【Go并发网络编程】:Fan-out_Fan-in模式在HTTP服务中的优化
发布时间: 2024-10-22 22:44:39 阅读量: 2 订阅数: 2 

# 1. Go并发网络编程概述
Go语言凭借其简洁的语法和高效的并发模型,成为了现代网络编程领域中备受欢迎的编程语言。在本章中,我们将从宏观的角度审视Go语言在网络编程中的应用,特别是其在并发控制方面的独特优势。我们将探讨为什么Go语言特别适合编写网络服务,并介绍Go并发网络编程的基本概念和常用模式。
网络编程,特别是并发网络编程,要求程序能够高效地处理多用户的同时连接和请求。Go语言通过Goroutine提供了一种轻量级的线程机制,允许程序员以极低的开销创建数以万计的并发任务。同时,Go的Channel提供了一种优雅的同步和通信机制,简化了多线程间的通信。
在深入探讨并发模型和同步机制之前,先对Go并发网络编程的基本术语和工作原理有一个清晰的认识是非常有必要的。本章将为读者搭建起一个坚实的基础,以便于后续章节对Go并发编程特性和模式的深入分析。
# 2. Go语言并发模型基础
## 2.1 Go语言的并发特性
### 2.1.1 Goroutine的启动与管理
Goroutine 是 Go 语言中最基本的并发执行单元,与传统语言的线程不同,Goroutine 是一种由 Go 运行时管理的轻量级线程。启动 Goroutine 仅需在函数调用前添加 `go` 关键字:
```go
go function()
```
如此简单的语法使得 Goroutine 的创建成本极低,大约只占操作系统线程的几百分之一。
#### Goroutine 管理机制
Goroutine 的管理由 Go 的调度器负责,调度器是一个高度优化的 M:N 调度器,这意味着在 n 个 Goroutine 和 m 个系统线程之间进行调度。Go 的运行时调度器能够高效地在数量较少的 OS 线程上调度大量的 Goroutine,这种机制基于以下概念:
1. **G(Goroutine)**:表示 Goroutine 的轻量级线程上下文。
2. **M(Machine)**:代表操作系统的线程。
3. **P(Processor)**:处理器,它作为 M 和 G 之间协调的中间层,它维护了一个本地 Goroutine 队列,并且负责分派工作给 M。
调度器使用称为 "work stealing" 的策略来保证各个 P 的负载均衡,一个 P 无 Goroutine 可运行时可以从其他 P 的队列窃取 Goroutine 来执行。
#### 实践:如何有效管理 Goroutine
在实际编程中,管理大量的 Goroutine 可能会遇到各种问题,如 Goroutine 泄露,即创建的 Goroutine 没有得到适当的清理。为了避免这类问题,可以采用以下策略:
1. **使用 Channel 通信**:Goroutine 之间通过 Channel 进行通信,当不需要 Goroutine 时,可以通过关闭 Channel 或发送关闭信号通知 Goroutine 完成执行。
2. **使用 WaitGroup**:`sync.WaitGroup` 用来等待一组 Goroutine 的完成。在 Goroutine 开始前将 WaitGroup 的计数加一,在 Goroutine 执行完毕后调用 `Done()` 减少计数,最后使用 `Wait()` 阻塞主程序直到所有 Goroutine 完成。
3. **Context 传播**:`context` 包提供了可取消的 Goroutine 链,可以有效地传播取消信号或超时信息到 Goroutine 树。
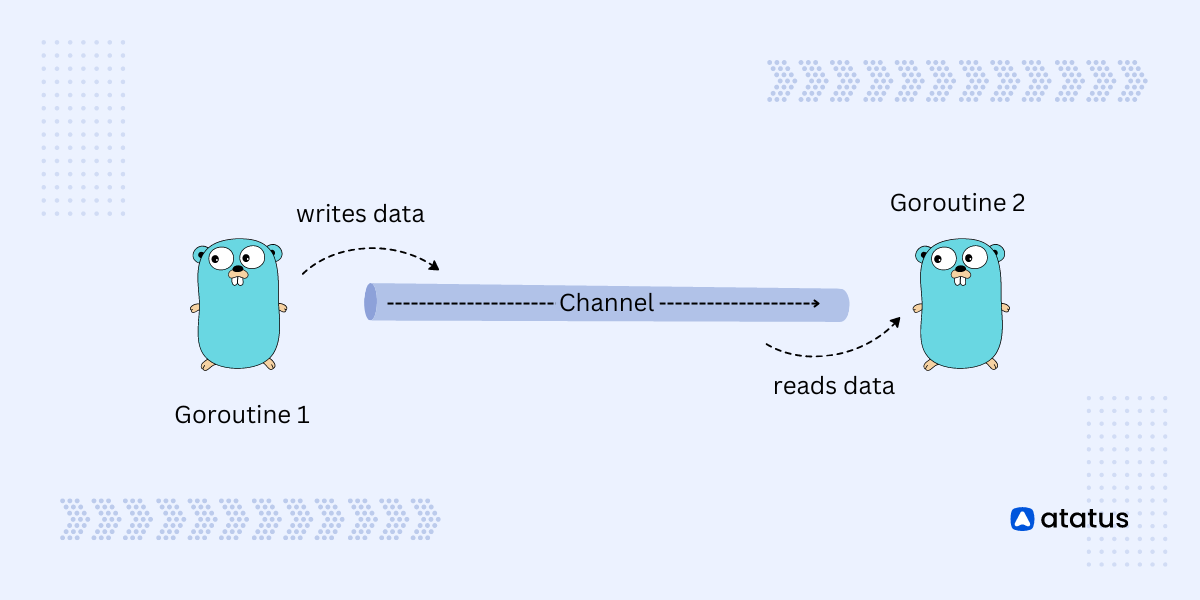
### 2.1.2 Channel的使用与原理
Channel 是 Go 语言中用于 Goroutine 间通信的同步原语。它允许数据安全地从一个 Goroutine 传输到另一个 Goroutine。Channel 的设计灵感来源于 CSP(Communicating Sequential Processes)并发模型。
#### Channel 基本语法
创建一个 Channel 相当简单:
```go
ch := make(chan int) // 创建一个整数类型的 Channel
```
你可以通过 `ch <- value` 将数据发送到 Channel,通过 `<-ch` 从 Channel 接收数据。
#### Channel 的类型
Channel 可以是有缓冲的,也可以是无缓冲的。无缓冲的 Channel 是指发送和接收操作必须同步进行,而有缓冲的 Channel 在缓冲区满之前可以发送数据,在缓冲区空之前可以接收数据。
```go
ch := make(chan int, 10) // 创建一个容量为 10 的缓冲型 Channel
```
#### Channel 的工作原理
Channel 的内部是一个环形队列实现的,有三个主要指针:读指针、写指针和缓冲区队尾指针。每个 Channel 都有一个关联的互斥锁(mutex)来控制对其内部状态的访问。
- 当向 Channel 发送数据时:
1. 如果 Channel 是无缓冲的,发送者会阻塞,直到有接收者准备就绪。
2. 如果 Channel 是有缓冲的且缓冲区未满,数据将被放入缓冲区,并唤醒等待接收的 Goroutine。
3. 如果缓冲区已满,发送者将被阻塞,直到缓冲区有空间。
- 当从 Channel 接收数据时:
1. 如果 Channel 是无缓冲的,接收者会阻塞,直到有发送者准备就绪。
2. 如果 Channel 是有缓冲的且缓冲区不为空,数据将从缓冲区中取出,并唤醒等待发送的 Goroutine。
3. 如果缓冲区为空,接收者将被阻塞,直到有数据被发送到 Channel。
#### 实践:使用 Channel 管理 Goroutine 生命周期
使用 Channel 管理 Goroutine 的生命周期是一种非常优雅的方式。在启动 Goroutine 时,可以将它们输出到 Channel 中,然后在主 Goroutine 中等待所有 Channel 的关闭。
```go
func worker(id int, jobs <-chan int, results chan<- int) {
for j := range jobs {
fmt.Println("worker", id, "processing job", j)
results <- j * 2
}
}
func main() {
jobs := make(chan int, 100)
results := make(chan int, 100)
for w := 1; w <= 3; w++ {
go worker(w, jobs, results)
}
for j := 1; j <= 9; j++ {
jobs <- j
}
close(jobs)
for a := 1; a <= 9; a++ {
<-results
}
}
```
在上面的例子中,我们创建了一个有缓冲的 Channel 来分配工作给三个工作者 Goroutine,并使用另一个 Channel 来接收结果。工作者 Goroutine 会从 `jobs` Channel 接收工作,完成后将结果发送到 `results` Channel。主 Goroutine 在分配完所有工作后关闭 `jobs` Channel,这样工作者 Goroutine 就知道没有更多的工作了,并开始关闭。
这样的模式有利于精确控制 Goroutine 的生命周期,确保主程序完成工作后所有 Goroutine 都得到适当处理。
## 2.2 Go语言的同步机制
### 2.2.1 WaitGroup的工作原理
`sync.WaitGroup` 用于等待一组 Goroutine 完成。在使用前需要先声明一个实例:
```go
var wg sync.WaitGroup
```
添加要等待的 Goroutine 数量使用 `Add` 方法:
```go
wg.Add(1)
```
在 Goroutine 内部,当执行完毕后调用 `Done` 方法通知 WaitGroup 此 Goroutine 已经完成:
```go
defer wg.Done()
```
主 Goroutine 使用 `Wait` 方法阻塞直到所有的 Goroutine 都调用了 `Done` 方法:
```go
wg.Wait()
```
#### WaitGroup 内部原理
`sync.WaitGroup` 的内部实现涉及到了计数器、信号等待以及信号通知等机制。具体细节为:
- `WaitGroup` 拥有一个计数器,该计数器记录了需要等待的 Goroutine 数量。
- 当 `Add` 方法被调用时,计数器增加。
- 每个 Goroutine 在退出前调用 `Done` 方法,该方法将计数器减一。
- `Wait` 方法等待计数器减至零。如果计数器在调用 `Wait` 前已经是零,则不会阻塞。
#### WaitGroup 使用注意事项
使用 `sync.WaitGroup` 时需要注意以下几点:
- 必须确保在 Goroutine 退出前调用 `Done` 方法,通常使用 `defer` 实现。
- 不要对同一个 `WaitGroup` 实例同时使用 `Add` 和 `Done`。
- 不要复制 `WaitGroup` 实例,如果需要在多个函数间传递,应该传递指针。
### 2.2.2 Mutex和RWMutex的使用场景
`sync.Mutex` 和 `sync.RWMutex` 是 Go 语言提供的基本的互斥锁机制,用于保护共享资源不被多个 Goroutine 同时访问。
#### Mutex 使用场景
`sync.Mutex` 是互斥锁,提供 `Lock` 和 `Unlock` 两个方法:
```go
var mu sync.Mutex
mu.Lock()
// 临界区代码
mu.Unlock()
```
在临界区代码中,只有一个 Goroutine 可以执行。如果其他 Goroutine 也试图访问该区域,则会被阻塞,直到锁被释放。
#### RWMutex 使用场景
`sync.RWMutex` 是读写锁,它允许多个读者同时读取数据,但写入时需要独占访问。读取前调用 `RLock` 方法,释放时调用 `RUnlock`;写入前调用 `Lock` 方法,释放时调用 `Unlock`:
```go
var mu sync.RWMutex
mu.RLock()
// 读取数据
mu.RUnlock()
// 或者
mu.Lock()
// 写入数据
mu.Unlock()
```
#### Mutex 与 RWMutex 对比
- `Mutex` 非常适合于单写多读的场景。
- `RWMutex` 则适用于读多写少的场景,可以提高并发性能,因为允许多个读者同时进行。
### 2.2.3 Cond的高级同步控制
`sync.Cond` 是 Go 提供的条件变量,允许进行更加高级的并发控制。条件变量是允许在某个条件下进行等待,直到其他 Goroutine 发送通知。
```go
cond
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Go 语言中的 Fan-out/Fan-in 并发模式,旨在帮助开发者掌握此模式的各个方面。专栏涵盖了 Fan-out/Fan-in 的概念、策略、性能优化、开发技巧、实战案例、错误处理、同步问题、网络编程、数据库交互、缓存应用、消息队列、分布式计算、单元测试、监控策略等多个主题。通过一系列文章,读者将全面了解 Fan-out/Fan-in 模式在 Go 并发编程中的重要性,并掌握其高效应用的技巧,从而提升并发应用程序的性能和可靠性。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Java CDI在微服务中的应用:掌握5大挑战与机遇
# 1. Java CDI概述与微服务架构
## 1.1 Java CDI的定义和目的
**CDI(Contexts and Dependency Injection)** 是Java EE 6规范中的一部分,提供了一种强大的依赖注入机制,用于解决Java应用中对象依赖关系管理的复杂性。CDI的核心目的在于提供一种统一的、声明式的依赖注入方法,从而
Java EE中的异步处理与响应式编程:构建高效应用的先进理念

# 1. 异步处理与响应式编程概述
在当今的软件开发领域,异步处理与响应式编程是提升应用程序性能和效率的两大关键技术。本章将对这两项技术进行基础概述,为读者搭建起一个整体的理解框架。
## 1.1 异步处理与响应式编程的定义
异步处理是一种编程范式,允许计算过程在等待外部操作(如I/O操作或长时间计算)完成时,继续执行后续任务而不是阻塞等待。
C#自定义验证与数据注解对决:选择最佳验证策略
# 1. C#中的数据验证概述
数据验证是确保数据准确性和完整性的关键步骤。在C#中,数据验证通常在数据进入系统之前进行,以确保数据格式正确,并符合应用的业务逻辑。有效的数据验证能够预防错误的数据输入,并提高应用程序的可靠性。
## 数据验证的重要性
数据验证不仅是为了满足前端界面的用户体验,更重要的是为了保障应用程序的健壮性。通过验证可以防止注入攻击、数据损坏和不一致等问题,从而维护系统的稳定运行。
## C#中验证数据的方法
在C#
【Go并发监控策略】:Fan-out_Fan-in模式的实时监控与性能分析
# 1. Go并发模式的理论基础
在深入了解和使用Go语言的并发模型之前,我们需要从理论层面打下坚实的基础。Go语言是一种支持并发编程的语言,其并发模型基于CSP(Communicating Sequential Processes,通信顺序进程)理论。这一理论由Tony Hoare提出,它强调了进程之间的通信而非进程的直接共享资源。
## 1.1 并发与
***配置可测试性指南:编写配置相关单元测试的技巧

# 1. 配置可测试性的概念与重要性
## 1.1 什么是配置可测试性
配置可测试性是指软件系统设计中为了便于测试而采取的一系列措施,使得系统能够在不同的配置设置下快速有效地进行测试。它不仅关注软件的内部逻辑,还包括软件运行时的外部环境,如操作系统的配置、硬件资源的限制等。
## 1.2 配置可测试性的必要性
良好的配置可测试性设计对于确保软件的稳定性和质量至关重要。它能够帮助开发者快速定位问题,减少维
std::deque自定义比较器:深度探索与排序规则

# 1. std::deque容器概述与标准比较器
在C++标准模板库(STL)中,`std::deque`是一个双端队列容器,它允许在容器的前端和后端进行快速的插入和删除操作,而不影响容器内其他元素的位置。这种容器在处理动态增长和缩减的序列时非常有用,尤其是当需要频繁地在序列两端添加或移除元素时。
`std::deque`的基本操作包括插入、删除、访问元素等,它的内部实现通常采用一段连续的内存块,通
【Go错误处理模式深入】:错误处理的函数式编程方法,优化性能影响
# 1. Go语言中的错误处理基础
Go语言以其简洁明了的语法和高效的并发处理机制赢得了众多开发者的青睐。然而,对于Go中的错误处理,许多初学者可能会觉得有些困惑。本章节将为读者提供一个关于Go语言错误处理的基础介绍,包括错误的定义、错误处理的常见模式以及如何在代码中正确地使用这些模式。
## 1.1 错误的定义和类型
在Go语言中,错误被定义为实现了`erro
【C++迭代器使用】:std::unordered_map迭代器失效问题的应对策略
# 1. C++迭代器与std::unordered_map基础
C++中的迭代器是一种通用的概念,它提供了一种方法来访问容器中的元素,而无需了解容器的内部结构。迭代器在C++标准库中无处不在,是算法和容器之间的重要桥梁。在本章节,我们将介绍迭代器的基本概念,并深入了解std::unordered_map容器,了解其如何高效地管理键值对集合。
## 1.1 迭代器的基本概
C++ unordered_set的内存管理
# 1. C++ unordered_set简介和特性
C++标准库中的`unordered_set`是一种基于哈希表实现的容器,它允许我们存储唯一键值的集合。与传统的`set`不同,`unordered_set`不保证内部元素的顺序,但它提供了平均常数时间复杂度`O(1)`的查找、插入和删除操作。
## 1.1 基本概念和用途
`unordered_set`主要用于需要快速检索但不关心元素顺序的场景。例如,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )