MATLAB非线性规划敏感性分析:参数调整的4大实用技巧
发布时间: 2024-11-15 20:57:46 阅读量: 57 订阅数: 36 

WindowsQwen2.5VL环境搭建-执行脚本
# 1. MATLAB非线性规划概述
MATLAB作为高性能的数学计算和可视化软件,特别在非线性规划领域提供了一系列强大的工具箱,为优化问题的解决提供了便捷。非线性规划是优化理论的一个分支,其核心在于找到一组变量值,以最大化或最小化一个或多个非线性目标函数,同时满足一定数量的约束条件。这使得MATLAB在工程设计、经济管理、科学研究等众多领域应用广泛。在本章节中,我们将介绍非线性规划的基本概念、MATLAB非线性规划工具箱的概览,为后续深入讨论奠定基础。
# 2. 非线性规划基础理论
### 2.1 非线性规划问题的定义
非线性规划是一种数学优化方法,旨在找到一组最优决策变量的值,以最大化或最小化一个非线性目标函数,同时满足一组非线性约束条件。在这一节中,我们将深入探讨非线性规划问题的定义,理解其目标函数和约束条件的特性,并介绍可行域和最优解的基本概念。
#### 2.1.1 目标函数和约束条件
目标函数是定义在决策变量上的函数,表示优化问题所希望达到的目标。在非线性规划中,目标函数可以是任何形式的非线性表达式,包括但不限于多项式、指数和对数函数。它通常可以写成如下形式:
\[ \min / \max f(x) \]
其中,\( f(x) \) 为非线性目标函数,\( x \) 是决策变量组成的向量。
约束条件是对决策变量施加的限制,以确保解的可行性和实际意义。非线性规划中的约束可以是等式约束也可以是不等式约束。形式化表示如下:
\[ g_i(x) \leq 0 \quad (i=1,2,...,m) \] (不等式约束)
\[ h_j(x) = 0 \quad (j=1,2,...,p) \] (等式约束)
在这些表达式中,\( g_i(x) \) 和 \( h_j(x) \) 分别表示不等式和等式约束的函数,\( m \) 和 \( p \) 分别是不等式和等式约束的数量。
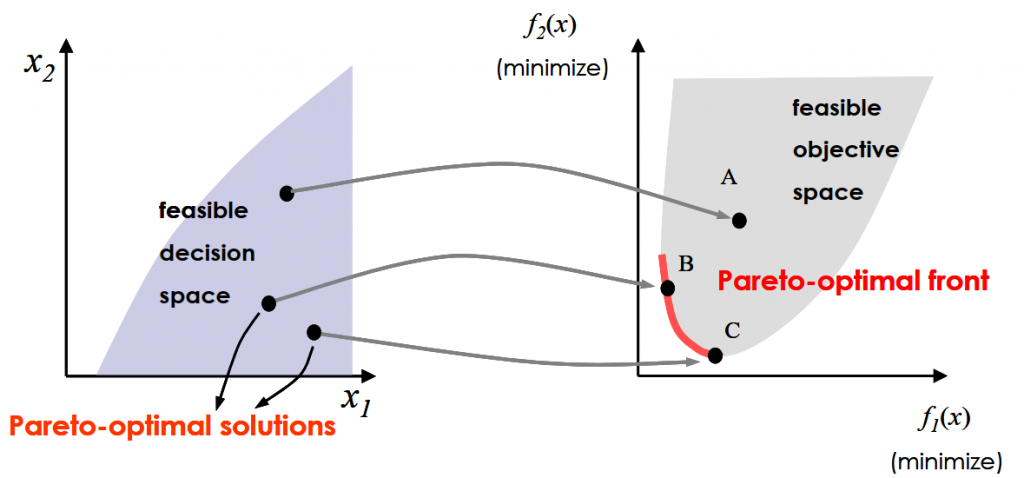
#### 2.1.2 可行域和最优解概念
在定义了目标函数和约束之后,我们可以定义一个由所有满足约束条件的决策变量向量组成的集合,这被称为问题的可行域。可行域的几何表示是一个多维空间中的区域,该区域由约束条件的边界所界定。
最优解是可行域中使得目标函数取得最小或最大值的点。若目标函数是最大化问题,则最优解是使得函数值最大的点;若目标函数是求最小值,则最优解是使得函数值最小的点。在实际问题中,最优解可能有多个(多重最优解),也可能不存在(不连续或者非闭合的可行域)。
### 2.2 数学模型构建与转化
在实际应用中,非线性规划问题往往来源于复杂的工程或经济系统。将这些实际问题转化为数学模型是解决它们的第一步。
#### 2.2.1 建模步骤和方法
建模步骤通常包括问题的抽象化、数学表达式的建立以及参数的确定。为了将实际问题转化为数学模型,我们遵循以下步骤:
1. **定义目标和变量:** 明确优化目标以及与之相关的决策变量。
2. **建立约束:** 根据实际情况和问题的限制条件建立约束方程。
3. **选择适当的函数形式:** 根据问题的特性和求解方法选择合适的目标函数和约束函数形式。
#### 2.2.2 模型转化与标准形式
为了使用现成的求解器,经常需要将实际问题转化为某些标准形式。在非线性规划中,一个常见的标准形式是:
\[ \min f(x) \]
\[ \text{subject to} \]
\[ g_i(x) \leq 0, \quad i = 1,...,m \]
\[ h_j(x) = 0, \quad j = 1,...,p \]
\[ l_k \leq x_k \leq u_k, \quad k = 1,...,n \]
这里,\( l_k \) 和 \( u_k \) 分别是决策变量 \( x_k \) 的下界和上界。这种形式的目标函数和约束条件能够覆盖大多数实际问题。
### 2.3 求解算法基础
求解非线性规划问题通常需要依赖于特定的数值算法,这些算法可以大致分为迭代方法和确定性方法。
#### 2.3.1 迭代方法简介
迭代方法通过一系列的计算步骤逐渐逼近最优解。这些方法通常需要一个初始解,并通过迭代更新解直到满足某些终止条件。常见的迭代方法包括梯度下降法、牛顿法、拟牛顿法等。
#### 2.3.2 梯度下降法和牛顿法
梯度下降法是一种基于梯度信息的迭代优化算法,适用于求解可微分的目标函数。其基本思想是沿着目标函数梯度的反方向(即梯度下降方向)来更新当前解,直至找到局部最小值。
牛顿法是一种二阶方法,利用目标函数的Hessian矩阵(二阶导数矩阵),旨在更加快速地收敛到局部最优解。牛顿法不仅使用一阶导数信息,还利用了二阶导数信息,因此往往比梯度下降法更快地找到最优解。
牛顿法可以写成迭代公式如下:
\[ x_{k+1} = x_k - H^{-1}_k \nabla f(x_k) \]
其中,\( x_k \) 是第 \( k \) 次迭代后的解,\( H_k \) 是目标函数在 \( x_k \) 处的Hessian矩阵,\( \nabla f(x_k) \) 是在 \( x_k \) 处的目标函数梯度。
在求解非线性规划问题的过程中,需要对迭代方法的选择进行慎重考虑,因为不同的算法适用于不同类型的问题。例如,梯度下降法在大规模问题中由于其计算效率高而被广泛使用,但容易陷入局部最优;牛顿法则在问题较为平滑且Hessian矩阵为正定时效果显著。
通过上述介绍,本章已经完成了对非线性规划基础理论的探讨,为接下来的内容奠定了扎实的基础。在下一章节,我们将深入MATLAB非线性规划工具箱,了解如何使用这些工具来求解复杂的非线性规划问题。
# 3. MATLAB非线性规划工具箱
## 3.1 问题定义与求解流程
### 3.1.1 fmincon函数使用
在MATLAB中,`fmincon` 是一个强大的工具,用于求解具有线性和非线性约束的非线性优化问题。它在工业、工程和金融等领域中被广泛使用,以解决复杂的最优化问题。
`fmincon` 函数的一般调用形式如下:
```matlab
[x, fval] = fmincon(fun, x0, A, b, Aeq, beq, lb, ub, nonlcon, options)
```
各参数的含义如下:
- `fun`:定义要最小化的目标函数。
- `x0`:优化变量的初始估计值。
- `A`,`b`:定义线性不等式约束 `A*x ≤ b`。
- `Aeq`,`beq`:定义线性等式约束 `Aeq*x = beq`。
- `lb`,`ub`:定义变量的下界和上界,形成一个有界的搜索空间。
- `nonlcon`:是一个函数句柄,用于定义非线性约束函数。
- `options`:是优化选项,用于配置算法的各个方面。
通过调整这些参数,可以灵活地定义和解决不同类型的优化问题。
### 3.1.2 求解过程的监控与调整
`fmincon` 提供了监控和调整优化求解过程的机制。通过设置 `options` 参数中的 `Display` 选项,用户可以选择不同级别的输出信息,以了解当前迭代的状态。
例如:
```matlab
options = optimoptions('fmincon','Display','iter');
[x, fval] = fmincon(@myfun, x0, A, b, Aeq, beq, lb, ub, @nonlcon, options);
```
这会在每次迭代中显示信息,帮助用户了解优化过程。
此外,`fmincon` 还可以通过 `Output` 函数参数来监控求解过程,这允许用户在每次迭代时运行自定义代码,例如记录迭代次数或计算额外的性能指标。
### 3.2 参数设定与算法选择
#### 3.2.1 算法参数的初始化
选择合适的算法参数是成功求解非线性规划问题的关键。MATLAB优化工具箱提供了多种优化算法,如内点法、序列二次规划法(SQP)和信赖域反射法等。
初始化参数时,需要考虑问题的性质和规模。例如,大尺度问题可能更适合选择内点法,因为它在处理大规模约束时更加高效。而对于需要高精度解的问题,则可能需要选择具有精细调整能力的算法,如SQP。
#### 3.2.2 不同算法的性能比较
不同算法的性能比较可以通过实际问题测试得出,MATLAB提供了`optimtool` GUI工具和`optimoptions`函数来设置不同的算法和参数,以比较它们在特定问题上的性能。
性能指标可能包括:
- 迭代次数:达到相同精度所需的迭代次数。
- 计算时间:算法求解问题所需的时间。
- 精度:得到的解与真实最优解之间的差距。
## 3.3 结果分析与验证
### 3.3.1 输出结果的解读
`fmincon` 返回的结果包含解向量 `x` 和目标函数在该点的值 `fval`。通过分析这些结果,可以了解优化问题的解和最优值。
此外,MATLAB还会返回附加的信息,如求解过程中的迭代历史和状态,以及最终的诊断信息,这有助于分析求解过程和判断是否得到理想的解决方案。
### 3.3.2 求解结果的验证技巧
验证优化结果通

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了 MATLAB 中遗传算法和非线性规划函数优化技术的应用。它提供了全面的指南,涵盖了遗传算法的技巧、非线性规划的策略、案例分析、多目标优化优势、调试秘诀、敏感性分析、算法对比、生物信息学应用、并行计算指南、参数调优以及在化学工程中的实战技巧。此外,它还介绍了遗传算法和模拟退火策略的互补性,帮助读者找到全局最优解。该专栏为优化问题提供了全面的解决方案,适用于各种领域的研究人员和从业者。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Adblock Plus高级应用:如何利用过滤器提升网页加载速度

# 摘要
本文全面介绍了Adblock Plus作为一款流行的广告拦截工具,从其基本功能到高级过滤策略,以及社区支持和未来的发展方向进行了详细探讨。首先,文章概述了Adb
【QCA Wi-Fi源代码优化指南】:性能与稳定性提升的黄金法则

# 摘要
本文对QCA Wi-Fi源代码优化进行了全面的概述,旨在提升Wi-Fi性能和稳定性。通过对QCA Wi-Fi源代码的结构、核心算法和数据结构进行深入分析,明确了性能优化的关键点。文章详细探讨了代码层面的优化策略,包括编码最佳实践、性能瓶颈的分析与优化、以及稳定性改进措施。系统层面
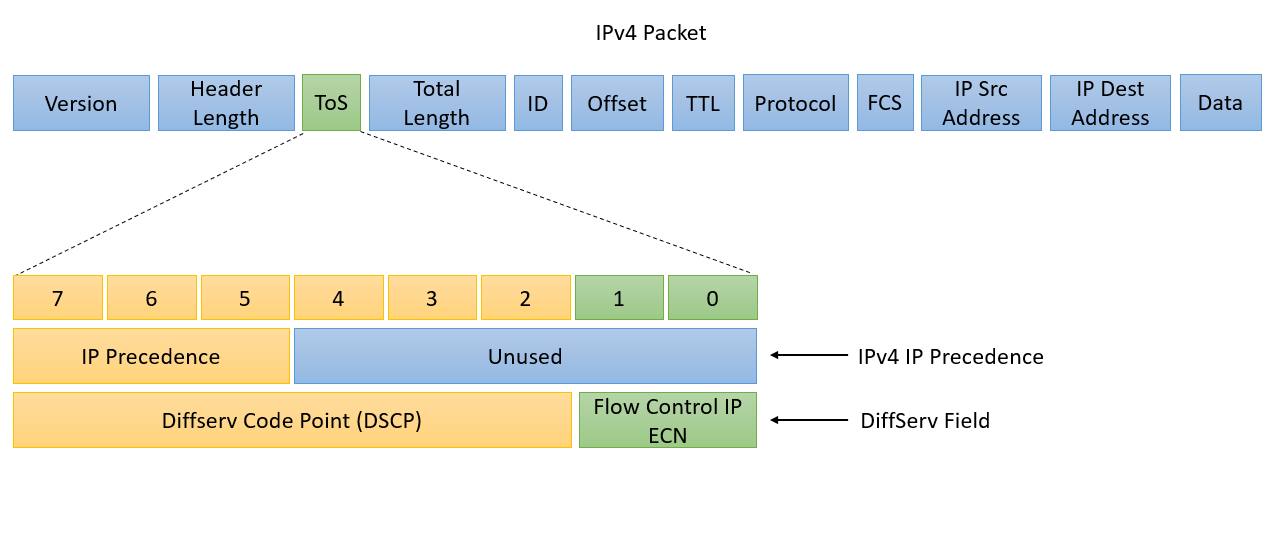
网络数据包解码与分析实操:WinPcap技术实战指南
# 摘要
随着网络技术的不断进步,网络数据包的解码与分析成为网络监控、性能优化和安全保障的重要环节。本文从网络数据包解码与分析的基础知识讲起,详细介绍了WinPcap技术的核心组件和开发环境搭建方法,深入解析了数据包的结构和解码技术原理,并通过实际案例展示了数据包解码的实践过程。此外,本文探讨了网络数据分析与处理的多种技术,包括数据包过滤、流量分析,以及在网络安全中的应用,如入侵检测系统和网络
【EMMC5.0全面解析】:深度挖掘技术内幕及高效应用策略

# 摘要
EMMC5.0技术作为嵌入式存储设备的标准化接口,提供了高速、高效的数据传输性能以及高级安全和电源管理功能。本文详细介绍了EMMC5.0的技术基础,包括其物理结构、接口协议、性能特点以及电源管理策略。高级特性如安全机制、高速缓存技术和命令队列技术的分析,以及兼容性和测试方法的探讨,为读者提供了全面的EMMC5.0技术概览。最后,文章探讨了EMMC5.0在嵌入式系统中的应用以及未来的发展趋势和高效应用策略,强调了软硬
【高级故障排除技术】:深入分析DeltaV OPC复杂问题

# 摘要
本文旨在为DeltaV系统的OPC故障排除提供全面的指导和实践技巧。首先概述了故障排除的重要性,随后探讨了理论基础,包括DeltaV系统架构和OPC技术的角色、故障的分类与原因,以及故障诊断和排查的基本流程。在实践技巧章节中,详细讨论了实时数据通信、安全性和认证
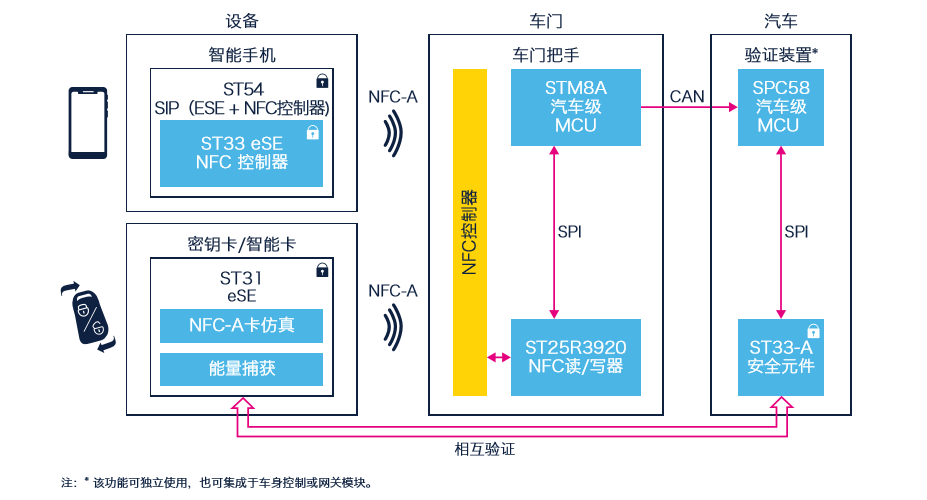
手把手教学PN532模块使用:NFC技术入门指南
# 摘要
NFC(Near Field Communication,近场通信)技术是一项允许电子设备在短距离内进行无线通信的技术。本文首先介绍了NFC技术的起源、发展、工作原理及应用领域,并阐述了NFC与RFID(Radio-Frequency Identification,无线射频识别)技术的关系。随后,本文重点介绍了PN532模块的硬件特性、配置及读写基础,并探讨了
PNOZ继电器维护与测试:标准流程和最佳实践

# 摘要
PNOZ继电器作为工业控制系统中不可或缺的组件,其可靠性对生产安全至关重要。本文系统介绍了PNOZ继电器的基础知识、维护流程、测试方法和故障处理策略,并提供了特定应用案例分析。同时,针对未来发展趋势,本文探讨了新兴技术在PNOZ继电器中的应用前景,以及行业标准的更新和最佳实践的推广。通过对维护流程和故障处理的深入探讨,本文旨在为工程师提供实用的继电器维护与故障处
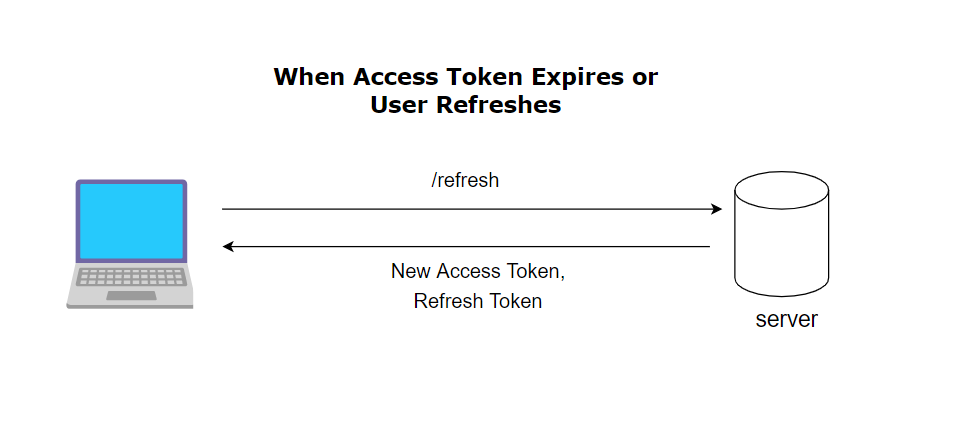
【探索JWT扩展属性】:高级JWT用法实战解析
# 摘要
本文旨在介绍JSON Web Token(JWT)的基础知识、结构组成、标准属性及其在业务中的应用。首先,我们概述了JWT的概念及其在身份验证和信息交换中的作用。接着,文章详细解析了JWT的内部结构,包括头部(Header)、载荷(Payload)和签名(Signature),并解释了标准属性如发行者(iss)、主题(sub)、受众(aud
Altium性能优化:编写高性能设计脚本的6大技巧

# 摘要
本文系统地探讨了基于Altium设计脚本的性能优化方法与实践技巧。首先介绍了Altium设计脚本的基础知识和性能优化的重要性,强调了缩短设计周期和提高系统资源利用效率的必要性。随后,详细解析了Altium设计脚本的运行机制及性能分析工具的应用。文章第三章到第四章重点讲述了编写高性能设计脚本的实践技巧,包括代码优化原则、脚
Qt布局管理技巧

# 摘要
本文深入探讨了Qt框架中的布局管理技术,从基础概念到深入应用,再到实践技巧和性能优化,系统地阐述了布局管理器的种类、特点及其适用场景。文章详细介绍了布局嵌套、合并技术,以及
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )