【卷积神经网络(CNN)在图像分割中的应用】:PyTorch深度解析
发布时间: 2024-12-12 05:42:56 阅读量: 13 订阅数: 7 

CNN.rar_CNN_CNN神经网络_卷积神经网络
# 1. 卷积神经网络(CNN)与图像分割概述
随着深度学习的兴起,卷积神经网络(CNN)已经成为图像处理领域的核心技术之一。CNN特别擅长于识别和处理具有空间层级结构的数据,如图像。图像分割作为一种将图像细分为多个部分或对象的技术,其应用广泛,从医学影像分析到自动驾驶汽车中的场景理解,都有其身影。本章我们将先从CNN的基本概念开始,然后探讨图像分割在实际应用中的重要性和挑战,并为后续章节中对CNN深入理论、设计原则、训练过程和图像分割技术的详细讨论奠定基础。
## 1.1 CNN的基本概念
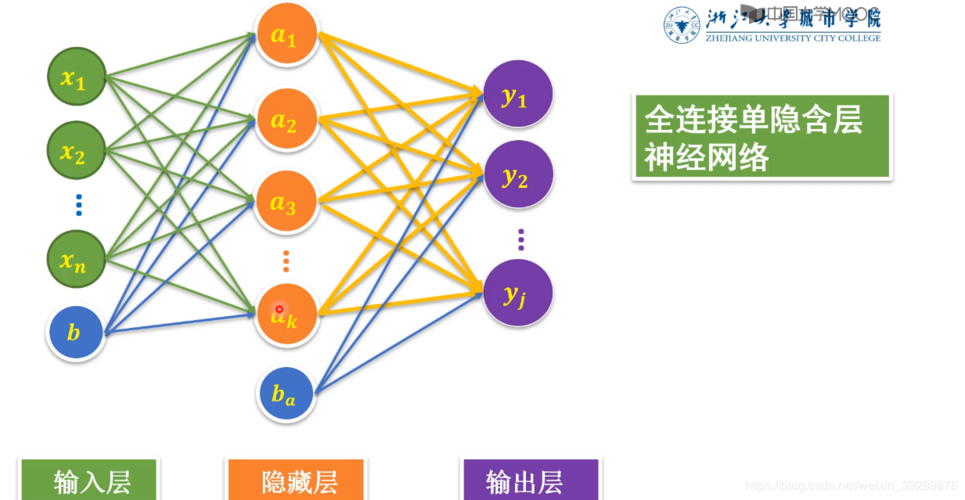
CNN是一种受生物视觉处理系统启发的深度学习模型,它能够自动和有效地从图像中提取特征。其工作流程大致包括卷积层、池化层、全连接层等核心组件。这些组件通过学习图像数据中的复杂模式和特征,使得CNN在图像分类、目标检测以及图像分割任务中表现出色。
## 1.2 图像分割的目的与应用场景
图像分割的目标是将图像划分为多个具有特定含义的区域或对象。这一技术广泛应用于医疗图像分析、卫星图像解析、自动驾驶的环境感知等。准确的图像分割可以辅助识别和测量图像中的关键特征,从而对特定任务进行更深入的理解和分析。
## 1.3 图像分割的技术演进
从早期的阈值分割、区域生长,到基于边缘的方法,再到现在的深度学习方法,图像分割技术不断演进。深度学习尤其是CNN的引入,使得图像分割的准确性和鲁棒性得到了显著的提升。全卷积网络(FCN)和U-Net架构等已经成为图像分割领域的关键技术和工具。
# 2. 卷积神经网络基础理论
### 2.1 卷积神经网络的组成与工作原理
卷积神经网络(CNN)是深度学习中用于处理具有网格结构的数据(例如图像)的一类高效算法。其独特之处在于能够通过局部感受野、权重共享和池化操作来提取数据的空间层次特征。
#### 2.1.1 卷积层、池化层与全连接层
CNN 的基础结构包括卷积层、池化层和全连接层。卷积层主要负责特征提取,每个卷积核通过在输入数据上滑动进行卷积操作。池化层通过减少参数数量来降低模型复杂度并控制过拟合,常见的池化操作有最大池化和平均池化。全连接层则是标准的神经网络层,通常在 CNN 的末端用于将特征映射到最终的输出。
下面展示一个简单的卷积层计算示例:
```python
import torch
import torch.nn as nn
# 定义一个简单的卷积层
class SimpleConvLayer(nn.Module):
def __init__(self):
super(SimpleConvLayer, self).__init__()
self.conv = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3, padding=1)
def forward(self, x):
x = self.conv(x)
return x
# 创建模型并应用一个输入
model = SimpleConvLayer()
input_tensor = torch.rand(1, 1, 32, 32) # (batch_size, channels, height, width)
output = model(input_tensor)
```
在该示例中,我们创建了一个包含单个卷积核的卷积层。参数 `in_channels` 和 `out_channels` 分别表示输入和输出的通道数,`kernel_size` 是卷积核的大小,`padding` 用于控制输出特征图的大小。通过这种方式,CNN 能够有效地识别图像中的局部特征。
#### 2.1.2 激活函数与批量归一化
激活函数为网络提供了非线性能力,使得网络能够学习复杂的模式。ReLU(Rectified Linear Unit)是最常用的激活函数之一。批量归一化(Batch Normalization)则用于加速网络训练,防止过拟合,并允许使用较高的学习率。
下面是一个使用 ReLU 激活函数和批量归一化的网络结构示例:
```python
class ConvBNReLUModel(nn.Module):
def __init__(self):
super(ConvBNReLUModel, self).__init__()
self.conv = nn.Conv2d(in_channels=1, out_channels=16, kernel_size=3, padding=1)
self.bn = nn.BatchNorm2d(16)
self.relu = nn.ReLU()
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
```
在此结构中,卷积层后面紧跟批量归一化层和 ReLU 激活函数,使得模型能够处理更复杂的数据关系。
### 2.2 卷积神经网络的设计原则
#### 2.2.1 网络深度与宽度的影响
网络的深度和宽度是设计 CNN 时需要考虑的两个重要因素。深度(层数)决定了网络可以提取的特征复杂度,宽度(每层的卷积核数量)影响网络的容量。网络深度的增加可以让模型捕获更高层次的特征,但也可能增加过拟合的风险。
#### 2.2.2 权重初始化与正则化技术
权重初始化和正则化技术是防止深度神经网络训练失败的重要方法。权重初始化方法如 Xavier 初始化和 He 初始化有助于控制信号在网络中的流动。正则化技术,包括 L1 和 L2 正则化、Dropout 等,有助于减少过拟合。
### 2.3 卷积神经网络的训练过程
#### 2.3.1 损失函数的选择与优化器配置
损失函数衡量了模型的预测值与真实值之间的差异。CNN 中常用的损失函数包括交叉熵损失函数和均方误差损失函数。优化器,例如 SGD、Adam 和 RMSprop,用于更新网络权重以最小化损失函数。
#### 2.3.2 过拟合与欠拟合的诊断与对策
过拟合和欠拟合是训练神经网络时常常遇到的两个问题。可以通过调整网络结构、使用正则化技术、增加训练数据或使用数据增强等方法来解决这些问题。
在下一章节中,我们将深入探讨图像分割的理论与技术,了解它是如何将图像分解为多个有意义的区域或对象,并介绍图像分割的评价指标。
# 3. 图像分割的理论与技术
## 3.1 图像分割的概念与任务
### 3.1.1 图像分割的目标与应用场景
图像分割作为计算机视觉和图像处理的核心任务,旨在将图像划分为多个有意义的部分或区域,这些部分通常对应于不同场景的物体或区域。在医学成像、自动驾驶、卫星图像分析等众多应用领域中,图像分割是实现进一步分析和决策的前提和基础。
例如,在医学领域,图像分割可以帮助医生识别并分析器官结构,从而辅助诊断疾病。在自动驾驶中,分割算法能够识别道路、行人、车辆等,以确保自动驾驶系统的正确反应。此外,在遥感图像分析中,分割被用于监测农作物生长情况、森林覆盖度、城市扩张等应用。
### 3.1.2 图像分割的评价指标
评价图像分割效果的指标是衡量算法性能的重要手段。常见的评价指标包括:
- **像素精度(Pixel Accuracy)**: 表示所有像素中正确分类的像素所占的比率。
- **交并比(Intersection over Union, IoU)**: 表示预测的分割区域与真实区域的交集和并集之比,也称为Jaccard指数。
- **Dice系数**: 与IoU类似,但它取值范围在0到1之间,计算方法为\(2 \times (交集) / (分割区域A的像素数 + 分割区域B的像素数)\)。
- **平均轮廓距离(Average Contour Distance)**: 测量分割轮廓与真实轮廓之间的平均距离,用于评估分割区域的形状相似度。
这些指标从不同角度评价了图像分割的性能,其中IoU和Dice系数对分割区域的定位准确度尤为敏感,因此在检测任务中特别受到青睐。
## 3.2 图像分割的方法分类
### 3.2.1 阈值分割与区域分割
- **阈值分割**是一种基于像素灰度值的分割方法,通过设置一个或多个阈值来区分前景和背景。例如,灰度阈值分割根据像素的亮度将图像分为不同的区域,适用于图像对比度较高的情况。
```python
import cv2
# 读取图像
image = cv2.imread('path_to_image')
# 将图像转换为灰度图
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 设置阈值并应用
_, binary_image = cv2.threshold(gray_image, 127, 255, cv2.THRESH_BINARY)
cv2.imshow('Thresholded Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
- **区域分割**则是基于区域生长的方法,它根据像素的相似性原则将图像分割为多个区域。例如,区域生长算法从种子点出发,根据像素间的相似性合并邻近像素。
### 3.2.2 边缘检测与基于模型的分割
- **边缘检测**通过寻找图像中像素强度变化最显著的点来实现分割。经典的边缘检测算子如Sobel算子、Canny边缘检测器等在图像处理中得到了广泛应用。
```python
# 使用Canny边缘检测器进行边缘检测
edges = cv2.Canny(gray_image, 100, 200)
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
- **基于模型的分割**方法使用数学模型来描述图像的统计特性,并通过优化方法来找到最佳的分割结果。例如,基于图论的方法将图像分割问题转化为图的最小割问题,通过求解可以得到最优的分割方案。
## 3.3 图像分割中的深度学习方法
### 3.3.1 全卷积网络(FCN)与U-Net架构
- **全卷积网络(FCN)**是深度学习在图像分割中的一种基础结构,它通过去除传统卷积神经网络中的全连接层,实现对任意尺寸图像的像素级预测。FCN将卷积层的输出尺寸调整到与输入图像相同,并进行上采样(反卷积)以恢复空间分辨率。
- **U-Net**是在医学图像分割中广泛应用的网络结构,它具有对称的U型设计,由一个收缩路径(用于捕获上下文)和一个对称的扩展路径(用于精确定位)组成。U-Net特别适合于图像分割数据有限的情况。
```python
import torch
import torch.nn as nn
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
# 构建U-Net网络结构
def forward(self, x):
# 定义前向传播过程
# 实例化
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 PyTorch 中图像分割的各个方面,提供了一系列从初学者到高级用户的全面指南。从理论基础到实际应用,专栏涵盖了图像分割的各个阶段,包括:
* 高级技术应用和性能优化策略,以提升模型效率和准确性。
* 从数据预处理到模型训练的详细案例分析,展示了图像分割在实际场景中的应用。
* 利用卷积神经网络 (CNN) 进行图像分割的深入解析,阐明了 CNN 在该领域的强大功能。
* 掌握图像分割关键步骤的数据预处理指南,为模型性能打下坚实基础。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ROST软件数据可视化技巧:让你的分析结果更加直观动人
:max_bytes(150000):strip_icc()/ScreenShot2019-10-28at1.25.36PM-ab811841a30d4ee5abb2ff63fd001a3b.jpg)
参考资源链接:[ROST内容挖掘系统V6用户手册:功能详解与操作指南](https://wenku.csdn.net/doc/5c20fd2fpo?spm=1055.2635.3001.10343)
RTCM 3.3协议深度剖析:如何构建秒级精准定位系统
参考资源链接:[RTCM 3.3协议详解:全球卫星导航系统差分服务最新标准](https://wenku.csdn.net/doc/7mrszjnfag?spm=1055.2635.3001.10343)
# 1. RTCM 3.3协议简介及其在精准定位中的作用
RTCM (Radio Technical Co
提升航空数据传输效率:AFDX网络数据流管理技巧
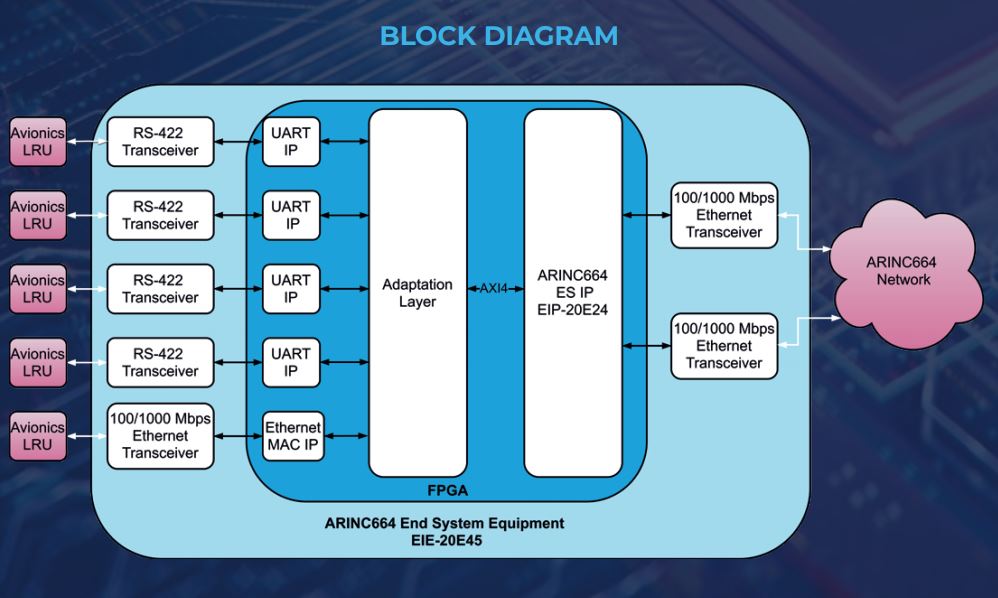
参考资源链接:[AFDX协议/ARINC664中文详解:飞机数据网络](https://wenku.csdn.net/doc/66azonqm6a?spm=1055.2635.3001.10343)
# 1. AFDX网络技术概述
## 1.1 AFDX网络技术的起源与应用背景
AFDX (Avionics Full-Duplex Switched Ethernet) 网络技术,是专为航空电子通信设计
软件开发者必读:与MIPI CSI-2对话的驱动开发策略
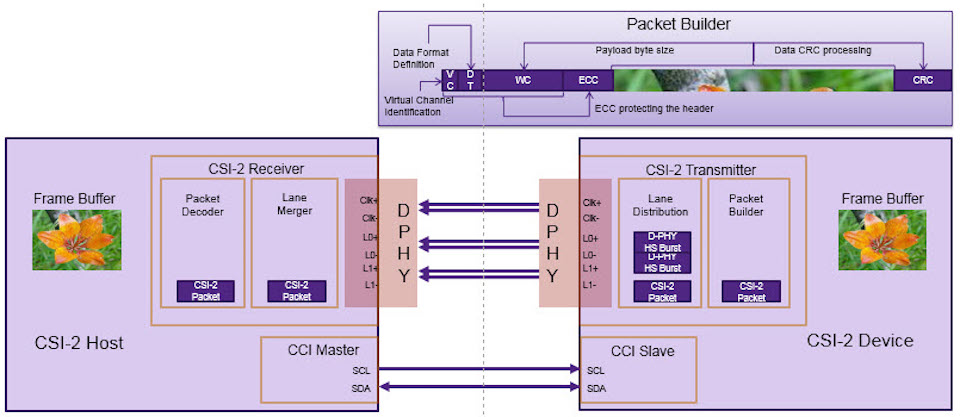
参考资源链接:[mipi-CSI-2-标准规格书.pdf](https://wenku.csdn.net/doc/64701608d12cbe7ec3f6856a?spm=1055.2635.3001.10343)
# 1. MIPI CSI-2协议概述
在当今数字化和移动化的世界里,移动设备图像性能的提升是用户体验的关键部分。为
【PCIe接口新革命】:5.40a版本数据手册揭秘,加速硬件兼容性分析与系统集成
参考资源链接:[2019 Synopsys PCIe Endpoint Databook v5.40a:设计指南与版权须知](https://wenku.csdn.net/doc/3rfmuard3w?spm=1055.2635.3001.10343)
# 1. PCIe接口技术概述
PCIe( Peripheral Component Interconnect Express)是一种高速串行计算机扩展总线标准,被广泛应用于计算机内部连接高速组件。它以点对点连接的方式,能够提供比传统PCI(Peripheral Component Interconnect)总线更高的数据传输率。PCIe的进
ZMODEM协议的高级特性:流控制与错误校正机制的精妙之处

参考资源链接:[ZMODEM传输协议深度解析](https://wenku.csdn.net/doc/647162cdd12cbe7ec3ff9be7?spm=1055.2635.3001.10343)
# 1. ZMODEM协议简介
## 1.1 什么是ZMODEM协议
ZMODEM是一种在串行通信中广泛使用的文件传输协议,它支持二进制数据传输,并可以对数据进行分块处理,确保文件完整无误地传输到目标系统。与早期的XMODEM和YMODEM协
IS903优盘通信协议揭秘:USB通信流程的全面解读

参考资源链接:[银灿IS903优盘完整的原理图](https://wenku.csdn.net/doc/6412b558be7fbd1778d42d25?spm=1055.2635.3001.10343)
# 1. USB通信协议概述
USB(通用串行总线)通信协议自从1996年首次推出以来,已经成为个人计算机和其他电子设备中最普遍的接口技术之一。该章节将概述USB通信协议的基础知识,为后续章节深入探讨USB的硬件结构、信号传输和通信流程等主题打
【功能拓展】创维E900 4K机顶盒应用管理:轻松安装与管理指南
参考资源链接:[创维E900 4K机顶盒快速配置指南](https://wenku.csdn.net/doc/645ee5ad543f844488898b04?spm=1055.2635.3001.10343)
# 1. 创维E900 4K机顶盒概述
在本章中,我们将揭开创维E900 4K机顶盒的神秘面纱,带领读者了解这一强大的多媒体设备的基本信息。我们将从其设计理念讲起,探索它如何为家庭娱乐带来高清画质和智能功能。本章节将为读者提供一个全面的概览,包括硬件配置、操作系统以及它在市场中的定位,为后续章节中关于设置、应用使用和维护等更深入的讨论打下坚实的基础。
创维E900 4K机顶盒采用先
【cx_Oracle数据库管理】:全面覆盖连接、事务、性能与安全性

参考资源链接:[cx_Oracle使用手册](https://wenku.csdn.net/doc/6476de87543f84448808af0d?spm=1055.2635.3001.10343)
# 1. cx_Oracle数据库基础介绍
cx_Oracle 是一个
【深度学习的交通预测力量】:构建上海轨道交通2030的智能预测模型

参考资源链接:[上海轨道交通规划图2030版-高清](https://wenku.csdn.net/doc/647ff0fc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )