类并预测其边界框。
### 2.2 YOLO算法的架构与实现
YOLO(You Only Look Once)算法是一种单次检测算法,它将目标检测问题转化为回归问题。其架构主要包括:
- **主干网络:**提取图像特征,通常使用预训练的CNN(如Darknet、ResNet)。
- **检测头:**负责预测边界框和目标类别。
- **损失函数:**衡量预测与真实值之间的差异,并指导训练过程。
### 2.3 影响YOLO算法精度的关键因素
影响YOLO算法精度的关键因素包括:
- **主干网络的选择:**主干网络的性能直接影响特征提取能力。
- **检测头的设计:**检测头负责预测边界框和类别,其设计决定了算法的精度和速度。
- **损失函数:**损失函数定义了算法优化目标,不同的损失函数会影响算法的收敛性和精度。
- **训练数据:**训练数据的质量和数量对算法的精度至关重要。
- **超参数:**学习率、批次大小等超参数会影响算法的训练过程和最终精度。
**代码块:**
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class YOLOv3(nn.Module):
def __init__(self, num_classes):
super().__init__()
self.backbone = Darknet53()
self.detection_head = YOLOv3DetectionHead(num_classes)
def forward(self, x):
features = self.backbone(x)
predictions = self.detection_head(features)
return predictions
```
**代码逻辑分析:**
该代码定义了YOLOv3模型,它包含一个主干网络(Darknet53)和一个检测头(YOLOv3DetectionHead)。前向传递函数(forward)将输入图像传递给主干网络,提取特征,然后将特征传递给检测头进行边界框和类别预测。
**参数说明:**
- `num_classes`:目标类别数。
# 3. YOLO算法优化实践
### 3.1 数据预处理优化
数据预处理是目标检测算法中至关重要的一步,它可以有效提升模型的精度和泛化能力。在YOLO算法中,数据预处理主要包括图像增强技术和数据扩充方法。
#### 3.1.1 图像增强技术
图像增强技术可以对原始图像进行一系列操作,使其更适合模型训练。常用的图像增强技术包括:
- **随机裁剪和缩放:**随机裁剪和缩放图像可以增加模型对不同尺寸和位置的鲁棒性。
- **颜色抖动:**随机改变图像的亮度、对比度、饱和度和色相,可以增强模型对光照和颜色变化的适应性。
- **翻转和旋转:**水平或垂直翻转图像,或将其旋转一定角度,可以增加训练数据的多样性。
**代码块:**
```python
import cv2
import numpy as np
def random_crop(image, size):
"""随机裁剪图像。
Args:
image (ndarray): 输入图像。
si
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 YOLO 深度学习算法专栏,您的目标检测实战指南。本专栏将深入探讨 YOLO 算法的原理、优势和局限性,并提供优化技巧以提升精度和速度。您将了解 YOLOv5 的幕后技术,并探索 YOLO 算法在实际场景中的精彩应用。此外,我们将对比 YOLO 算法与竞品,分析其优劣势。专栏还将介绍 YOLO 算法在自动驾驶、医疗影像、安防监控、零售业、工业检测、农业、环境监测和边缘计算等领域的突破性应用。通过全面的训练和部署指南、性能评估秘籍、开源框架和工具,以及常见问题的解决方案,本专栏将帮助您充分利用 YOLO 算法,并了解其最新的进展和研究方向。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【RTC定时唤醒实战】:STM32L151时钟恢复技术,数据保持无忧
# 摘要
本文深入探讨了RTC(Real-Time Clock)定时唤醒技术,首先概述了该技术的基本概念与重要性。随后,详细介绍了STM32L151微控制器的硬件基础及RTC模块的设计,包括核心架构、电源管理、低功耗特性、电路连接以及数据保持机制。接着,文章转向软件实现层面,讲解了RTC
【DDTW算法入门与实践】:快速掌握动态时间规整的7大技巧
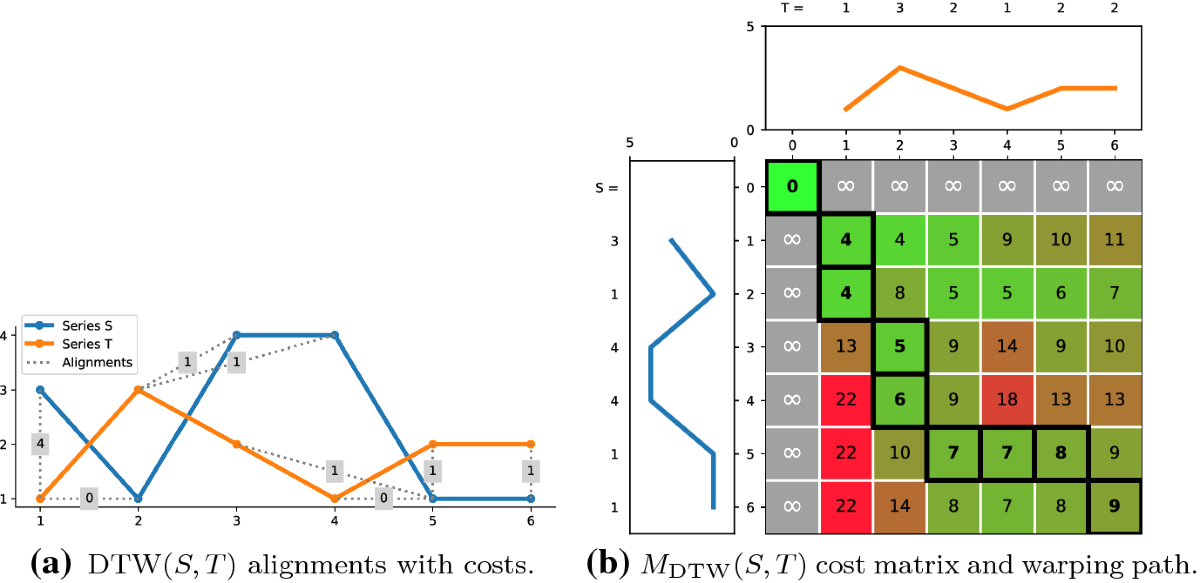
# 摘要
本文系统地介绍了动态时间规整(DTW)算法的基础知识、理论框架、实践技巧、优化策略和跨领域应用案例。首先,本文阐述了DTW算法的定义、背景以及其在时间序列分析中的作用。随后,详细探讨了DTW的数学原理,包括距离度量、累积距离计算与优化和约束条件的作用。接着,本文介绍了DTW算法在语音
跨平台打包实战手册:Qt5.9.1应用安装包创建全攻略(专家教程)
# 摘要
本文旨在详细探讨Qt5.9.1跨平台打包的全过程,涵盖了基础知识、环境配置、实战操作以及高级技巧。首先介绍了跨平台打包的基本概念及其重要性,随后深入到Qt5.9.1的环境搭建,包括开发环境的配置和项目的创建。在实战章节中,本文详细指导了在不同操作系统平台下的应用打包步骤和后续的测试与发布流程。更进一步,本文探讨了依赖管理、打包优化策略以及解决打包问题的方法和避免常见误区。最后,通过两个具体案例展示了简单和复杂项目的跨平台应用打包过程。本文为开发者提供了一个全面的指导手册,以应对在使用Qt5.9.1进行跨平台应用打包时可能遇到的挑战。
# 关键字
跨平台打包;Qt5.9.1;环境搭建
【Matlab_LMI工具箱实战手册】:优化问题的解决之道

# 摘要
Matlab LMI工具箱是控制理论和系统工程领域中用于处理线性矩阵不等式问题的一套强大的软件工具。本文首先介绍LMI工具箱的基本概念和理论基础,然后深入探讨其在系统稳定性分析、控制器设计、参数估计与优化等控制
无线局域网安全升级指南:ECC算法参数调优实战

# 摘要
随着无线局域网(WLAN)的普及,网络安全成为了研究的热点。本文综述了无线局域网的安全现状与挑战,着重分析了椭圆曲线密码学(ECC)算法的基础知识及其在WLAN安全中的应用。文中探讨了ECC算法相比其他公钥算法的优势,以及其在身份验证和WPA3协议中的关键作用,同时对ECC算法当前面临的威胁和参数选择对安全性能的影响进行了深入分析。此外,文章还介绍了ECC参数调优的实战技巧,包括选择标准和优化工具,并提供案例分析。最后,
【H0FL-11000系列深度剖析】:揭秘新设备的核心功能与竞争优势

# 摘要
本文详细介绍了H0FL-11000系列设备的多方面特点,包括其核心功能、竞争优势、创新技术的应用,以及在工业自动化、智慧城市和医疗健康等领域的实际应用场景。文章首先对设备的硬件架构、软件功能和安全可靠性设计进行了深入解析。接着,分析了该系列设备在市场中的定位,性能测试结果,并展望了后续开发路线图。随后,文中探讨了现代计算技术、数据处理与自动化智能化集成的实际应用案例。最
PX4-L1算法的先进应用:多旋翼与固定翼无人机控制革新
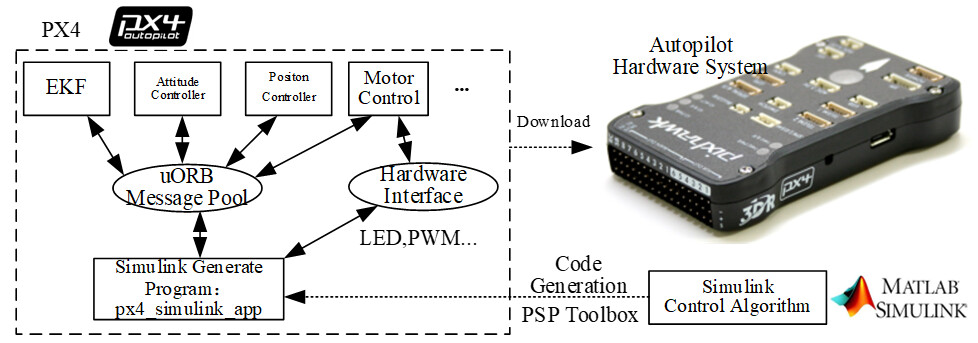
# 摘要
PX4-L1算法是一种先进的控制算法,被广泛应用于无人机控制系统中,以实现高精度的飞行控制。本文首先概述了PX4-L1算法的基本原理和理论基础,阐述了其在无人机控制中的应用,并对L1算法的收敛性和稳定性进行了深入分析。随后,本文探讨了L1算法在多旋翼无人机和固定翼无人机控制中的实施及对比传统算法的性能优势。进一步,文章着重
【利用FFmpeg打造全能型媒体播放器】:MP3播放器的多功能扩展的终极解决方案
# 摘要
本文介绍了利用FFmpeg媒体处理库构建基本MP3播放器的过程,涵盖了安装配置、用户交互设计、多功能扩展以及高级应用。内容包括在不同操作系统中安装FFmpeg、实现MP3文件播放、增强播放器功能如音频格式转换、处理视频和字幕、实时流媒体处理、音频分析以及自定义滤镜和特效。最后,本文讨论了播放器的性能优化与维护,包括调试、性能测试、跨平台兼容性以及插件架构的设计与实现。通过本指南,开发者可以创建功能强大、兼容性良好且性能优化的多用途媒体播放器。
# 关键字
FFmpeg;MP3播放器;多媒体处理;性能优化;跨平台兼容性;自定义滤镜
参考资源链接:[嵌入式Linux MP3播放器设计
【生产线自动化革命】:安川伺服驱动器在自动化生产线中的创新应用案例

# 摘要
生产线自动化是现代工业发展的重要趋势,伺服驱动器作为自动化系统的关键组成部分,对于实现高精度、高效能的生产过程至关重要。本文首先概述了生产线自动化和伺服驱动器的基本知识,继而详细探讨了安川伺服驱动器的工作原理和技术特点,重点分析了其在自动化中的优势。通过具体实践应用案
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )