【摄像头开发实战】:揭秘硬件接口背后的秘密与最佳实践
发布时间: 2025-01-03 07:21:06 阅读量: 9 订阅数: 13 

摄像头OV5116 模块软硬件开发资料.zip

# 摘要
本文全面介绍了摄像头硬件、数据采集与传输、驱动开发、图像处理技术以及系统优化的各个方面。首先,阐述了摄像头硬件的基础知识和数据采集的理论基础,包括传感器技术和模数转换。然后,详述了摄像头数据传输的协议与接口,传输过程中信号完整性的重要性。在摄像头驱动开发方面,讨论了驱动开发的理论框架和实现过程,以及实践技巧。接着,探讨了图像处理的基础理论、算法应用和实时处理实践。最后,分析了摄像头的集成方法、系统级性能优化以及实战案例。通过本文,读者可获得关于摄像头开发的深刻理解,以及在当前和未来技术趋势中的应用。
# 关键字
摄像头硬件;数据采集;信号完整性;驱动开发;图像处理;系统优化
参考资源链接:[思特威SmartClarity新技术:SC230AI/SC430AI/SC530AI图像传感器助力智能安防](https://wenku.csdn.net/doc/4t8ap5wij1?spm=1055.2635.3001.10343)
# 1. 摄像头硬件基础知识
## 1.1 摄像头的组成结构
摄像头硬件由多个关键组件构成,主要包括镜头、传感器(如CCD或CMOS)、模数转换器(ADC)以及信号处理器等。镜头负责捕捉外界光线并聚焦成像,传感器则将光线转换为电信号,随后ADC负责将模拟信号转换成数字信号以便于处理。信号处理器则执行进一步的数据处理,确保最终输出高质量的图像。
## 1.2 摄像头类型与应用场景
摄像头按照使用场景不同,可分为工业级摄像头、消费级摄像头和专业级摄像头。工业级摄像头通常具备高分辨率、高帧率和优异的稳定性能,适用于机器视觉和自动检测系统;消费级摄像头注重成本效益,适用于个人电脑和移动设备;专业级摄像头则追求极致图像质量,常用于影视制作和高端监控领域。
## 1.3 摄像头性能参数解析
摄像头性能参数是评估其质量的重要指标,包括分辨率、帧率、信噪比(SNR)和动态范围等。分辨率决定了图像的细节程度,帧率反映了视频流畅度。信噪比是指有用信号与背景噪音的比值,动态范围则衡量了摄像头能够记录的场景亮度变化范围。了解这些参数有助于为特定应用选择合适规格的摄像头。
# 2. 摄像头数据采集与传输
### 2.1 数据采集的理论基础
#### 2.1.1 传感器技术与原理
摄像头的关键组件之一是传感器,它负责将光信号转换为电信号。常见的传感器类型包括CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)。CCD传感器具有较好的灵敏度和低噪声特性,但通常成本更高,功耗较大。而CMOS传感器则以其低功耗和低成本的优点,在消费级市场中广受欢迎。
**传感器的工作原理:**
1. 光线首先被摄像头镜头聚焦到传感器平面上。
2. 感光元件(像素)吸收光子并产生电荷。
3. 这些电荷在传感器内部被转换为电信号。
4. 电信号随后通过模拟电路处理,包括增益、偏置调整和噪声过滤。
5. 最后,信号被转换成数字形式进行后续处理。
### 2.2 数据传输的协议与接口
#### 2.2.1 USB接口标准与速率
USB(通用串行总线)是一种广泛应用于各种设备的数据传输接口,因其便于连接和热插拔特性而成为摄像头数据传输的常见选择。USB接口拥有多个版本,如USB 1.1、USB 2.0、USB 3.0及更高版本,每个新版本均提供了更高的数据传输速率和改进的电源管理。
**USB接口的速率及版本:**
- USB 1.1:最大传输速率12Mbps。
- USB 2.0:最大传输速率480Mbps,也称为Hi-Speed USB。
- USB 3.0:最大传输速率5Gbps,也称为SuperSpeed USB。
- USB 3.1:最大传输速率10Gbps。
- USB 3.2:最大传输速率20Gbps。
### 2.3 传输过程中的信号完整性
#### 2.3.1 差分信号与同轴电缆
在高带宽数据传输中,差分信号的应用尤为重要,因为它能有效降低由于电磁干扰(EMI)引起的信号失真。差分信号通过两条导线传输两路相位相反的信号,接收端利用这两个信号的差异来重建原始信号。这大大提高了数据传输的稳定性和可靠性。
**同轴电缆在摄像头传输中的应用:**
- 同轴电缆通常用于高质量图像传输,它由中心导体、绝缘介质、编织屏蔽层和外护套构成。
- 由于其屏蔽层的设计,同轴电缆能有效减少电磁干扰,保证信号的完整性。
### 2.2.2 Camera Link与MIPI CSI标准
Camera Link是一种专门针对机器视觉摄像头的数据传输协议,它支持高达680MB/s的数据传输速率,而MIPI CSI(Mobile Industry Processor Interface Camera Serial Interface)是一种用于移动设备摄像头的接口标准。
**Camera Link与MIPI CSI标准对比:**
- Camera Link标准主要用于固定安装的、高质量图像采集系统。
- MIPI CSI则针对便携式设备,例如智能手机和平板电脑中的摄像头。
### 2.2.3 协议转换技术的应用
摄像头的数据输出格式多样,因此协议转换技术变得尤为重要。它允许不同标准之间的数据通信,比如将Camera Link信号转换为MIPI CSI信号,或者反之。在多个摄像头系统或混合接口设备中,协议转换技术确保了不同设备间的兼容性。
**协议转换技术的实现:**
- 使用专用的转换芯片或集成电路。
- 软件层面的协议封装和解封装。
- 设备固件支持的协议转换逻辑。
### 2.3 传输过程中的信号完整性
#### 2.3.2 信号干扰与屏蔽技术
信号在传输过程中可能受到来自电源线、其他信号线或外部电磁场的干扰。为保证信号完整性,需要采取屏蔽技术来减少干扰的影响。
**屏蔽技术的原理及方法:**
- 屏蔽通常涉及使用导电材料包裹信号线。
- 屏蔽材料例如铜箔或编织金属网能反射或吸收大部分干扰信号。
- 高质量的屏蔽还可以防止电磁辐射泄露,从而减少设备对其他设备的干扰。
### 2.3.1 差分信号与同轴电缆
差分信号传输是一种有效的信号完整性保障措施,它通过减少共模干扰来提高信号的质量。在高速数据传输中,差分信号能够提高信号的抗干扰能力。
**差分信号工作原理:**
- 在差分信号传输中,一个信号对由两条线组成,这两条线传输相反的信号。
- 当外部干扰作用于这两条线上时,由于干扰是同相位的,两条线上的干扰会被相互抵消。
- 在接收端,通过比较两条线上的电压差异,重建原始的信号。
### 2.3.2 信号干扰与屏蔽技术
信号的干扰在电子系统中无处不在,尤其是在高速数据传输中,干扰可能导致数据包丢失、传输错误甚至设备故障。有效的屏蔽可以保证信号在传输过程中的质量和完整性。
**屏蔽技术的关键要点:**
- 屏蔽不仅可以防止外部干扰进入信号路径,还能减少设备本身发射的电磁干扰。
- 在设计屏蔽方案时,考虑信号频率、屏蔽材料的导电性和屏蔽覆盖的完整性至关重要。
- 屏蔽材料的种类和屏蔽层的连续性直接影响屏蔽效果。常见的屏蔽材料有铝箔、铜箔和金属编织网。
通过这些技术的应用,摄像头数据采集与传输过程中的信号完整性得到了有效保障。这不仅提高了数据传输的可靠性,也为最终的图像质量打下了坚实的基础。
# 3. 摄像头驱动开发基础
## 3.1 驱动开发的理论框架
摄像头驱动的开发是确保摄像头硬件能够被操作系统正确识别和管理的关键步骤。理解驱动开发的理论框架是掌握整个摄像头驱动开发流程的基石。
### 3.1.1 操作系统中的驱动模型
在现代操作系统中,驱动程序是硬件设备与系统内核之间的桥梁。不同操作系统的驱动模型各有特点。例如,在Linux操作系统中,内核模块是驱动程序的基本形式。它们在需要时加载进内核,完成任务后卸载。
驱动程序通常需要处理设备的初始化、I/O操作、中断处理、电源管理等任务。它们必须高效且可靠,因为它们直接控制硬件。
### 3.1.2 硬件抽象层的概念与作用
硬件抽象层(HAL)是操作系统中的一层,它的目的是隔离硬件与上层应用。HAL的引入,使得上层应用不需要关心硬件的具体实现细节。这种抽象带来了许多优点,例如,提高了软件的可移植性,方便了驱动程序的升级和维护,以及增强了操作系统的稳定性。
HAL的设计需要遵循一定的原则,比如应当尽量简单,只提供必要的接口。其复杂性应尽可能向内核侧和硬件侧隐藏,这样上层应用才能更专注于业务逻辑。
## 3.2 摄像头驱动的实现过程
实现摄像头驱动的过程是复杂的,需要对相关硬件和软件接口有深入的理解。
### 3.2.1 V4L2框架的介绍与应用
视频4Linux 2(V4L2)是Linux系统中用于视频输入输出的标准驱动框架。V4L2为摄像头驱动开发提供了一套标准的API,使得驱动开发者可以遵循一套统一的规范来实现驱动的功能。
在实际的驱动实现中,V4L2框架主要通过一系列的数据结构和函数回调来定义视频设备的操作。开发者需要根据硬件规格书来实现这些接口,包括设备的打开、关闭、内存映射、缓冲区管理以及视频流的捕获和输出等。
### 3.2.2 驱动中的缓冲管理与同步机制
摄像头驱动中的缓冲管理主要负责在用户空间和内核空间之间传输视频数据。为了提高效率,缓冲通常是以队列的形式存在。缓冲管理需要处理缓冲的分配、同步和释放等任务。驱动程序必须确保缓冲能够安全地在用户空间和内核空间之间传输,这通常涉及到复杂的同步机制。
在多缓冲的情况下,需要使用到锁和信号量等同步机制来保证数据的一致性和完整性。例如,读写操作不能同时访问同一个缓冲区,否则会引发数据错乱。
### 3.2.3 常见错误的调试方法
摄像头驱动开发过程中,调试是一个不可缺少的步骤。由于驱动运行在内核空间,普通的调试手段如printf日志记录并不适用于此。因此,内核开发者们通常会使用内核提供的printk函数来记录调试信息。
除了日志记录,内核还提供了内核调试器kdb,以及动态调试工具ftrace等。这些工具可以帮助开发者跟踪和分析程序运行过程中的各种状态,包括函数调用的堆栈、变量的值等。在调试过程中,根据错误信息逐步缩小问题范围是定位问题的有效方法。
## 3.3 驱动开发的实践技巧
驱动开发不仅需要理论知识,更需要实践经验。下面提供了一些实践技巧,这些技巧对于提高摄像头驱动开发的效率和质量都至关重要。
### 3.3.1 驱动代码的性能优化
驱动代码的性能直接影响到整个系统的性能。性能优化可以从多个角度进行:减少不必要的内存分配和释放,使用高效的算法和数据结构,避免内核空间与用户空间的频繁切换,使用内核的异步处理机制等。
性能优化通常需要开发者对内核编程的特性和硬件的工作机制有深入的理解。例如,了解延迟绑定技术可以优化驱动的加载过程,减少系统的启动时间。
### 3.3.2 硬件兼容性测试与故障排除
硬件兼容性测试是确保驱动能够在不同的硬件上稳定运行的重要环节。它通常涉及广泛的硬件平台,需要考虑不同的操作系统版本、内核配置、硬件规格等因素。
在测试过程中,开发者可以使用系统日志、内核调试器、硬件监控工具等来捕捉和诊断问题。对于出现的问题,要逐一排查,并分析可能的原因,如硬件故障、驱动编程错误、电源管理问题等。一旦发现故障,就需要及时进行修复并重新测试。
为了更好地帮助大家理解这一章节的内容,这里提供一个简单的表格,比较不同操作系统下驱动开发的一些特点:
| 操作系统 | 驱动模型 | 调试工具 | 性能优化策略 |
| --------- | --------- | --------- | --------- |
| Linux | 内核模块 | printk, kdb, ftrace | 优化内存管理、减少内核空间与用户空间切换 |
| Windows | 驱动程序包 (DDK/SDK) | WinDbg, KdPrint | 优化数据传输,内存使用,异步处理 |
| macOS | IOKit | Console, dtrace, ktrace | 使用高效的I/O系统调用,优化缓冲管理 |
通过本章节的介绍,我们希望能够为读者提供摄像头驱动开发的坚实基础,并在实践中能够熟练运用这些知识和技巧。
# 4. 摄像头图像处理技术
图像处理是摄像头技术中不可或缺的一部分,它涉及到将采集到的图像数据转换成有意义的信息。本章节将深入探讨图像处理的理论基础,分析图像处理中常见的算法,并探索实时图像处理的实践技巧。
## 4.1 图像处理的理论基础
### 4.1.1 数字图像处理原理
数字图像处理是利用计算机对图像进行分析和处理的一门技术。图像可以被表示为数字信号,即像素值的集合,这些像素值定义了图像的颜色和亮度。图像处理的基本任务包括图像恢复、图像编码、图像增强、特征提取、图像分割、图像压缩等。
在进行数字图像处理时,首先需要了解图像的格式和属性。常见的图像格式有位图(BMP)、联合图片专家小组(JPEG)、图形交换格式(GIF)、便携式网络图形(PNG)等。了解这些格式有助于在处理过程中选择最合适的方法和工具。
### 4.1.2 图像预处理技术
图像预处理是为了改善图像质量或使后续处理步骤更容易而进行的一系列操作。预处理步骤可能包括图像去噪、对比度增强、亮度校正等。去噪是为了去除图像中的噪声信号,常用的去噪算法包括均值滤波、中值滤波等。对比度增强通过调整图像的亮度和对比度使得图像的细节更加明显。亮度校正则用于调整图像的整体亮度,使之更符合人眼的视觉效果。
## 4.2 图像处理的算法应用
### 4.2.1 边缘检测与形态学操作
边缘检测是图像处理中用于识别图像中物体边缘的算法。典型的边缘检测算子有Sobel算子、Canny边缘检测器、Prewitt算子等。这些算子通过计算图像中像素点的梯度值来确定边缘位置。
形态学操作是基于图像形状的处理技术,常用于二值图像。形态学操作包括腐蚀、膨胀、开运算和闭运算等。腐蚀可以用来消除小的白点,膨胀则用来填充小的黑点。开运算和闭运算分别用于去除小物体和桥接相邻物体间的间隙。
### 4.2.2 颜色校正与白平衡调整
颜色校正和白平衡调整是图像处理中用于确保图像色彩准确性的技术。颜色校正是对图像进行色彩变换,以修正由于光源、摄像设备或环境等因素导致的颜色偏差。白平衡调整则是基于灰度世界理论或中性色点理论,调整图像中红、绿、蓝三基色的比例,使得原本应该为中性色的物体在图像中呈现出准确的颜色。
## 4.3 实时图像处理实践
### 4.3.1 实时流媒体处理技术
实时流媒体处理技术是指在图像数据采集后,几乎不延迟地进行处理的技术。这要求处理系统具备高速的数据处理能力和足够的计算资源。常见的实时流媒体处理技术包括硬件加速和并行计算。
### 4.3.2 GPU加速与并行计算
GPU(图形处理单元)由于其强大的并行处理能力,成为进行实时图像处理的理想选择。现代GPU支持CUDA(计算统一设备架构)或OpenCL(开放计算语言)等技术,通过并行计算实现图像处理的加速。
为了充分利用GPU的并行处理能力,开发者需要对图像处理算法进行优化,以便在GPU上高效运行。这可能包括将数据结构和算法调整为适合并行处理的形式,减少内存访问延迟和计算开销。
**代码示例:** 下面是一个简单的CUDA代码段,用于演示如何使用CUDA进行图像的并行处理。
```c
__global__ void colorConvertKernel(unsigned char* inputImage, unsigned char* outputImage, int imageWidth, int imageHeight) {
int x = blockIdx.x * blockDim.x + threadIdx.x;
int y = blockIdx.y * blockDim.y + threadIdx.y;
if(x < imageWidth && y < imageHeight) {
// 假设图像为RGB格式,获取每个像素的RGB值
unsigned char r = inputImage[(y * imageWidth + x) * 3];
unsigned char g = inputImage[(y * imageWidth + x) * 3 + 1];
unsigned char b = inputImage[(y * imageWidth + x) * 3 + 2];
// 简单的颜色转换算法,例如灰度转换
unsigned char gray = (unsigned char)(0.299 * r + 0.587 * g + 0.114 * b);
// 写入新的图像数据
outputImage[(y * imageWidth + x)] = gray;
}
}
```
**参数说明:** 在此代码中,`inputImage` 是输入图像的指针,`outputImage` 是处理后的图像指针,`imageWidth` 和 `imageHeight` 是图像的宽度和高度。`blockIdx` 和 `threadIdx` 是CUDA编程模型中用于指定线程在网格中的位置的变量。该函数对每个像素执行灰度转换,并将结果存储在输出图像中。
**代码逻辑:** 这个简单的内核函数将图像转换为灰度图,展示了如何在GPU上并行处理每个像素。
本章节的介绍只是对摄像头图像处理技术的初步探索。在实践中,开发者需要结合具体的应用场景,选择合适的算法和技术进行深入开发和优化。图像处理技术的精进不仅仅需要理论知识,更需要实际操作经验和对新技术的不断探索。
# 5. 摄像头集成与系统优化
## 5.1 摄像头的集成方法
### 5.1.1 摄像头与应用软件的集成
在现代的IT和相关行业中,摄像头与应用软件的集成是一个不断演进的过程,不仅涉及到图像捕获,还涉及到视频流的处理、分析以及后续的功能实现。这一集成过程可以分为几个关键步骤:
1. **软件环境准备**:首先,需要确保你的开发环境已准备好摄像头驱动和相关的库文件。对于Linux系统,通常需要确保V4L2(Video for Linux Two)框架已经被加载。在Windows上,则需要安装相应的SDK或者库。
2. **摄像头检测与初始化**:在代码中,需要检测系统可用的摄像头设备,并创建一个摄像头实例。例如,在Linux下使用V4L2时,会涉及到打开设备文件`/dev/videoX`,查询设备能力,设置视频格式等操作。
3. **捕获与控制**:一旦摄像头实例被初始化,软件可以发送请求来捕获视频帧,调整摄像头的各种参数(如曝光、白平衡等)。这些操作通常需要通过VIDIOCQUERYCTRL、VIDIOCGETCTRL以及VIDIOCSETCTRL等控制指令来完成。
4. **视频流处理**:捕获到的视频数据需要实时处理,这可能涉及到编码、解码、帧率调整、分辨率转换等。处理之后的数据才能被应用软件进一步使用,如显示、存储、传输等。
5. **功能拓展与集成测试**:在完成基本的捕获和处理流程后,根据应用场景的需求,可能还需要集成额外的功能,例如人脸识别、运动检测、图像增强等。在集成这些功能时,需要进行详细的测试来确保摄像头和应用软件的稳定性和兼容性。
下面是一个简单的示例代码,展示了如何在Linux下使用V4L2框架打开摄像头并捕获一帧图像:
```c
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
int main(int argc, char **argv)
{
int fd = open("/dev/video0", O_RDWR);
if (fd == -1) {
perror("Opening video device");
return 1;
}
// 查询设备的能力(Capabilities)
struct v4l2_capability cap;
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1) {
perror("Failed to get device capabilities");
close(fd);
return 1;
}
// 设置图像格式(在这里只做简单示例,实际应用中需要根据需求进行详细配置)
struct v4l2_format format;
format.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
format.fmt.pix.width = 640;
format.fmt.pix.height = 480;
format.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG;
format.fmt.pix.field = V4L2_FIELD_NONE;
if (ioctl(fd, VIDIOC_S_FMT, &format) == -1) {
perror("Failed to set image format");
close(fd);
return 1;
}
// 捕获一帧图像
struct v4l2_buffer buffer;
memset(&buffer, 0, sizeof(buffer));
buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buffer.memory = V4L2_MEMORY_MMAP;
if (ioctl(fd, VIDIOC_QUERYBUF, &buffer) == -1) {
perror("Failed to query buffer");
close(fd);
return 1;
}
if (ioctl(fd, VIDIOC_QBUF, &buffer) == -1) {
perror("Failed to queue buffer");
close(fd);
return 1;
}
if (ioctl(fd, VIDIOC_DQBUF, &buffer) == -1) {
perror("Failed to dequeue buffer");
close(fd);
return 1;
}
// 处理捕获的图像数据...
close(fd);
return 0;
}
```
在代码执行的过程中,我们首先打开设备`/dev/video0`,然后查询设备的能力,设置视频流格式,最后捕获一帧图像。值得注意的是,这里只是展示了基本的打开和捕获流程,真正的应用开发还需要包括错误处理、多缓冲管理、实时流处理等复杂的内容。
### 5.1.2 摄像头固件升级与管理
摄像头固件是运行在摄像头硬件内部的软件代码,它控制着摄像头的基本功能和特性。固件的升级和管理是确保摄像头正常工作和性能优化的重要环节。
摄像头固件升级通常需要以下步骤:
1. **下载固件**:首先,需要从摄像头制造商的官方网站或者通过其他正规渠道下载最新的固件文件。
2. **准备升级环境**:根据摄像头固件升级的要求,准备适当的升级环境。某些固件升级可能需要特定的工具,或者在特定的操作系统环境下进行。
3. **关闭摄像头应用**:在升级固件之前,需要确保摄像头没有被任何应用程序打开,以避免升级过程中发生冲突。
4. **执行固件升级**:按照制造商提供的指南执行固件升级。这通常会涉及到使用特定的工具或者命令行指令将固件文件传输到摄像头。
5. **验证升级结果**:升级完成后,重新启动摄像头并检查其功能,确保升级成功并没有任何功能损坏。
固件升级是一个风险较高的操作,因为若升级过程中出现意外,可能导致摄像头无法工作。因此,在进行固件升级之前,务必仔细阅读并理解制造商提供的所有指南和说明。另外,如果摄像头固件升级不是必须的,那么尽量避免频繁升级,以降低潜在风险。
## 5.2 系统级性能优化
### 5.2.1 系统资源与调度优化
在集成摄像头到系统并进行性能优化的过程中,系统资源的分配和调度是非常关键的。特别是在多任务环境中,合理的资源管理可以显著提升摄像头数据流的处理效率,确保低延迟和高吞吐量。
系统资源优化通常涉及到以下几个方面:
- **内存管理**:优化内存的分配和使用,例如使用内存池,可以减少内存碎片并提高分配效率。
- **处理器调度**:合理安排CPU时间片的分配,对于需要快速响应的任务可以设置高优先级,以减少延迟。
- **I/O调度**:优化磁盘I/O操作,使用适当的调度算法(如CFQ、Deadline、NOOP等),可以减少I/O瓶颈。
- **网络带宽管理**:合理分配网络带宽,确保摄像头数据流稳定传输,特别是在带宽有限的环境下,这一点尤为重要。
一个简单的例子是在Linux系统中,可以使用`nice`和`renice`命令来调整进程的优先级,`nice -n -20`命令用于以最高优先级启动一个进程,而`renice -n -20 -p <PID>`命令用于调整已运行进程的优先级。
调度优化的另一个重要方面是使用多线程技术。由于摄像头的数据采集通常是一个并行处理过程,合理的多线程设计可以显著提升系统性能。例如,在使用V4L2框架时,可以使用多线程同时进行图像捕获和图像处理,从而减少数据处理的时间并提升整体性能。
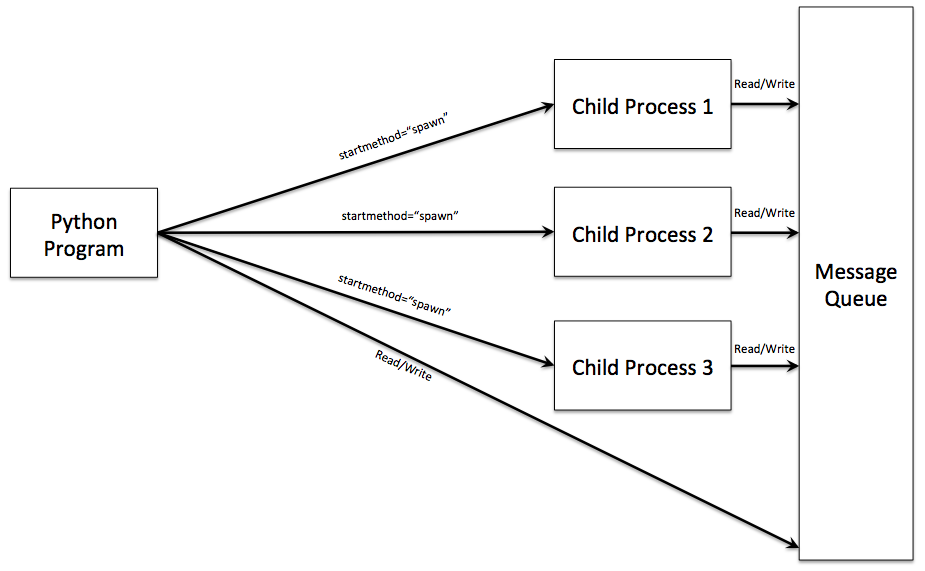
### 5.2.2 摄像头数据流的多线程处理
多线程处理是现代操作系统中常用的一种性能优化方法。通过将任务分解到不同的线程中执行,可以充分利用多核CPU的优势,加快数据处理速度,并提高系统的响应能力。
对于摄像头数据流来说,多线程处理可以分为以下几个步骤:
1. **主线程**:主线程负责摄像头的数据采集工作,如启动视频流捕获、处理设备控制请求等。
2. **工作线程**:设置一个或多个工作线程用于处理数据流。这些线程可以进行图像解码、图像处理、数据压缩等操作。
3. **同步机制**:为了确保数据在多个线程间正确地共享,需要采用适当的同步机制,如互斥锁(mutexes)、信号量(semaphores)和条件变量(condition variables)等。
4. **任务队列**:设置一个任务队列用于在不同线程间传递任务。主线程将捕获到的图像帧放入队列,工作线程从队列中取出图像帧进行处理。
5. **线程通信**:在多线程之间可能需要进行通信,例如通知主线程图像帧已处理完成,或者工作线程需要暂停/继续执行等。
多线程处理的优点是提高了程序的并发性,但同时也增加了编程的复杂度。开发者需要考虑线程同步、线程安全、死锁等问题。在Linux系统中,可以使用`pthreads`库来实现多线程编程。
下面是一个使用C语言和`pthreads`库的多线程处理的简单示例:
```c
#include <pthread.h>
#include <stdio.h>
void* process_images(void* arg) {
// 这里添加图像处理的代码
// 线程函数,处理传入的图像帧
printf("Processing image in thread %ld\n", (long)arg);
return NULL;
}
int main(int argc, char *argv[]) {
pthread_t thread_id[5]; // 创建5个工作线程
// 创建并启动工作线程
for (int i = 0; i < 5; ++i) {
if (pthread_create(&thread_id[i], NULL, process_images, (void*)(long)i) != 0) {
perror("Failed to create thread");
return 1;
}
}
// 等待所有工作线程完成
for (int i = 0; i < 5; ++i) {
pthread_join(thread_id[i], NULL);
}
printf("All threads have finished\n");
return 0;
}
```
在这个例子中,我们创建了5个工作线程,每个线程都执行`process_images`函数,负责处理图像数据。通过使用`pthread_create`函数来创建线程,并通过`pthread_join`函数等待线程完成。
## 5.3 实战案例分析
### 5.3.1 常见应用场景的摄像头配置
摄像头的应用场景非常广泛,从视频会议到安全监控,再到医疗成像等领域,摄像头的配置和优化方法各有不同。以下是一些常见应用场景的摄像头配置方法:
- **视频会议系统**:摄像头需要支持高清视频(至少1080p),同时具备良好的低光表现和自动对焦功能。此外,视频会议系统可能还需要支持多视频流和音频同步。
- **安全监控**:在安全监控领域,摄像头应具备夜视功能,支持全天候运作,同时最好具备运动检测和警报功能。
- **医疗成像**:医疗摄像头需要具备极高的图像质量,支持高分辨率,并有精确的颜色还原功能。同时,这类摄像头可能还需要特殊的消毒处理和抗污染设计。
在配置这些应用场景的摄像头时,需要考虑到摄像头的分辨率、帧率、接口类型、数据传输带宽、功耗等因素,并且与应用场景中其他设备(如显示设备、音频设备、存储设备等)进行合理的集成和优化。
### 5.3.2 性能评估与案例总结
性能评估是摄像头集成过程中的关键步骤,它不仅可以提供对系统当前状态的认识,还可以指导进行进一步的优化。性能评估的指标通常包括:
- **帧率**:摄像头捕获视频流的帧率,用于衡量视频的流畅度。
- **延迟**:从摄像头捕获图像到图像显示或处理完成的时间间隔。
- **CPU/GPU占用率**:处理视频流所占用的计算资源。
- **带宽使用**:传输视频数据所占用的网络带宽。
- **分辨率**:摄像头支持的最高图像分辨率。
- **内存占用**:处理视频流时所占用的内存大小。
在进行性能评估时,可以使用各种性能分析工具。例如,在Linux系统中,可以使用`top`、`htop`、`nmon`等工具来监控系统资源的使用情况。对于摄像头性能,可以使用`ffmpeg`命令行工具来分析视频流的帧率和延迟。
案例总结是对具体应用中摄像头集成和优化工作的回顾,通过分析案例中的成功经验与失败教训,可以帮助我们理解集成的复杂性并改进未来的工作。
例如,一个成功的案例可能包括以下几点:
- **硬件选择**:针对应用需求精心选择合适的摄像头硬件。
- **驱动与软件配置**:正确配置驱动和软件,以确保摄像头硬件的性能得到充分利用。
- **系统级优化**:对操作系统进行适当的优化,例如调整内核参数,使用最新的硬件支持补丁等。
- **测试与调整**:通过反复的测试和调整,确保系统稳定,并在实际应用中达到预期的性能。
而在失败的案例中,可能存在的问题包括:
- **不匹配的硬件选择**:选择的摄像头硬件与应用场景的需求不匹配,导致性能问题。
- **驱动与软件配置错误**:错误的配置导致摄像头性能低下或者功能无法正常使用。
- **忽视系统级优化**:没有考虑到整个系统的资源分配和调度,造成摄像头性能瓶颈。
- **测试不足**:没有进行充分的测试,导致问题在实际应用中暴露。
通过对成功和失败案例的分析,我们可以提炼出摄像头集成的最佳实践,并将这些经验应用到未来的项目中,持续提升摄像头的应用性能和用户体验。
# 6. 摄像头开发工具与资源
## 6.1 开发工具的介绍与选择
### 6.1.1 软件仿真工具的使用
仿真工具是摄像头开发中不可或缺的环节,它允许开发者在不需要实际硬件的情况下测试和验证摄像头功能。一个典型的仿真软件可以帮助开发者进行以下操作:
- 验证摄像头配置的正确性,如分辨率、帧率等。
- 评估摄像头在不同环境条件下的性能。
- 测试摄像头驱动程序在特定的操作系统上的表现。
举个例子,如果我们使用的是基于Linux系统的V4L2框架开发摄像头驱动,我们可以使用GStreamer或FFmpeg等工具进行数据流的模拟。通过这些工具,我们可以模拟输入数据流,并观察输出流是否符合预期。
```bash
# 使用FFmpeg创建一个模拟的视频数据流
ffmpeg -f v4l2 -i /dev/video0 -vcodec mpeg4 -f mpegts udp://239.255.255.250:1234
```
上述代码将创建一个模拟视频流并发送到指定的UDP地址。这是一种在没有实际摄像头硬件的情况下测试流媒体处理软件的常用方法。
### 6.1.2 硬件调试工具的介绍
硬件调试工具对于摄像头硬件故障的诊断和调试至关重要。对于摄像头硬件的调试,一些常见的工具包括:
- 逻辑分析仪:用于捕获和分析数字信号,尤其是高速数据传输如MIPI CSI信号。
- 示波器:用于测量信号电平随时间变化的情况。
- 电源分析仪:用于监控和测量摄像头在不同工作状态下的电源使用情况。
- JTAG和SWD调试器:用于深入调试嵌入式系统,如FPGA或ARM处理器。
例如,逻辑分析仪可以帮助开发者观察到摄像头在启动过程中,各个信号线上的具体时序,从而帮助开发者优化信号的时序设计,确保摄像头在更广泛的条件下稳定工作。
## 6.2 在线资源与社区支持
### 6.2.1 开发文档与标准
在摄像头开发的过程中,参考权威的开发文档和标准是提高开发效率和确保产品质量的重要手段。以下是几个在摄像头开发中常用的资源:
- V4L2官方文档:详细介绍Linux下的视频捕获设备驱动开发框架。
- USB Type-C和USB Power Delivery规范:为USB接口设计和数据传输提供标准支持。
- MIPI联盟提供的Camera Serial Interface(CSI)标准:为移动设备和汽车应用中的摄像头接口提供标准。
开发者可以通过访问这些资源的官方网站来获取最新的规范和文档。
### 6.2.2 开源项目与社区论坛
开源项目和社区论坛为摄像头开发提供了交流的平台。开发者可以从中学到他人的经验,或者直接参与到开源项目中贡献自己的力量。以下是一些有用的资源:
- GitHub上的开源摄像头驱动项目:提供现成的驱动代码参考和学习。
- Stack Overflow和Linux内核邮件列表:可以提问和找到相似问题的解决方案。
- MIPI联盟社区论坛:可以与其他开发者讨论标准实施和最佳实践。
加入这些社区可以让你在遇到问题时快速找到帮助,同时也能让其他开发者受益于你的知识和经验。
## 6.3 摄像头开发的未来趋势
### 6.3.1 人工智能在图像处理中的应用
AI技术的进步为摄像头开发带来了新的可能。现在,越来越多的摄像头系统集成了AI能力,以执行实时图像识别和处理任务。例如:
- 边缘计算:通过在摄像头设备本身运行AI模型,实现实时的数据处理和响应。
- 智能场景识别:摄像头能够自动识别场景中的关键信息并进行相应的优化。
- 动作识别:摄像头可以识别并响应特定的动作或行为。
```python
# 一个简单的动作识别代码示例,使用TensorFlow框架
import tensorflow as tf
model = tf.keras.models.load_model('action_recognition_model.h5')
camera_stream = get_camera_stream()
for frame in camera_stream:
processed_frame = preprocess_image(frame)
prediction = model.predict(processed_frame)
print(prediction)
```
### 6.3.2 新型接口技术的发展展望
随着摄像头技术的不断进步,新的接口技术也在不断涌现。例如,PCIe接口由于其高带宽和低延迟的特点,正逐渐成为摄像头连接服务器和高性能工作站的首选。同时,随着无线技术的发展,例如WiGig和5G技术的应用,未来的摄像头有可能实现无线高速数据传输。
这些新型技术的发展将极大地拓宽摄像头的应用场景,从传统的安全监控到增强现实(AR)、虚拟现实(VR)等新兴领域,都将受益于这些技术的革新。
以上内容展示了摄像头开发工具与资源的概览,并对未来的发展趋势进行了展望。通过阅读本章节,你可以了解到在开发过程中可以利用的各种工具和资源,以及未来技术如何影响摄像头开发的方向。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《摄像头 数据手册》专栏是专为摄像头驱动程序开发人员和调试人员打造的权威指南。它深入探讨了摄像头硬件接口的秘密和最佳实践,提供了从零基础到专家的全面驱动开发指南。通过对数据手册的深入分析,专栏揭示了关键参数和性能优化策略,帮助提升摄像头性能。此外,它还涵盖了驱动程序性能优化、高级功能实现、固件更新安全、问题诊断和解决等进阶技术。专栏还提供了摄像头驱动开发工具箱、安全编码实践和跨平台开发策略等实用资源,帮助开发人员构建高效的摄像头开发环境。通过阅读本专栏,开发人员可以掌握摄像头数据手册的奥秘,开发出高性能、可靠且安全的摄像头驱动程序。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【C#与汇川PLC通讯全攻略】:从入门到精通,打造高效通讯解决方案
# 摘要
本文详细探讨了C#语言与汇川PLC进行通信的全过程,包括基础连接、数据交互以及高级通讯功能的开发。文章首先介绍了C#在网络编程中的基本概念,包括TCP/IP和UDP协议以及Socket编程。随后,解析了汇川PLC通讯协议,并详细阐述了如何在C#中实现与汇川PLC的连接和数据交互,包括数据读取、写入、异常处理与日志记录。此外,文章还涵盖了高级数据处理技巧、多线程和异步通讯的实践应用,以及集成开发环境(IDE)的使用技巧。案例研究与最佳实践部分分析了典型应用,提出了构建高效通讯解决方案的策略,并对技术挑战和未来发展进行了展望。本研究旨在为工业自动化领域中C#与PLC通讯的开发者提供实用的
StarCCM+ FieldFunction函数全面指南:从基础到高级应用的5大秘诀

# 摘要
本文全面介绍了StarCCM+软件中的FieldFunction函数,详细阐述了该函数的基础知识、计算逻辑以及在模拟和高级主题中的应用。首先概述了FieldFunction函数的核心概念、定义及作用域,并提供了创建和编辑的步骤与技巧。其次,文章深入探讨了其计
Python并发编程:掌握多线程和多进程的6个高级技巧
# 摘要
本文深入探讨了Python并发编程的核心概念与实践技巧,涉及多线程、多进程以及异步编程的技术细节和高级应用。首先,文章介绍了多线程的基础知识,包括线程模型和全局解释器锁(GIL),以及多线程编程的实践和高级应用。然后转向多进程编程,讲解了进程间通信和多进程的优势,及其在CPU密集型任务中的应用。接下来,文章讨论了同步工具的理论与实践,包括锁、信号量和条件变量,并展示了如何使用这些工具解决复杂的同步问题。在深入异步编程的章节
【数据分析实战技巧】:从清洗到条件排斥组的数据准备全攻略
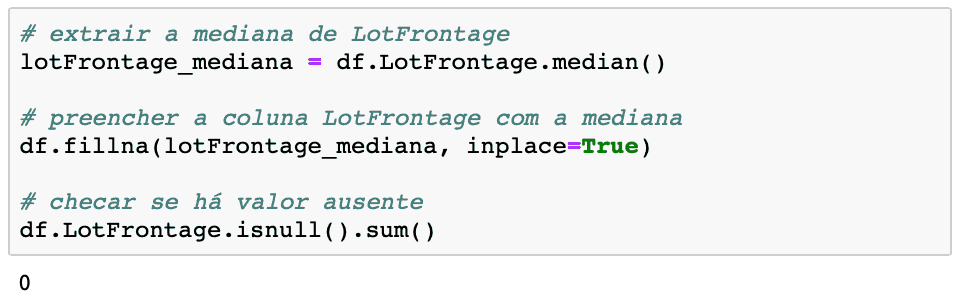
# 摘要
数据分析作为数据科学的核心,涉及数据清洗、探索、处理以及高级应用等多个环节。本文首先介绍了数据分析的基础知识,随后深入探讨了数据清洗的技巧和工具,强调了对缺失数据的处理和实用工具如Excel和Pandas的应用。接着,本文阐述了数据探索的分析方法以及如何通过Matplotlib和Seaborn等工具进行有效的数据可视化。条件排斥与分组处
【高级应用揭秘】:如何在离散相模型中优化射流颗粒设置

# 摘要
离散相模型(Discrete Phase Model, DPM)在射流颗粒研究领域具有重要应用价值。本文首先介绍了离散相模型的基础理论及其在多个应用领域中的应用情况。第二章对射流颗粒设置的优化原理进行了详细分析,包括颗粒动力学方程、射流颗粒与流体的相互作用,以及射流速度和粒径分布、环境温度与压力等参数的影响。第三章探讨了数值模拟技术在优化射流颗粒过程中的应用,涵盖模拟软件的选择、参数设置、模拟步骤和案例分析。
物联网时代液位检测新范式:FDC2214的智能融合

# 摘要
本文深入探讨了物联网技术在液位检测领域的应用,特别聚焦于FDC2214芯片的原理和技术特点。章节涵盖FDC2214的电容式传感技术背景、工作原理、性能优势,以及基于该芯片构建的物联网液位检测系统的架构设计、实现和实践案例。重点分析了系统设计原理、传感器节点实现、通信协议选择和数据
【Matlab中的collect函数:高级技巧与案例分析】

# 摘要
本文全面介绍Matlab中的collect函数,首先概述了collect函数的基本概念及其在符号计算中的应用。接着,详细探讨了collect函数的基础使用技巧,包括参数的输入规则、返回值的类型和特点,以及在简化表达式、合并多项式等基础用例中的
PAS2050标准与可持续发展:实现环境与商业的和谐共存

# 摘要
PAS2050标准作为一种衡量产品碳足迹和生命周期环境影响的规范,旨在推动全球可持续发展目标的实现。本文首先概述了PAS2050标准的理论基础,包括可持续发展的定义、标准的制定背景和主要内容。随后,文章详细探讨了实施PAS2050标准的策略,如组织层面的准备、产品生命周期环境影响评估以及碳足迹的量化与报告。进一步地,通过商业实践案例分析,本文揭示了环境责任与企业竞争力的关系,以及企业在实施该标准过程中可能遇
【批量修改简化】:Word跨文档操作功能的深度解读
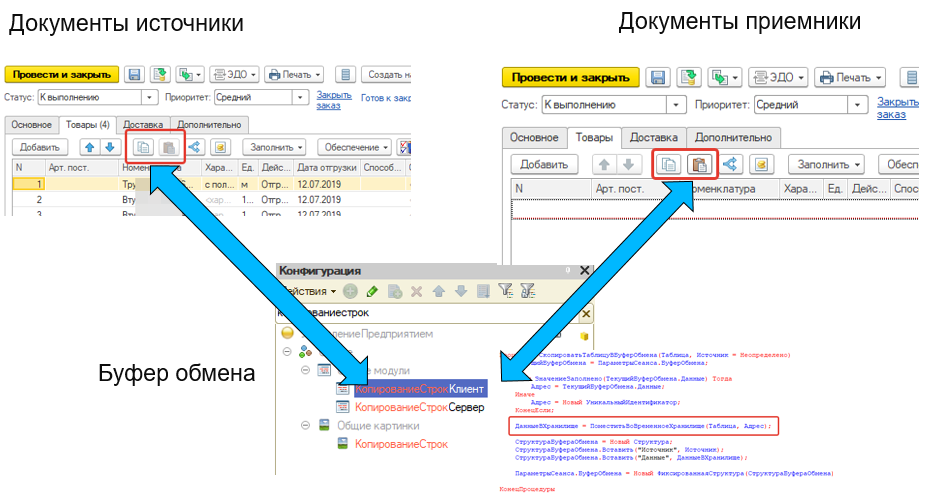
# 摘要
Word跨文档操作是提高文档处理效率和质量的关键技术,涵盖了从文档结构解析、技术原理、实践技巧到高级策略的全面探讨。本文首先介绍了Word文档的组织方式和标记语言XML分析,进而详细阐述了对象链接与嵌入(OLE)、文档对象模型(DOM)和VBA在实现跨文档操作中的核心作用。通过VBA脚本、宏和Word内置功能的实用技巧,本文为用户提供了批量处理和自动化操作的有效手段。此外,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )