MSP430实时操作系统应用:提高系统响应速度,增强可靠性,让你的单片机更稳定
发布时间: 2024-07-07 10:33:07 阅读量: 49 订阅数: 35 

基于MSP430单片机的实时多任务操作系统
# 1. MSP430实时操作系统概述**
实时操作系统(RTOS)是一种专为嵌入式系统设计的操作系统,可提供可预测的执行和低延迟响应。MSP430 RTOS是针对TI MSP430微控制器系列优化的RTOS,它提供了任务管理、优先级调度、同步机制和通信功能。
MSP430 RTOS的优点包括:
* **实时性:**可保证关键任务在指定的时间内执行,从而满足嵌入式系统的实时要求。
* **低资源消耗:**占用极少的内存和处理资源,使其适用于资源受限的嵌入式系统。
* **可移植性:**可在不同的MSP430微控制器上使用,简化了系统开发和维护。
# 2. MSP430实时操作系统编程技巧
### 2.1 实时操作系统基本概念
#### 2.1.1 任务管理
**任务**是实时操作系统中执行的独立执行单元。每个任务都有自己的代码、数据和堆栈。任务管理包括创建、终止、挂起和恢复任务。
**创建任务**时,需要指定任务的名称、优先级、堆栈大小和入口函数。优先级决定了任务的执行顺序,优先级高的任务优先执行。
**终止任务**时,需要释放任务占用的资源,包括堆栈和数据。
**挂起任务**时,任务暂时停止执行,但仍保留其状态。挂起任务可以释放资源,以便其他任务执行。
**恢复任务**时,挂起的任务重新开始执行。
#### 2.1.2 优先级调度
**优先级调度**是一种调度算法,它根据任务的优先级决定任务的执行顺序。优先级高的任务优先执行,优先级低的任务等待。
**轮询调度**是一种简单的优先级调度算法,它轮流执行所有就绪任务。
**时间片调度**是一种更复杂的优先级调度算法,它为每个任务分配一个时间片。当一个任务的时间片用完时,它被挂起,而优先级更高的任务开始执行。
### 2.2 MSP430实时操作系统API
MSP430实时操作系统提供了一系列API函数,用于管理任务、信号量和互斥量。
#### 2.2.1 任务创建和管理
| 函数 | 描述 | 参数 | 返回值 |
|---|---|---|---|
| `task_create()` | 创建一个任务 | 任务名称、优先级、堆栈大小、入口函数 | 任务句柄 |
| `task_terminate()` | 终止一个任务 | 任务句柄 | 无 |
| `task_suspend()` | 挂起一个任务 | 任务句柄 | 无 |
| `task_resume()` | 恢复一个任务 | 任务句柄 | 无 |
#### 2.2.2 信号量和互斥量
**信号量**是一种同步机制,用于控制对共享资源的访问。信号量有一个计数器,表示资源的可用性。
**互斥量**是一种特殊的信号量,它只能取值0或1。互斥量用于保护临界区,确保一次只有一个任务可以访问临界区。
| 函数 | 描述 | 参数 | 返回值 |
|---|---|---|---|
| `semaphore_create()` | 创建一个信号量 | 信号量名称、初始计数 | 信号量句柄 |
| `semaphore_wait()` | 等待一个信号量 | 信号量句柄 | 无 |
| `semaphore_signal()` | 信号一个信号量 | 信号量句柄 | 无 |
| `mutex_create()` | 创建一个互斥量 | 互斥量名称 | 互斥量句柄 |
| `mutex_lock()` | 锁定一个互斥量 | 互斥量句柄 | 无 |
| `mutex_unlock()` | 解锁一个互斥量 | 互斥量句柄 | 无 |

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 MSP430 单片机程序设计专栏!本专栏旨在为初学者和经验丰富的开发人员提供全面的 MSP430 知识和技能。从入门指南到高级技术,我们涵盖了所有内容,包括:
* MSP430 架构和 I/O 编程
* 定时器、中断和存储器管理
* 功率优化和外围设备集成
* 无线通信、传感器应用和数据处理
* 图形显示、电机控制和电源管理
* 故障诊断和修复
通过深入浅出的讲解、丰富的示例和实用的技巧,本专栏将帮助您快速掌握 MSP430 的精髓,并将其应用于您的项目中。无论您是刚开始接触 MSP430 还是希望提升您的技能,本专栏都是您不可或缺的资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
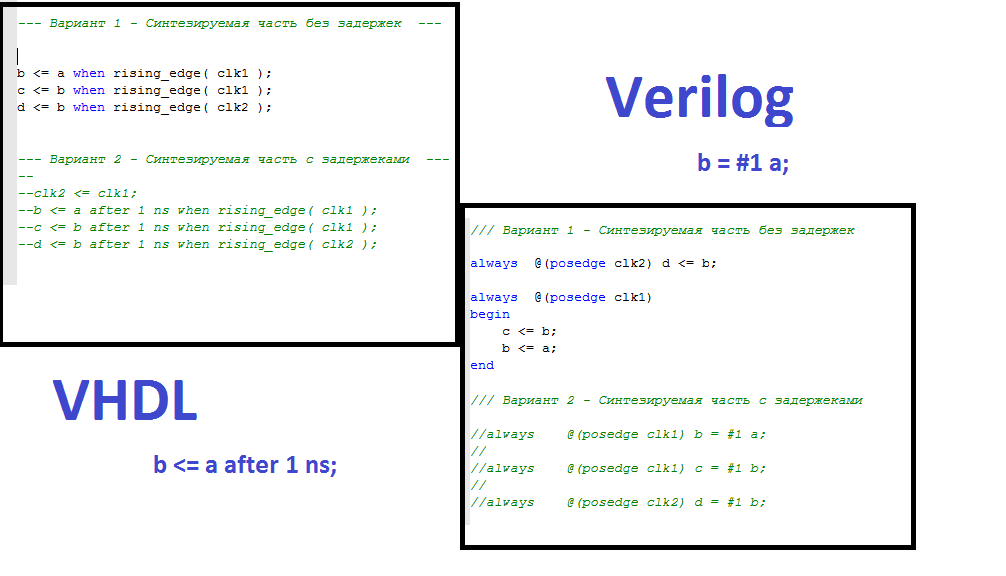
【从零开始学Verilog】:如何在Cadence中成功搭建第一个项目
# 摘要
本文旨在提供一个全面的Verilog语言和Cadence工具使用指南,涵盖了从基础入门到项目综合与仿真的深入应用。第一章介绍了Verilog语言的基础知识,包括基本语法和结构。第二章则深入讲解了Cadence工具的使用技巧,包括界面操作、项目管理和设计库应用。第三章专注于在Cadence环境中构建和维护Verilog项目,着重讲述了代码编写、组织和集成。第四章探讨
微服务架构精要:实现高质量设计与最佳实践
# 摘要
微服务架构作为一种现代化的软件开发范式,以其模块化、灵活性和可扩展性优势正逐渐成为企业级应用开发的首选。本文从基本概念入手,深入探讨了微服务的设计原则与模式、持续集成和部署策略、以及安全、测试与优化方法。通过对微服务架构模式的详细介绍,如API网关、断路器、CQRS等,文章强调了微服务通信机制的重要性。同时,本文还分析了微服务在持续集成和自动化部署中的实践,包括容器化技术的应用和监控、日志管理。此
【快速定位HMI通信故障】:自由口协议故障排查手册

# 摘要
自由口协议作为工业通信中的关键组件,其基础、故障定位及优化对于保证系统的稳定运行至关重要。本文首先介绍了自由口协议的基本原理、标准与参数配置以及数据包结构,为理解其工作机制奠定基础。接着,详细阐述了自由口协议故障排查技术,包括常见故障类型、诊断工具与方法及解
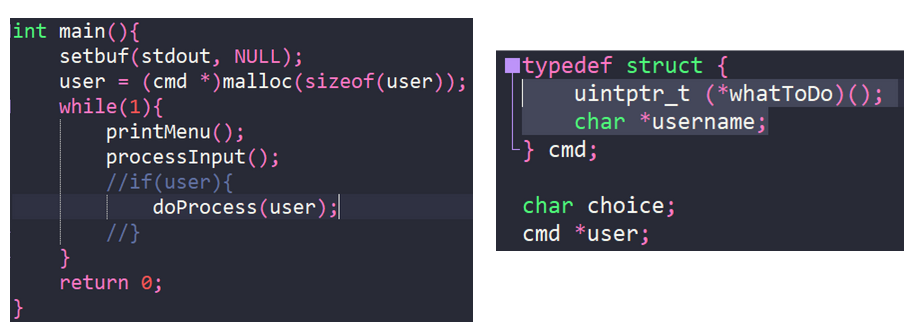
C语言内存管理速成课:避开动态内存分配的坑
# 摘要
C语言作为经典的编程语言,其内存管理机制对程序的性能和稳定性具有决定性影响。本文首先概述了C语言内存管理的基础知识,随后深入探讨了动态内存分配的原理、使用技巧及常见错误。通过案例分析,本文进一步实践了内存管理在实际项目中的应用,并讨论了内存分配的安全性和优化策略。本文还涵盖了高级内存管理技术,并展望了内存管理技术的发展趋势和新兴技术的应用前景。通
【招投标方案书的语言艺术】:让技术文档更具说服力的技巧

# 摘要
本文探讨了招投标方案书撰写过程中的语言艺术及结构设计。重点分析了技术细节的语言表达技巧,包括技术规格的准确描述、方案的逻辑性和条理性构建、以及提升语言说服力的方法。接着,文章详细介绍了招投标方案书的结构设计,强调了标准结构和突出技术展示的重要性,以及结尾部分总结与承诺的撰写技巧。此外,本文还提供了写作实践的案例分析和写作技巧的演练,强调了与甲方沟通与互动的重要性,包括沟通技巧、语言策略和后续跟进调整。最后
【效能对比】:TAN时间明晰网络与传统网络的差异,新一代网络技术的效能评估
.jpg)
# 摘要
时间明晰网络作为新型网络架构,提供了比传统网络更精准的时间同步和更高的服务质量(QoS)。本文首先概述了时间明晰网络的基本概念、运作机制及其与传统网络的对比优势。接着,文章深入探讨了实现时间明晰网络的关键技术,包括精确时间协议(PTP)、网络时间协议(NTP)和时间敏感网络(TSN)技术等。通过对工业自动化
【UDS错误代码秘密解读】:专家级分析与故障排查技巧

# 摘要
统一诊断服务(UDS)协议是汽车行业中用于诊断和通信的国际标准,其错误代码机制对于检测和解决车载系统问题至关重要。本文首先概述了UDS协议的基础知识,包括其架构和消
【RTX 2080 Ti性能调优技巧】:硬件潜力全挖掘
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/8/v/dscSt1S7GuYFTJNrIH0g/2017-03-01-limpa-2.png)
# 摘要
本文全面概述了RTX 2080 Ti显卡的架构特点及其性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )