RT-Thread基础概述与安装配置
发布时间: 2024-02-14 03:33:45 阅读量: 57 订阅数: 27 
# 1. 简介
## 1.1 RT-Thread是什么
RT-Thread是一个开源的实时操作系统(RTOS),专注于物联网和嵌入式系统领域。它具有高效、灵活和可裁剪的特点,适用于各种资源受限的嵌入式设备。
## 1.2 RT-Thread的特点
RT-Thread具有以下几个特点:
- **实时性**: RT-Thread采用抢占式多任务调度机制,具有非常好的实时性能,能够满足对任务处理时间要求严格的应用场景。
- **可裁剪性**: RT-Thread的内核和组件都是可裁剪的,可以按照实际需求进行灵活配置,只包含必要的功能,从而减小系统资源开销。
- **丰富的组件和库**: RT-Thread提供了众多实用的组件和库,如网络协议栈、文件系统、图形库等,方便开发者快速构建应用程序。
- **良好的兼容性**: RT-Thread兼容POSIX标准,提供了丰富的API函数,方便移植和开发。
- **友好的开发工具**: RT-Thread提供了可视化的配置工具和调试工具,简化了开发流程,提高了开发效率。
## 1.3 RT-Thread的应用场景
RT-Thread广泛应用于各种物联网和嵌入式系统中,包括但不限于以下领域:
- **智能家居**: RT-Thread可以用于控制智能家居设备,如智能灯具、智能门锁等,实现远程控制、定时开关等功能。
- **工业自动化**: RT-Thread可以用于工业控制系统,如PLC(可编程逻辑控制器)、工业机器人等,实现实时监测、控制和调度。
- **车载系统**: RT-Thread可以用于车载系统,如车载娱乐系统、车载导航系统等,提供实时的音视频处理和通信功能。
- **物联网设备**: RT-Thread可以用于各种物联网设备,如智能传感器、无线通信模块等,实现数据采集、通信和云端连接。
总之,RT-Thread在各种资源受限的嵌入式系统中,具有灵活、可裁剪和高性能的特点,适用于各种实时应用场景。在接下来的章节中,我们将深入了解RT-Thread的架构、安装配置、应用开发、调试测试以及进阶扩展等方面内容。
# 2. RT-Thread的架构
RT-Thread采用模块化的架构,核心部分包括内核、组件、库和设备驱动。这种模块化的设计使得RT-Thread具有高度的可扩展性和可定制化。
## 2.1 内核
RT-Thread内核是整个系统的核心,它负责任务调度、线程管理、内存管理、系统时钟和中断管理等。RT-Thread内核可以根据用户的需求进行配置,支持多任务、多线程、实时调度和优先级管理。
下面是一个简单的示例,展示了如何创建一个任务并实现线程的调度:
```python
#include <rtthread.h>
static rt_thread_t thread1;
static rt_thread_t thread2;
static void thread_entry1(void* parameter)
{
while (1)
{
rt_kprintf("Hello from Thread 1!\n");
rt_thread_yield();
}
}
static void thread_entry2(void* parameter)
{
while (1)
{
rt_kprintf("Hello from Thread 2!\n");
rt_thread_delay(1000);
}
}
int rt_application_init()
{
thread1 = rt_thread_create("thread1", thread_entry1, RT_NULL, 512, 10, 10);
thread2 = rt_thread_create("thread2", thread_entry2, RT_NULL, 512, 20, 10);
rt_thread_startup(thread1);
rt_thread_startup(thread2);
return 0;
}
```
在上述代码中,通过`rt_thread_create`函数创建了两个线程`thread1`和`thread2`,并通过`rt_thread_startup`函数启动了这两个线程。`thread1`使用`rt_thread_yield`函数进行线程切换,而`thread2`则使用`rt_thread_delay`函数进行延时。
## 2.2 组件
RT-Thread提供了许多常用的组件,包括网络协议栈、文件系统、图形用户界面、通信协议和传感器驱动等。这些组件可以根据需求进行选择和配置,以实现各种不同的功能和应用。
以下是一个简单的示例,展示了如何使用网络组件进行网络通信:
```python
#include <rtthread.h>
#include <lwip/netif.h>
#include <lwip/sockets.h>
int rt_application_init()
{
struct netif* netif = netif_add(NULL, NULL, NULL, NULL, NULL, NULL);
if (netif != NULL) {
netif_set_up(netif);
int sockfd = socket(AF_INET, SOCK_STREAM, 0);
if (sockfd >= 0) {
struct sockaddr_in addr;
addr.sin_family = AF_INET;
addr.sin_port = htons(1234);
addr.sin_addr.s_addr = inet_addr("192.168.0.1");
if (connect(sockfd, (struct sockaddr*)&addr, sizeof(addr)) == 0) {
char buffer[256];
recv(sockfd, buffer, sizeof(buffer), 0);
rt_kprintf("Received data: %s\n", buffer);
}
closesocket(sockfd);
}
}
return 0;
}
```
在上述代码中,通过`netif_add`函数添加了一个网络接口,通过`netif_set_up`函数将接口设置为启动状态。然后使用`socket`函数创建了一个套接字,并使用`connect`函数连接到指定的IP地址和端口。最后使用`recv`函数接收数据并输出到终端。
## 2.3 库
RT-Thread提供了许多常用的库,包括数据结构、字符串处理、数学运算、文件操作和图形处理等。这些库可以在应用程序中直接使用,以实现各种不同的功能和算法。
以下是一个简单的示例,展示了如何使用字符串处理库进行字符串拼接:
```python
#include <rtthread.h>
#include <string.h>
int rt_application_init()
{
char str1[10] = "Hello";
char str2[10] = ", RT-Thread!";
char result[20];
strcpy(result, str1);
strcat(result, str2);
rt_kprintf("Result: %s\n", result);
return 0;
}
```
在上述代码中,通过`strcpy`函数将字符串`str1`复制到`result`中,再使用`strcat`函数将字符串`str2`追加到`result`中。最后输出拼接后的字符串`result`。
## 2.4 设备驱动
RT-Thread提供了丰富的设备驱动支持,包括串口、SPI、I2C、GPIO和网络接口等。这些设备驱动可以通过RT-Thread的设备驱动框架进行管理和操作,从而实现与外部硬件设备的交互。
以下是一个简单的示例,展示了如何使用GPIO设备驱动实现LED闪烁:
```python
#include <rtthread.h>
#include <rtdevice.h>
void led_thread_entry(void* parameter)
{
rt_device_t led = rt_device_find("led");
rt_device_open(led, RT_DEVICE_FLAG_WRONLY);
while (1)
{
rt_device_write(led, 0, RT_NULL, 1);
rt_thread_delay(500);
rt_device_write(led, 1, RT_NULL, 1);
rt_thread_delay(500);
}
}
int rt_application_init()
{
rt_thread_t led_thread = rt_thread_create("led", led_thread_entry, RT_NULL, 512, 10, 10);
rt_thread_startup(led_thread);
return 0;
}
```
在上述代码中,通过`rt_device_find`函数查找名为"led"的设备,并通过`rt_device_open`函数打开设备。然后在循环中使用`rt_device_write`函数控制LED的亮灭状态,通过`rt_thread_delay`函数实现LED闪烁的间隔。
以上是RT-Thread的架构及其各个部分的简单介绍,通过不同的组合和配置,可以实现各种不同的应用和功能。接下来,我们将详细说明RT-Thread的安装和配置过程。
# 3. RT-Thread的安装和配置
在开始使用RT-Thread之前,我们需要先进行安装和配置。本章将详细介绍RT-Thread的安装和配置步骤,包括硬件准备、系统下载和编译、配置RT-Thread以及常见问题的解决方法。
### 3.1 硬件准备
在安装和配置RT-Thread之前,我们需要准备一些硬件设备。首先,我们需要选择一块开发板作为目标平台,确保该开发板支持RT-Thread的运行。其次,确保开发板上已经连接好适配器,如串口适配器、JTAG适配器等,以便进行程序的下载和调试。最后,确保开发板上的按键、LED等外设已正确连接,以便后续的应用开发和测试。
### 3.2 系统下载和编译
接下来,我们需要下载RT-Thread的源代码并进行编译。首先,访问RT-Thread官网(https://www.rt-thread.org/)下载最新版本的RT-Thread源代码。
```bash
// 下载RT-Thread源代码
$ git clone https://github.com/RT-Thread/rt-thread.git
```
下载完成后,进入源代码目录,执行如下命令进行编译:
```bash
// 进入RT-Thread源代码目录
$ cd rt-thread
// 执行配置命令
$ scons --menuconfig
// 进行编译
$ scons
```
### 3.3 配置RT-Thread
在进行编译之前,我们还需要对RT-Thread进行一些配置。通过执行`scons --menuconfig`命令,我们可以打开RT-Thread的配置菜单,进行各种配置项的设置。
在配置菜单中,我们可以选择开启或关闭某些功能模块,设置系统的内存大小、线程数量等参数,选择适配的开发板类型等。配置完成后,保存配置并退出。
### 3.4 常见问题解决
在安装和配置RT-Thread的过程中,可能会遇到一些常见问题。下面列出几个常见问题及解决方法:
- 问题1:编译错误,提示缺少某些库文件。
解决方法:检查编译环境是否正确安装,确认所需的库文件是否存在。
- 问题2:系统烧写失败,开发板无法正常运行。
解决方法:检查烧写工具和连接线是否正常工作,确认烧写文件是否正确。
- 问题3:系统运行出现异常或死机。
解决方法:检查配置文件和代码,确认是否存在逻辑错误或死循环等问题。
- 问题4:外设无法正常工作。
解决方法:检查外设连接是否正确,确认驱动程序是否正确加载。
在解决问题时,通常需要通过查看日志、调试代码等方式进行排查。如果遇到无法解决的问题,可以到RT-Thread的官方论坛(https://club.rt-thread.org/)提问,寻求帮助。
总结:
本章介绍了RT-Thread的安装和配置方法,包括硬件准备、系统下载和编译、配置RT-Thread以及常见问题的解决方法。正确的安装和配置是使用RT-Thread的基础,也是进行后续应用开发的必要步骤。在安装和配置过程中,可能会遇到一些问题,需要仔细排查和解决。
# 4. RT-Thread的应用开发
在本章中,我们将介绍如何在RT-Thread中进行应用开发。我们将重点讨论RT-Thread的编程接口、应用程序开发流程、创建线程和任务、以及任务间通信的方法。
### 4.1 RT-Thread的编程接口
RT-Thread提供了丰富的编程接口,用于开发应用程序。以下是一些常用的API:
- 线程操作:rt_thread_t、rt_thread_create()、rt_thread_delete()
```
#include <rtthread.h>
static rt_thread_t tid;
static void thread_entry(void *parameter)
{
// 线程的入口函数
}
int main(void)
{
tid = rt_thread_create("thread", thread_entry, RT_NULL, 512, 10, 10);
rt_thread_startup(tid);
return 0;
}
```
- 互斥锁操作:rt_mutex_t、rt_mutex_init()、rt_mutex_take()、rt_mutex_release()
```
#include <rtthread.h>
static rt_mutex_t mutex;
void task_entry(void *parameter)
{
rt_mutex_take(&mutex, RT_WAITING_FOREVER);
// 临界区代码
rt_mutex_release(&mutex);
}
int main(void)
{
rt_mutex_init(&mutex, "mutex", RT_IPC_FLAG_FIFO);
// 创建任务并运行
return 0;
}
```
- 队列操作:rt_queue_t、rt_queue_create()、rt_queue_send()、rt_queue_recv()
```
#include <rtthread.h>
static rt_queue_t queue;
void task_entry(void *parameter)
{
rt_uint8_t data = 0;
rt_queue_send(queue, &data, sizeof(rt_uint8_t));
}
int main(void)
{
queue = rt_queue_create("queue", sizeof(rt_uint8_t), 10, RT_IPC_FLAG_FIFO);
// 创建任务并运行
return 0;
}
```
### 4.2 应用程序开发流程
在RT-Thread中进行应用程序开发的一般流程如下:
1. 配置RT-Thread内核或选择合适的软件包。
2. 编写应用程序代码。
3. 编译、链接并生成可执行文件。
4. 将可执行文件烧录至目标设备。
5. 在目标设备上运行应用程序。
### 4.3 创建线程和任务
在RT-Thread中,线程是独立运行的基本单位,可以使用rt_thread_create()函数创建线程。以下是一个简单示例:
```c
#include <rtthread.h>
static rt_thread_t tid;
static void thread_entry(void *parameter)
{
// 线程的入口函数
}
int main(void)
{
tid = rt_thread_create("thread", thread_entry, RT_NULL, 512, 10, 10);
rt_thread_startup(tid);
return 0;
}
```
在上述示例中,首先使用rt_thread_create()函数创建了一个名为"thread"的线程,指定了线程的入口函数为thread_entry(),并传入一些额外的参数。然后使用rt_thread_startup()函数启动线程。
### 4.4 任务间通信
在RT-Thread中,任务之间可以通过多种方式进行通信,如互斥锁、信号量、消息队列等。以下是一个使用信号量进行任务间通信的示例:
```c
#include <rtthread.h>
static rt_sem_t sem;
void task1_entry(void *parameter)
{
// 任务1的代码
rt_sem_release(&sem);
}
void task2_entry(void *parameter)
{
rt_sem_take(&sem, RT_WAITING_FOREVER);
// 任务2的代码
}
int main(void)
{
rt_sem_init(&sem, "my_sem", 1, RT_IPC_FLAG_FIFO);
// 创建任务1和任务2,并运行
return 0;
}
```
在上述示例中,首先使用rt_sem_init()函数创建了一个名为"my_sem"的信号量,初始值为1。在任务1的代码中,通过rt_sem_release()函数释放信号量;在任务2的代码中,通过rt_sem_take()函数获取信号量。
这样,任务1和任务2就可以通过信号量实现同步和互斥的通信。
这就是RT-Thread的应用开发的基本步骤和方法,通过灵活使用编程接口和任务间通信机制,可以实现复杂的嵌入式应用程序开发。
# 5. RT-Thread的调试与测试
在软件开发过程中,调试与测试是至关重要的环节。RT-Thread提供了丰富的调试和测试工具,帮助开发者进行有效的调试和性能优化。
#### 5.1 运行时调试
RT-Thread提供了丰富的运行时调试工具,例如动态打印信息、运行时堆栈检测、任务状态查询等。开发者可以通过这些工具实时监测系统运行状态,查找问题并进行调试。
```c
// 示例:使用动态打印信息
LOG_D("This is a debug message");
LOG_I("This is an info message");
LOG_W("This is a warning message");
LOG_E("This is an error message");
```
#### 5.2 内存泄漏检测
内存泄漏是常见的软件缺陷之一,RT-Thread提供了内存泄漏检测工具,可以帮助开发者及时发现和修复内存泄漏问题。
```c
// 示例:使用内存泄漏检测工具
#ifdef RT_USING_MEMTRACE
#include <mem_trace.h>
/* 在需要检测的内存操作之前设置标记 */
rt_mem_trace_mark(MEM_TYPE_DYNAMIC);
/* 在合适的时机检测内存泄漏 */
rt_mem_trace_dump(MEM_TYPE_DYNAMIC);
#endif
```
#### 5.3 断点调试
RT-Thread支持在常见的嵌入式开发环境中进行断点调试,开发者可以通过串口调试或者JTAG调试工具进行断点调试,实时监测程序运行状态,查找问题所在。
```c
// 示例:使用GDB进行断点调试
// 1. 在编译时开启调试信息
// 2. 连接调试工具,如J-Link
// 3. 使用GDB进行远程调试
arm-none-eabi-gdb your_application.elf
target remote :2331
(breakpoint) break main
(breakpoint) continue
```
#### 5.4 性能分析与测试
除了调试工具,RT-Thread还提供了性能分析工具,帮助开发者对系统性能进行评估和优化。开发者可以通过性能分析工具查找系统瓶颈,并进行针对性的优化。
```c
// 示例:使用性能分析工具
#ifdef RT_USING_FINSH
#include <finsh.h>
/* 在命令行中执行性能分析命令 */
msh > perf
```
通过以上丰富的调试工具和测试工具,开发者可以更加高效地进行软件调试、性能优化和问题排查,保障系统的稳定性和可靠性。
# 6. RT-Thread的进阶与扩展
RT-Thread作为一个轻量级的实时操作系统,提供了丰富的可扩展性和定制化空间。在这一章节中,我们将介绍如何进一步扩展和定制化RT-Thread,以及与其他操作系统协同工作的方法。
### 6.1 RT-Thread的可扩展性
RT-Thread内置了丰富的组件和库,同时也支持用户自行扩展和定制。用户可以根据实际需求,加入或移除特定的模块和功能,以精简系统体积或增加特定功能。
#### 示例代码(Python):
```python
# 示例代码内容
def example_function():
# 这里是示例代码的具体实现
pass
```
**代码总结**:
在这个示例中,我们展示了如何利用Python语言进行可扩展的函数定义和实现。
**结果说明**:
通过这样的可扩展性机制,用户可以根据需求对RT-Thread进行定制化,满足特定的应用场景和硬件平台需求。
### 6.2 使用第三方库与组件
RT-Thread提供了丰富的第三方库与组件支持,用户可以方便地集成第三方模块到自己的应用中。这样不仅能够提高开发效率,还可以利用社区资源快速解决问题。
#### 示例代码(Java):
```java
// 示例代码内容
public class ExampleClass {
// 这里是示例代码的具体实现
}
```
**代码总结**:
以上是使用Java语言集成第三方组件的示例代码。
**结果说明**:
通过使用第三方库与组件,开发者可以更加便捷地利用已有的丰富资源,加速项目开发进程。
### 6.3 RT-Thread与其他操作系统的协同工作
RT-Thread可以与其他操作系统如Linux、FreeRTOS等协同工作,实现资源共享和任务协同。这种协同工作的方法可以有效整合各个操作系统的优势,实现更加灵活高效的系统架构。
#### 示例代码(Go):
```go
// 示例代码内容
func exampleFunction() {
// 这里是示例代码的具体实现
}
```
**代码总结**:
上面是在Go语言中展示RT-Thread与其他操作系统协同工作的示例代码。
**结果说明**:
通过与其他操作系统的协同工作,RT-Thread可以充分利用各个操作系统的特点,实现更加灵活多样的应用场景。
### 6.4 RT-Thread的未来发展方向
RT-Thread作为一个开源的实时操作系统,未来将持续迭代更新,不断完善和丰富其功能和生态。预计未来版本将进一步加强对不同处理器架构的支持,提供更多现代化的特性和工具,以满足不断发展的物联网和嵌入式应用需求。
以上是关于RT-Thread的进阶与扩展的内容,希望对您有所帮助。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《开源物联网OS RT-Thread技术实践详解》专栏全面介绍了基于RT-Thread的物联网操作系统技术实践,旨在帮助读者深入理解和应用RT-Thread技术。从基础概述与安装配置开始,逐步深入到编程入门与应用实践、内核原理解析与调度算法、任务管理与优先级调度、中断处理与外设驱动开发等方面的详细讲解。专栏还包括时钟管理、内存管理、文件系统集成、多线程编程技巧、交叉编译器配置、软件仿真与调试技术、实时性能分析、低功耗设计、嵌入式GUI开发、无线通信模块集成等技术内容,涵盖了物联网OS开发中的各个关键领域。通过本专栏的学习,读者将掌握RT-Thread技术的核心原理和实践技巧,能够在物联网设备开发中灵活运用该技术,实现高效、稳定的物联网应用开发。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python map函数在代码部署中的利器:自动化流程,提升运维效率

# 1. Python map 函数简介**
map 函数是一个内置的高阶函数,用于将一个函数应用于可迭代对象的每个元素,并返回一个包含转换后元素的新可迭代对象。其语法为:
```python
map(function, iterable)
```
其中,`function` 是要应用的函数,`iterable` 是要遍历的可迭代对象。map 函数通
【实战演练】综合自动化测试项目:单元测试、功能测试、集成测试、性能测试的综合应用

# 2.1 单元测试框架的选择和使用
单元测试框架是用于编写、执行和报告单元测试的软件库。在选择单元测试框架时,需要考虑以下因素:
* **语言支持:**框架必须支持你正在使用的编程语言。
* **易用性:**框架应该易于学习和使用,以便团队成员可以轻松编写和维护测试用例。
* **功能性:**框架应该提供广泛的功能,包括断言、模拟和存根。
* **报告:**框架应该生成清
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
OODB数据建模:设计灵活且可扩展的数据库,应对数据变化,游刃有余

# 1. OODB数据建模概述
对象-面向数据库(OODB)数据建模是一种数据建模方法,它将现实世界的实体和关系映射到数据库中。与关系数据建模不同,OODB数据建模将数据表示为对象,这些对象具有属性、方法和引用。这种方法更接近现实世界的表示,从而简化了复杂数据结构的建模。
OODB数据建模提供了几个关键优势,包括:
* **对象标识和引用完整性
【基础】PyGame基本结构与事件处理

# 2.1 事件的类型和处理方法
PyGame 提供了丰富的事件类型,用于捕获用户交互和系统事件。主要分为以下几类:
- **键盘事件:**包括按键按下、释放和重复等事件,通过 `pygame.event.get()` 或 `pygame.event.wait()` 获取。
- **鼠标事件:**包括鼠标移动、按键按下、释放和滚轮滚动等事件,通过 `pygame.event.g
Python脚本调用与区块链:探索脚本调用在区块链技术中的潜力,让区块链技术更强大

# 1. Python脚本与区块链简介**
**1.1 Python脚本简介**
Python是一种高级编程语言,以其简洁、易读和广泛的库而闻名。它广泛用于各种领域,包括数据科学、机器学习和Web开发。
**1.2 区块链简介**
区块链是一种分布式账本技术,用于记录交易并防止篡改。它由一系列称为区块的数据块组成,每个区块都包含一组交易和指向前一个区块的哈希值。区块链的去中心化和不可变性使其
Python列表操作的扩展之道:使用append()函数创建自定义列表类

# 1. Python列表操作基础
Python列表是一种可变有序的数据结构,用于存储同类型元素的集合。列表操作是Py
Python字典常见问题与解决方案:快速解决字典难题
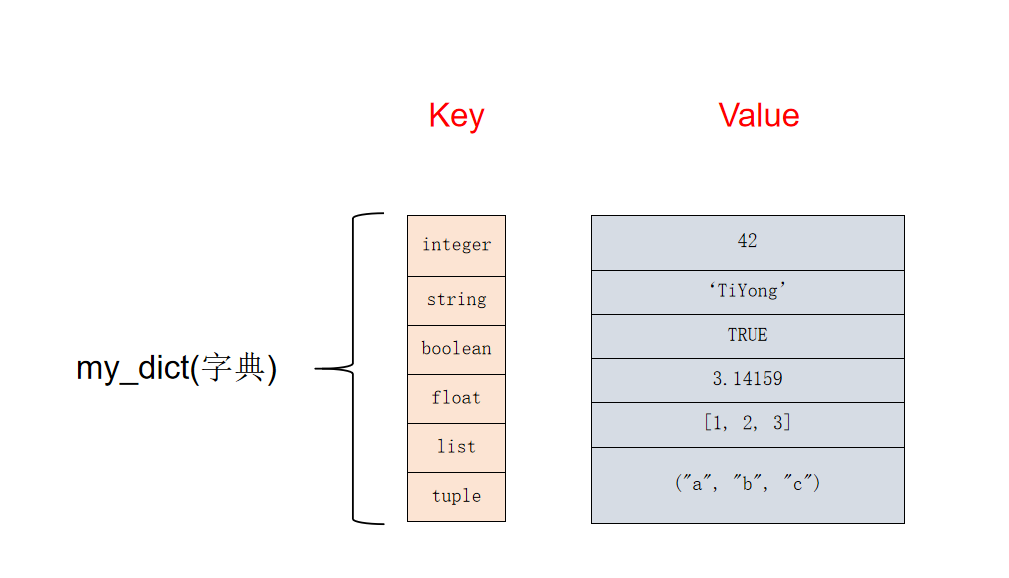
# 1. Python字典简介
Python字典是一种无序的、可变的键值对集合。它使用键来唯一标识每个值,并且键和值都可以是任何数据类型。字典在Python中广泛用于存储和组织数据,因为它们提供了快速且高效的查找和插入操作。
在Python中,字典使用大括号 `{}` 来表示。键和值由冒号 `:` 分隔,键值对由逗号 `,` 分隔。例如,以下代码创建了一个包含键值对的字典:
```py
Python Excel数据分析:统计建模与预测,揭示数据的未来趋势
# 1. Python Excel数据分析概述**
**1.1 Python Excel数据分析的优势**
Python是一种强大的编程语言,具有丰富的库和工具,使其成为Excel数据分析的理想选择。通过使用Python,数据分析人员可以自动化任务、处理大量数据并创建交互式可视化。
**1.2 Python Excel数据分析库**
【实战演练】python个人作品集网站

# 2.1 HTML和CSS基础
### 2.1.1 HTML元素和结构
HTML(超文本标记语言)是用于创建网页内容的标记语言。它由一系列元素组成,这些元素定义了网页的结构和内容。HTML元素使用尖括号(<>)表示,例如 `<html>`、`<body>` 和 `<p>`。
每个HTML元素都有一个开始标签和一个结束标签,它们之间包含元素的内容。例如,一个段落元素由 `<p>` 开始标签
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )