SPI通信协议:时序图解析与实际应用
发布时间: 2024-02-21 11:32:10 阅读量: 300 订阅数: 57 
# 1. SPI通信协议简介
## 1.1 SPI通信协议概述
SPI(Serial Peripheral Interface)是一种串行外设接口,它允许主设备与多个从设备进行全双工通信。SPI通信协议在嵌入式系统、传感器和外设控制等领域广泛应用。
SPI通信协议的特点包括高速传输、简单硬件连接、灵活的通信方式等。通常由一个主设备(Master)和一个或多个从设备(Slave)组成。主设备负责产生时钟信号和控制数据传输,从设备被动接受主设备的控制进行数据交换。
## 1.2 SPI通信协议基本原理
SPI通信协议基于四根信号线:时钟线(SCLK)、输入线(MISO)、输出线(MOSI)、片选线(SS)。主设备通过时钟线产生时钟脉冲,控制数据的传输;输出线由主设备输出数据到从设备;输入线则由从设备输出数据到主设备;片选线用于选择要进行通信的从设备。
SPI的数据传输方式可以是全双工或半双工,数据的传输速度可以通过时钟频率进行调节,根据硬件支持不同,通常速度范围从几十Kbps到几百Mbps。
## 1.3 SPI通信协议与其他通信协议的比较
与其他通信协议(如I2C、UART)相比,SPI通信协议具有高速传输、数据传输简单、适用于短距离通信等优点。然而,SPI通信线数量较多、线路布局要求较高,通常用于对速度和灵活性要求较高的应用场景。
# 2. SPI通信协议的时序图解析
SPI通信协议是一种全双工、同步的通信协议,通过时钟信号和数据线实现主从设备之间的数据传输。在本章节中,将详细解析SPI通信的时序图及通信流程,包括主从设备的通信流程分析以及时钟极性和相位对通信的影响。
### 2.1 SPI通信时序图详解
SPI通信时序图是理解SPI通信协议工作原理的关键。通常,SPI通信包含四根线:时钟线(SCK)、主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)、片选线(SS)。时序图展示了这些信号线上的数据传输时序,包括数据的发送与接收时机及时钟信号的作用。
```python
# SPI通信时序图示例代码(Python实现)
import spidev
import time
# 创建SPI对象
spi = spidev.SpiDev()
spi.open(0, 0) # 打开SPI设备0,片选信号为0
# 设置通信速率和模式
spi.max_speed_hz = 5000 # 5000Hz
spi.mode = 0 # 时钟极性为0,时钟相位为0
# 从设备向主设备发送数据
send_data = [0x01, 0x02, 0x03]
recv_data = spi.xfer(send_data)
print("接收到的数据:", recv_data)
spi.close() # 关闭SPI设备
```
**代码总结:** 以上代码演示了通过Python的spidev库进行SPI通信的基本步骤,包括初始化SPI对象、设置通信速率和模式、发送数据并接收返回数据。通过时序图和代码的结合,可以更清晰地理解SPI通信的时序关系。
### 2.2 主从设备的通信流程分析
在SPI通信中,主设备负责控制通信的发起和时序同步,从设备则根据主设备的信号进行数据传输。通信流程主要包括片选信号的选中、数据的发送与接收等步骤。
```java
// 主从设备通信流程示例代码(Java实现)
// 主设备发送数据到从设备
public void sendDataToSlave(SerialPort port, byte[] data) {
port.selectSlave(); // 选择从设备
port.sendData(data); // 发送数据
byte[] recvData = port.receiveData(); // 接收数据
port.deselectSlave(); // 取消选择从设备
}
```
**代码总结:** 上述Java代码展示了主从设备在SPI通信中的通信流程,包括选择从设备、发送数据、接收数据以及取消从设备选择的过程。主从设备之间的通信流程需依照SPI协议规定的时序来进行,确保数据的正确传输和接收。
### 2.3 时钟极性和相位的影响
SPI通信中的时钟极性(CPOL)和相位(CPHA)对数据的传输方式有重要影响。不同的CPOL和CPHA设置会导致数据采样的时机不同,因而需要主从设备保持一致的配置才能正常通信。
```go
// 时钟极性和相位设置示例代码(Go语言实现)
func main()
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
这个专栏将深入探讨SPI通信协议,从概念到实际应用,逐步展开全面的解析。首先介绍了SPI通信协议的基本原理和概念,接着详细分析了Master和Slave设备的工作原理以及数据传输方式与时序分析。专栏还对主从模式与多从模式的区别进行了深入剖析,同时探讨了数据传输大小的限制及相应解决方案,以及如何实现多主设备的通信和处理传输中的数据冲突。此外,专栏还涵盖了SPI通信协议在不同领域的应用,如在传感器接口、存储设备读写以及嵌入式系统中的调试与优化。最后,通过时序图解析与实际应用,以及与其他通信协议的对比与选择,来全面展示SPI通信协议的特点和优势。通过对SPI通信协议的全面介绍和深入解析,读者将能够全面了解SPI通信协议的工作原理和应用场景,为相关领域的工程师和开发人员提供有力的理论支持和实践指导。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
STEP7 GSD文件安装:兼容性分析,确保不同操作系统下的正确安装
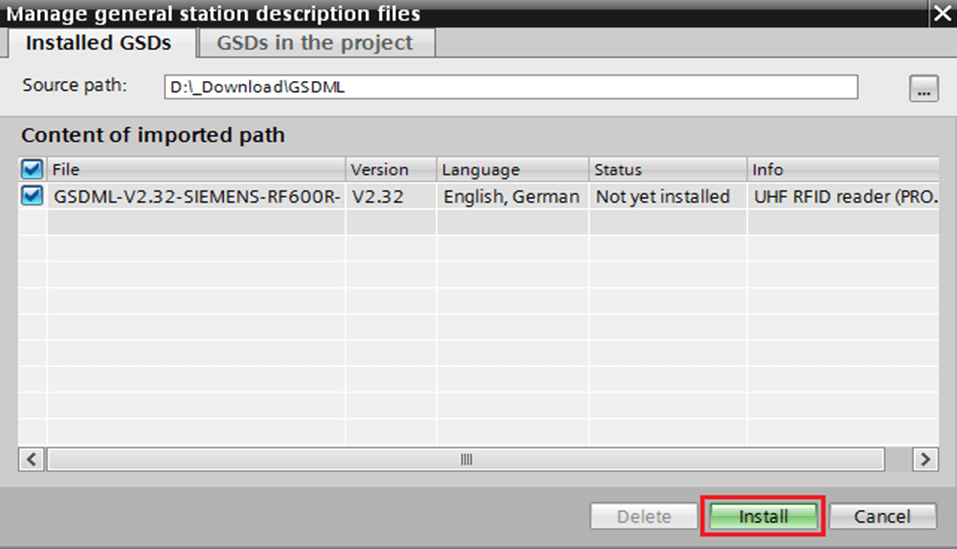
参考资源链接:[解决STEP7中GSD安装失败问题:解除引用后重装](https://wenku.csdn.net/doc/6412b5fdbe7fbd1778d451c0?spm=1055.2635.3001.10343)
# 1. STEP7 GSD文件简介
在自动化和工业控制系统领域,STEP7(也称为TIA Portal)是西门子广泛
【安全运行BAT文件】:后台执行时如何避免权限问题和安全风险
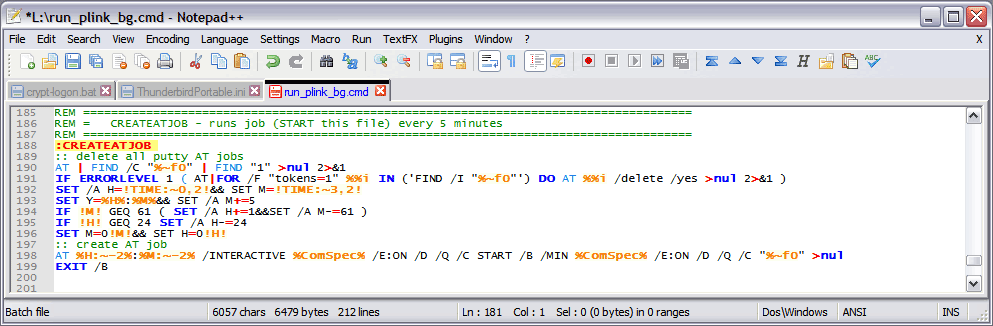
参考资源链接:[Windows下让BAT文件后台运行的方法](https://wenku.csdn.net/doc/32duer3j7y?spm=1055.2635.3001.10343)
# 1. BAT文件概述与安全运行的重要性
在本章中,我们将先概述BAT文件的基本概念以及其在Windows操作系统中的应用。我们会探讨什么是BAT文件以及它们如何被设计用于自动化常见的命令行任务。通
【GX Works3与工业物联网】:连接智能设备与工业云的策略,开启工业4.0之旅

参考资源链接:[三菱GX Works3编程手册:安全操作与应用指南](https://wenku.csdn.net/doc/645da0e195996c03ac442695?spm=1055.2635.3001.10343)
# 1. GX Works3与工业物联网概述
在工业自动化领域,GX Works3软件与工业物联网技术的结合日益紧密。GX Works3作为三菱电机推出
【高级电路故障排除】:PIN_delay设置错误的诊断与修复,恢复系统稳定性
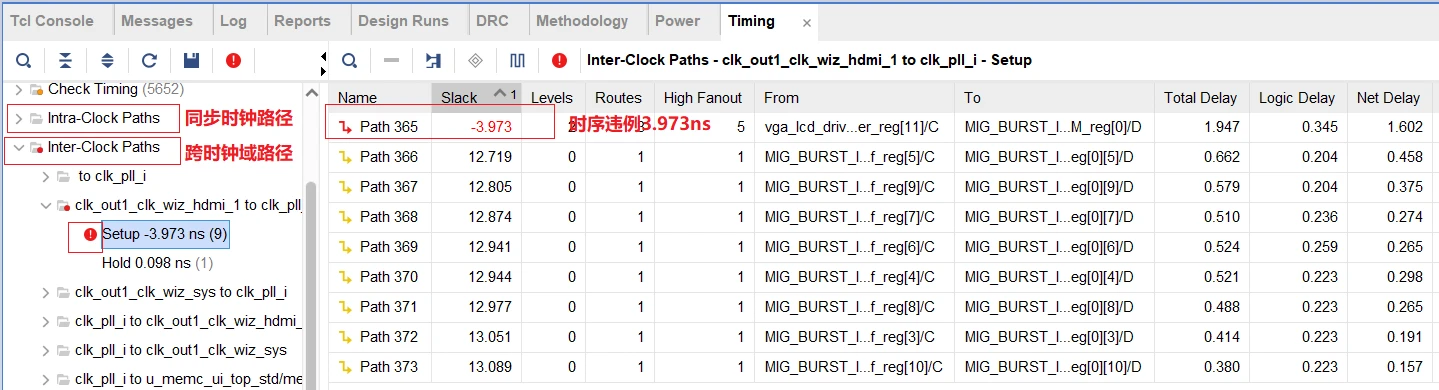
参考资源链接:[Allegro添加PIN_delay至高速信号的详细教程](https://wenku.csdn.net/doc/6412b6c8be7fbd1778d47f6b?spm=1055.2635.3001.10343)
# 1. PIN_delay设置的重要性与影响
在当今的IT和电子工程领域,PIN_delay参数的设置对于确保系统稳定性和
【嵌入式系统内存】:DDR4 SODIMM应用,性能与可靠性并重

参考资源链接:[DDR4_SODIMM_SPEC.pdf](https://wenku.csdn.net/doc/6412b732be7fbd1778d496f2?spm=1055.2635.3001.10343)
# 1. 嵌入式系统内存概述
嵌入式系统广泛应用于消费电子、医疗设备、工业自动化等领域,其内部组件对性能和稳定性要求严苛。内存作为系统核心组件之一,承担着存储
【OptiXstar V173日志管理艺术】:Web界面操作日志的记录与分析
参考资源链接:[华为OptiXstar V173系列Web界面配置指南(电信版)](https://wenku.csdn.net/doc/442ijfh4za?spm=1055.2635.3001.10343)
# 1. OptiXstar V173日志管理概述
随着信息技术的飞速发展,日志管理在系统维护和安全监控中扮演着越来越重要的角色。本章将首先概述O
【故障诊断艺术】:用DDR Margin测试揭示内存问题,成为内存维修大师
参考资源链接:[DDR Margin测试详解与方法](https://wenku.csdn.net/doc/626si0tifz?spm=1055.2635.3001.10343)
# 1. DDR Margin测试的基本概念和重要性
## 1.1 DDR Margin测试简介
DDR Margin测试是评估内存系统稳定性的关键手段,通过对信号的电压和时序进行调整,确保系统在各种条
【防止过拟合】机器学习中的正则化技术:专家级策略揭露

参考资源链接:[《机器学习(周志华)》学习笔记.pdf](https://wenku.csdn.net/doc/6412b753be7fbd1778d49
GNSS高程数据质量控制大揭秘:确保数据结果无懈可击

参考资源链接:[GnssLevelHight:高精度高程拟合工具](https://wenku.csdn.net/doc/6412b6bdbe7fbd1778d47cee?spm=1055.2635.3001.10343)
# 1. GNSS高程数据概述
GNSS(全球导航卫星系统)技术在全球范围内被
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )