MATLAB仿真建模:构建和分析复杂系统,应对现实世界挑战
发布时间: 2024-06-09 18:14:12 阅读量: 107 订阅数: 46 

应用MATLAB建模与仿真
# 1. MATLAB仿真建模概述**
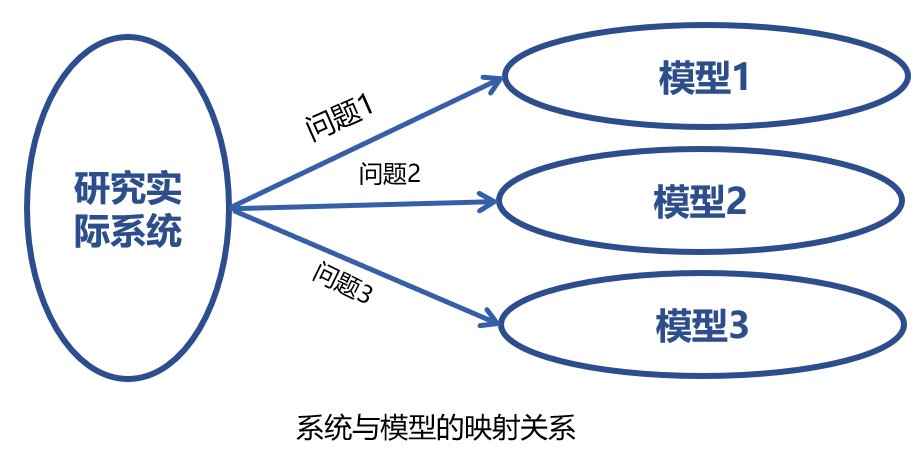
MATLAB仿真建模是一种利用MATLAB平台创建和分析仿真模型的技术,用于理解和预测复杂系统的行为。仿真模型通过数学方程和算法来表示系统,并使用计算机来模拟其行为,从而可以对系统进行虚拟实验和分析。
MATLAB仿真建模具有以下优点:
* **可视化和交互式:**Simulink仿真环境提供了一个可视化界面,允许用户轻松创建和修改仿真模型。
* **高精度:**MATLAB是一种用于科学计算的高精度语言,确保了仿真模型的准确性。
* **可扩展性:**MATLAB提供了广泛的工具和库,支持从简单到复杂的仿真模型的构建。
# 2. MATLAB仿真建模理论基础**
**2.1 仿真建模的概念和原理**
**2.1.1 仿真建模的定义和目的**
仿真建模是一种通过计算机模拟真实系统或过程的技术,以研究其行为和性能。其目的是:
* 预测系统在不同条件下的表现
* 优化系统设计和参数
* 识别和解决系统中的问题
* 探索新概念和技术
**2.1.2 仿真建模的类型和方法**
仿真建模可以分为以下类型:
* **确定性仿真:**系统行为由已知输入和参数决定,结果是可预测的。
* **随机仿真:**系统行为受随机变量影响,结果具有不确定性。
仿真建模方法包括:
* **离散事件仿真:**模拟系统中离散事件的发生和处理。
* **连续时间仿真:**模拟系统中连续变量随时间的变化。
* **混合仿真:**结合离散事件和连续时间仿真。
**2.2 MATLAB仿真建模语言和工具**
**2.2.1 MATLAB语言基础**
MATLAB是一种用于科学计算和工程建模的高级编程语言。其特点包括:
* 强大的矩阵运算能力
* 丰富的科学和工程函数库
* 交互式开发环境
**2.2.2 Simulink仿真环境**
Simulink是一个基于MATLAB的图形化仿真环境,用于构建和仿真动态系统模型。其特点包括:
* 拖放式界面,易于使用
* 丰富的模型库,涵盖各种物理和工程领域
* 强大的仿真引擎,支持并行和分布式仿真
**2.3 仿真建模的验证和验证**
**2.3.1 仿真建模的验证方法**
仿真建模的验证确保模型正确地表示了真实系统。验证方法包括:
* **面值验证:**检查模型是否符合已知系统行为。
* **结构验证:**比较模型结构与真实系统的结构。
* **行为验证:**比较模型输出与真实系统输出。
**2.3.2 仿真建模的验证标准**
仿真建模的验证标准衡量模型的准确性和可靠性。标准包括:
* **有效性:**模型是否能准确地预测系统行为。
* **可信度:**模型是否能可靠地产生可信的结果。
* **可追溯性:**模型是否能追溯到真实系统的需求和规范。
**代码块示例:**
```matlab
% 定义系统参数
mass = 10; % kg
damping = 0.1; % Ns/m
stiffness = 100; % N/m
% 创建 Simulink 模型
simulinkModel = new_system('MassDamperSystem');
% 添加组件
add_block('simulink/Sources/Step', [simulinkModel '/Step']);
add_block('simulink/Sinks/Scope', [simulinkModel '/Scope']);
add_block('simulink/Continuous/Mass', [simulinkModel '/Mass']);
add_block('simulink/Continuous/Damper', [simulinkModel '/Damper']);
add_block('simulink/Continuous/Spring', [simulinkModel '/Spring']);
% 连接组件
connect_blocks([simulinkModel '/Step'], [simulinkModel '/Mass']);
connect_blocks([simulinkModel '/Mass'], [simulinkModel '/Damper']);
connect_blocks([simulinkModel '/Damper'], [simulinkModel '/Spring']);
connect_blocks([simulinkModel '/Spring'], [simulinkModel '/Scope']);
% 设置仿真参数
set_param(simulinkModel, 'StopTime', '10');
% 运行仿真
sim(simulinkModel);
% 获取仿真结果
time = simout.time;
displacement = simout.signals.values;
% 绘制仿真结果
figure;
plot(time, displacement);
xlabel('Time (s)');
ylabel('Displacement (m)');
title('Mass-Damper-Spring System Simulation');
```
**代

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**MATLAB 中文专栏**
欢迎来到 MATLAB 中文专栏,一个全面的学习平台,旨在帮助您从零基础到实战应用,快速掌握 MATLAB 编程。本专栏涵盖了 MATLAB 的各个方面,包括数据类型、变量操作、数据可视化、数据清洗、统计分析、矩阵运算、微积分计算、数值优化、函数与脚本、流程控制、面向对象编程、图像处理、机器学习、并行计算和仿真建模。
通过深入浅出的文章和丰富的示例,您将深入理解 MATLAB 的核心概念和实际应用。无论您是初学者还是经验丰富的用户,本专栏都将为您提供宝贵的知识和技巧,帮助您高效处理数据、解决复杂问题并创建强大的应用程序。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【CATIA V5复合材料设计终极指南】:从入门到专业设计的全攻略
# 摘要
CATIA V5作为一种先进的三维设计软件,在复合材料设计领域中扮演着重要角色。本文详细介绍了CATIA V5在复合材料设计中的应用,从基础知识、设计工具与环境、建模与分析到仿真与测试等方面进行了全面的探讨。通过对复合材料的分类、特性分析以及设计流程优化技巧的阐述,本文旨在提供给读者一个关于如何有效利用CATIA V5进行复合材料设计的实践指南。本文还通过案例研究,展示了复合材料在不同行业,如航空航天和汽车制造中的实际应用,并讨论了仿真技术在产品开发中的重要作用。关键字
# 关键字
复合材料设计;CATIA V5;机械性能分析;设计流程优化;结构分析与优化;仿真模拟
参考资源链接:
技术债务不再是问题:中控BS架构考勤系统的代码健康维护策略

# 摘要
本文全面探讨了中控BS架构考勤系统的设计、维护策略和性能优化。文章首先概述了中控BS架构的定义、优势以及技术债务的形成与影响,强调了代码健康维护的重要性。随后,深入讨论了代码健康维护的理论框架,包括策略设计原则、设计模式与重构方法,以及自动化测试和持续集成的实施。接着,通过实际案例分析,探讨了代码重构实践、测试驱动开发(TDD)的实施和持续部署(CD)与代码质量保证的策
程序员认证考点:字符串处理函数的编写技巧
# 摘要
字符串处理作为编程中不可或缺的技能,对软件开发的各个方面都有深远影响。本文从字符串处理的基本理论讲起,详细介绍了字符串创建与销毁、查找与替换、分割与连接等基础操作,强调了正确内存管理的重要性。进一步,本文探讨了使用正则表达式、处理Unicode及多字节字符集,以及字符串的国际化和本地化等高级技术。性能优化部分着重于算法选择、内存管理和编译器优化,以提高字符串处理的效率
光传输安全新防线:保护ODU flex-G.7044免受网络攻击
# 摘要
随着光传输技术的不断发展,网络安全问题日益突出,ODU flex-G.7044作为一种先进的传输技术,其安全性和可靠性成为关注焦点。本文首先介绍了光传输与网络安全的基础知识,然后深入探讨ODU flex-G.7044技术的工作原理及其技术优势和应用场景。第三章分析了针对ODU flex-G.7044的网络攻击手段及其带来的风险,接着在第四章提出
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
无线定位算法安全防护指南:防范定位数据泄露的有效措施

# 摘要
无线定位技术在提供便捷服务的同时,也带来了严重的安全风险,尤其是定位数据的泄露问题。本文首先概述了无线定位技术及其潜在的安全风险,然后深入分析了定位数据泄露的途径与影响,包括信号截获、网络攻击
【跨领域视角】:探索S参数转换表在各行各业的应用
# 摘要
S参数转换表是现代电信、计算机科学及制造业中不可或缺的技术工具。本文首先介绍了S参数转换表的基础概念及其在射频系统中的作用,并详述了它在信号完整性分析、材料测试、机械设计和质量控制中的广泛应用。然后,探讨了S参数转换表在计算机科学领域中的应用,包括高速网络通信、计算机硬件设计和软件开发。最后,本文展望了S参数转换表在新
【TongWeb7事务管理与数据一致性】:业务数据安全的保障

# 摘要
TongWeb7事务管理是确保企业级应用数据一致性和完整性的关键组成部分。本文首先介绍了事务管理的基础理论,包括事务的ACID属性、数据一致性的理论支持和隔离级别的分类。接着,探讨了TongWeb7在事务管理实践方面的高级特性和性能优化策略,如嵌套和分布式事务、事务日志及恢复机制。文章还深入分析了数据一致性在TongWeb7中的实现细节,包括锁机制、死锁预防和事务日志的管理。最后,针对业务数据安全进阶话题,本文讨论
【优化案例研究】:从问题到解决方案,PID控制系统的升级之旅
# 摘要
本文对PID控制系统进行了全面概述,深入解析了PID控制理论,包括控制器原理、数学模型构建以及参数意义。文章还探讨了PID控制器参数调节的经典方法、优化技术及自动调整策略。针对控制系统中常见的超调、稳定性问题以及噪声干扰,本文提供了理论分析和改进方法。对于非线性和复
【老旧系统升级】:如何为传统Delphi系统添加现代进度反馈
# 摘要
随着信息技术的快速发展,老旧系统的升级已成为维持企业竞争力的关键步骤。本文探讨了老旧Delphi系统升级的需求与挑战,回顾了Delphi的基础知识,强调了现代进度反馈机制的重要性,并提供了现代化改造的实践案例。文章详细讨论了老旧Delphi系统功能重构、进度反馈机制的集成,以及系统测试与优化的方法。最后
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )