




STM32单片机RTOS应用:多任务编程的艺术,解锁单片机新境界
发布时间: 2024-07-02 22:39:46 阅读量: 88 订阅数: 100 

STM32的UCOSII消息队列程序,亲测可用
1. STM32单片机RTOS简介
实时操作系统(RTOS)是一种专门为嵌入式系统设计的操作系统,它提供了一组API,用于管理任务调度、同步和通信。对于STM32单片机,RTOS可以显著提高系统的实时性和可靠性,使其能够处理复杂的多任务应用。
RTOS的主要功能包括:
- **任务管理:**创建、删除和调度任务。
- **同步和通信:**使用信号量、队列和邮箱等机制实现任务之间的同步和通信。
- **中断管理:**处理中断并将其与任务调度集成。
2. 多任务编程基础
2.1 任务调度与优先级
任务调度
任务调度是 RTOS 的核心功能之一,负责管理系统中的任务,确保它们以可预测的方式执行。RTOS 提供了多种调度算法,如轮询调度、优先级调度、时间片轮转调度等。
优先级
任务优先级是一个数字值,用于指示任务的重要性。优先级高的任务在调度时具有更高的优先级,可以优先执行。RTOS 通常允许为每个任务分配不同的优先级,从而实现任务之间的优先级控制。
2.2 任务同步与通信
任务同步
任务同步机制用于确保多个任务协调地执行。常见的任务同步机制包括:
- **信号量:**一种二进制信号,用于表示资源是否可用。任务可以等待信号量,直到它变为可用,然后再继续执行。
- **互斥量:**一种锁机制,用于保护共享资源。一次只能有一个任务访问受互斥量保护的资源。
- **事件标志组:**一种位掩码,用于表示多个事件的发生。任务可以等待事件标志组中的特定位被置位,然后再继续执行。
任务通信
任务通信机制用于在任务之间传递数据。常见的任务通信机制包括:
- **消息队列:**一种先进先出(FIFO)队列,用于在任务之间传递消息。
- **管道:**一种双向通信机制,允许任务之间直接交换数据。
- **共享内存:**一种内存区域,允许任务之间共享数据。
2.3 中断与任务调度
中断
中断是一种硬件事件,会暂停当前正在执行的任务并跳转到中断服务例程 (ISR)。ISR 是一个专门处理中断事件的函数。
中断与任务调度
中断可以影响任务调度。当中断发生时,RTOS 会暂停当前正在执行的任务,并执行 ISR。ISR 执行完成后,RTOS 会重新调度任务,并选择优先级最高的任务执行。
代码示例:


 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )

专栏简介
欢迎来到 STM32 单片机编程语言专栏!本专栏旨在为初学者和经验丰富的程序员提供全面的 STM32 编程指南。我们涵盖了从 C 语言编程到汇编语言、外设驱动开发、RTOS 应用、中断机制、调试技巧、通信接口、定时器应用、ADC 和 DAC 技术、PWM 技术、DMA 技术、传感器接口、液晶显示技术、触摸屏技术、USB 通信技术、以太网通信技术、CAN 总线通信技术和 Modbus 通信技术等各个方面。通过一系列实战案例和深入的讲解,您将掌握 STM32 单片机编程的精髓,从新手成长为大师,解锁单片机世界的无限可能!
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【AI扩写技术深度解析】:掌握微头条创作的艺术与科学,提升内容质量
# 摘要
随着人工智能技术的快速发展,AI扩写技术在微头条创作领域的应用逐渐兴起,为内容创作带来了新的艺术与科学的融合。本文首先概述了AI扩写技术的基本概念及其在微头条创作中的理论基础,包括内容创作的艺术性探讨和科学性分析。随后,详细介绍了AI扩写技术的实际应用案例,包括不同AI文本生成工具的介绍与使用指南,以及AI在优化微头条内容质量上的
【H6性能调优】:软硬件协同,效率倍增的优化方法

# 摘要
H6处理器作为新一代计算平台的核心,其性能优化是实现高效能硬件系统的关键。本文首先介绍了H6处理器的基本情况和性能特点,然后深入探讨了性能优化的理论基础,包括性能度量标准、硬件性能参数解读以及软硬件协同工作原理。第三章和第四章详细分析了硬件层面和软件层面的性能优化策略,例如硬件升级方案、散热技术、操作系统和应用程序
【编程语言词汇精通】:从韦氏词典学习,让编程术语不再难!

# 摘要
本文全面探讨了编程语言中词汇的基础与深入理解,实践应用,以及进阶探索。首先介绍了编程语言词汇的基本认知和深入理解,包括关键字与保留字的区别、数据类型与变量的生命周期、以及控制结构与数据流的优化技巧。其次,详细解析了面向对象编程、错误处理、异常处理和高级编程模式的相关词汇。进阶探索部分则涉及了函数式编程、并发编程的术语与技术、代码重构与优化方法。最后,展望了新兴编程语言趋势、编程词汇与人工智能的关系,以及持续学习
SAE J2284-5-201609:车载网络协议栈实现的挑战与创新对策

# 摘要
随着智能网联汽车的迅速发展,车载网络协议栈作为车辆通信的核心技术,其稳定性和安全性日益受到重视。本文首先概述了车载网络协议栈的基本概念,并对SAE J2284-5标准进行了深入分析,探讨了其历史背景和技术要求。接着,本文着重讨论了实现车载网络协议栈时面临的技术挑战,包括硬件接口的兼容性、软件协议的复杂性以及安全性和实时性保证。此外,文章提出了一系列创新对策,如模块化设计、先进软件工具和技术以及云计算和大数据的应用,并通过案例研究展示了SAE
实时电能监控系统设计优化:IEC62057-1标准的实施要点
# 摘要
本文深入探讨了IEC62057-1标准下实时电能监控系统的构建与优化。首先概述了IEC62057-1标准的关键内容,并分析了实时电能监控系统设计的基本原理,包括其理论基础、架构设计以及功能要求。随后,本文详细阐述了在IEC62057-1标准指导下的系统实施要点,包括硬件和软件的
【深入线路阻抗的世界】:理论实践双丰收,让你成为领域专家
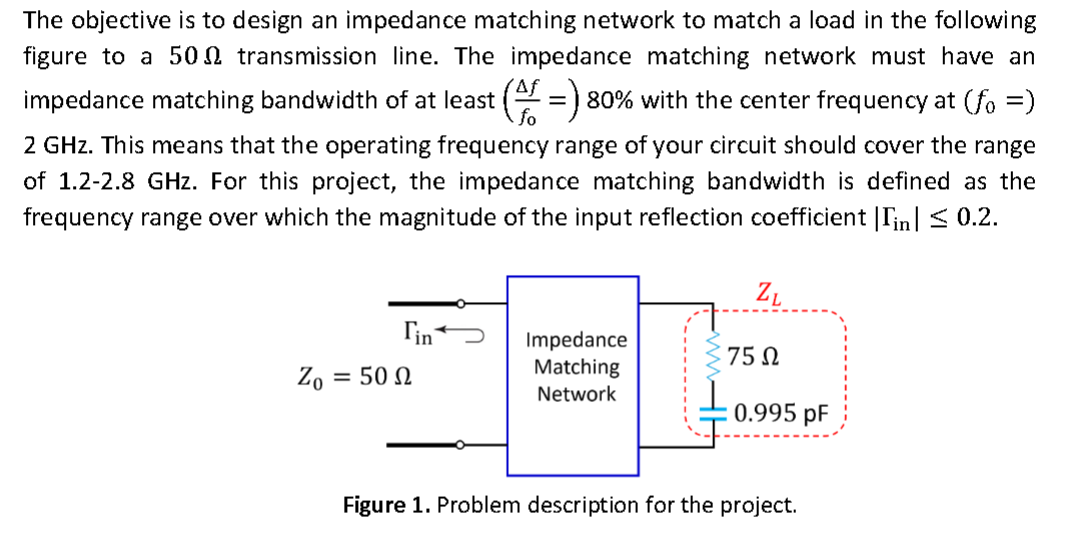
# 摘要
本文全面探讨了线路阻抗的概念、理论基础、实践经验以及在电路性能优化中的应用。首先解析了电阻、电感和电容在阻抗中的作用,并介绍了阻抗的数学模型和测量技术。接着,结合实验室实践,阐述了阻抗测量的步骤和技巧、阻抗匹配的工程应用及其在信号完整性中的关键作用。文中还分析了阻抗对电路稳定性和效率的影响,高频电路中的阻抗匹配与调整,以及阻抗模拟和电路仿真技术。此外,
RTOS编程揭秘:嵌入式C语言在实时操作系统中的应用

# 摘要
实时操作系统(RTOS)是嵌入式系统开发中的核心,本文从RTOS编程基础和嵌入式C语言的特点出发,深入探讨了并发编程模型和任务管理策略,以及中断服务程序和定时器的高级使用。文章还分析了RTOS系统机制,包括内核架构、内存管理、系统资源和电源管理。最后,探讨了RTOS的高级特性,如中间件、安全机制和实时性能优化,并结合案例研究,展示了RTOS在实际
【地理统计学神器】:莫兰指数入门到精通,案例与实践全覆盖

# 摘要
莫兰指数是地理统计学中用于衡量空间自相关性的关键工具,对于理解各种地理现象的空间分布和关联性具有重要作用。本文系统地介绍了莫兰指数的理论基础、计算方法和统计性质,并通过多个应用案例展示了其在公共卫生、城市规划与管理以及环境科学中的实际应用。此外,本文还探讨了莫兰指数在高级分析技术中的应用,包括时间序列分析、多变量分析和地理信息系统(GIS)集成。文章还指出了
【PHP基础与整合】:后端开发不再是难题,电影网站一体化解决方案

# 摘要
本文全面概述了PHP作为动态网页开发语言的基础知识,核心编程技巧,以及如何与数据库进行高效整合。文章从基础知识开始,逐步深入到高级功能和项目实战经验,重点介绍了数据类型、控制结构、面向对象编程、数据库管理、安全性提升策略、性能优化、API开发和微服务架构。通过实战案例分析,本文帮助开发者提升前端用户体验和后端服务的整合能力,确保开发的电影网站项目既安全又高效。特
性能调优:PRTG监控高级技巧提升效率
# 摘要
本文系统地介绍并分析了PRTG监控系统的核心概念、基础理论、高级配置技巧以及性能优化实践。首先概述了PRTG监控系统的基本工作原理和监控对象,随后深入探讨了关键性能指标的理解、数据采集和分析方法。在高级配置方面,提出了设备与传感器的配置技巧、数据管理策略以及自动化响应系统的设计,进一步提高了监控效率和及时性。本文还着重分析了性能优化的基本策略,包括硬件资源利用和负载均衡,并
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















