斯坦福凸优化高级主题:深度学习与优化的结合策略
发布时间: 2024-12-27 13:13:38 阅读量: 17 订阅数: 20 

幼儿园安全教育管理.pptx
# 摘要
在深度学习的背景下,凸优化扮演着至关重要的角色,它提供了强大的数学框架以确保算法的收敛性和性能。本文首先强调了凸优化在深度学习中的重要性,并系统地介绍了凸优化的基础理论,包括线性代数、凸集、凸函数及其性质,以及凸优化问题的标准形式。随后,文章深入探讨了应用于深度学习的各类优化算法,如梯度下降法及其变种、二阶优化方法和自适应学习率优化器,并讨论了这些方法在不同网络结构中的实践。文章还涉及了凸优化算法的进阶应用,如非光滑凸优化问题、大规模优化与分布式算法、凸优化问题的近似方法。最后,本文展望了凸优化与深度学习结合的未来方向,包括端到端学习与优化策略、非凸问题的凸化技术以及凸优化在新兴领域的应用。通过对凸优化的深入解析,本文旨在为深度学习的研究和实践提供理论支持和技术指导。
# 关键字
凸优化;深度学习;梯度下降法;自适应学习率;非光滑凸优化;端到端学习
参考资源链接:[斯坦福大学经典教材:凸优化Convex Optimization](https://wenku.csdn.net/doc/52yvtdmayv?spm=1055.2635.3001.10343)
# 1. 凸优化在深度学习中的重要性
在深度学习领域,凸优化技术扮演着至关重要的角色。由于神经网络的损失函数往往复杂且非凸,传统的优化方法可能难以找到全局最优解。然而,通过将凸优化的概念与技术应用到深度学习中,我们可以更有效地解决这些挑战。例如,凸优化可以帮助我们设计出更稳健的损失函数,这些损失函数即使在面对大规模数据和复杂网络结构时,也能够保持其凸性。因此,凸优化不仅能帮助我们更好地训练模型,而且还能提供理论上的性能保证,使深度学习的应用更加广泛和可靠。在接下来的章节中,我们将详细介绍凸优化的基础理论,以及在深度学习中的具体应用和优化算法。
# 2. 凸优化基础理论
## 2.1 线性代数与凸集
### 2.1.1 矩阵理论基础
在凸优化领域,矩阵理论作为基础工具之一,起到了关键作用。理解矩阵的性质可以帮助我们更好地把握凸集和凸函数的性质。矩阵的特征值和特征向量,矩阵的正定性和半正定性等概念,都是描述线性代数结构和优化问题中不可或缺的要素。
矩阵的特征值和特征向量描述了线性变换对向量方向和长度的影响。对于一个n×n的矩阵A来说,如果存在非零向量v和标量λ,满足Av = λv,那么λ就是矩阵A的一个特征值,v则是对应的特征向量。正定矩阵和半正定矩阵的性质在凸优化问题中尤为重要,它们保证了目标函数的凸性,这对于求解优化问题至关重要。
正定矩阵满足所有的特征值都是正的,它对应的二次型函数是严格凸的。半正定矩阵的特征值非负,它对应的二次型函数是非负的(即凸的)。通过特征值分解和奇异值分解等手段,我们可以深入理解和操作矩阵,这对于设计有效的优化算法有着重要的意义。
### 2.1.2 凸集的定义与性质
凸集是指在欧几里得空间中,任意两点之间的线段仍然全部属于该集合。换句话说,如果集合C中的任意两个点x和y,以及任意的实数t(0≤t≤1),都有tx + (1-t)y属于集合C,那么集合C就是凸集。
凸集有许多重要性质,对于凸集的讨论可以帮助我们更好地理解凸优化问题的约束条件。例如,两个凸集的交集仍然是凸集,凸集的并集不一定是凸集。凸集的闭包和内部也是凸集,而凸集的补集不一定凸。此外,凸集中的任意两点间的凸组合都可以生成整个凸集,这在理解如何通过边界点的线性组合来描述凸集时非常有用。
理解凸集的一个直观方法是观察它们在几何空间中的表现。例如,线段、多边形、球体等都是凸集的例子。通过这些几何形状,可以直观地感知凸集的定义和性质。另外,凸集可以通过超平面(即n维空间中的n-1维平面)来界定。集合中的点如果都在超平面的同一侧,则该集合是凸集。
## 2.2 凸函数及其性质
### 2.2.1 函数的凹凸性判别
在凸优化中,函数的凹凸性是描述函数局部与全局最优性质的重要概念。对于一个定义在凸集上的实值函数f(x),如果对于任意的x1和x2属于函数的定义域,以及任意的实数t(0≤t≤1),都有:
f(tx1 + (1-t)x2) ≤ tf(x1) + (1-t)f(x2)
那么函数f(x)被称为凸函数。如果等号不成立,则被称为严格凸函数。反之,如果上述不等式反向成立,则函数是凹函数;如果严格反向成立,则称为严格凹函数。
函数的凹凸性可以通过二阶导数来判断。对于光滑函数f(x),如果对于定义域内的所有x,Hessian矩阵(即函数二阶导数组成的矩阵)是半正定的(在二元函数情况下,偏导数的二阶混合偏导数等于二阶偏导数),那么函数是凸的;如果Hessian矩阵是正定的,则函数是严格凸的。
凹凸性的判别对于优化问题至关重要,因为凸函数具有全局最优解,而非凸函数可能拥有多个局部最优解。这一性质在设计全局最优算法时起着决定性作用。
### 2.2.2 凸函数的优化条件
凸函数的优化条件是寻找最优解的基础,对于凸优化问题而言,求解局部最优解即是求解全局最优解。对于凸函数而言,任何局部最小点必定是全局最小点。因此,凸优化问题的求解相对简单。
凸函数优化条件中最重要的是梯度为零的点必然是全局最小点。这为使用梯度下降等优化方法提供了理论保证。具体来说,对于凸函数f(x),如果存在一个点x*,使得梯度∇f(x*) = 0,则x*是f(x)的一个全局最小点。
此外,若函数f(x)是严格凸函数,那么它的最小点是唯一的。这意味着,如果在优化过程中能够找到梯度为零的点,我们就可以确定该点就是最优解。
在实际操作中,经常使用的是KKT(Karush-Kuhn-Tucker)条件,这是针对带约束的优化问题提出的条件。当一个优化问题满足一定的正则性条件时,如Slater条件,KKT条件是求解最优解的必要条件,对于凸优化问题而言,它们也是充分条件。
## 2.3 凸优化问题的标准形式
### 2.3.1 目标函数和约束条件
凸优化问题的标准形式通常表示为:
minimize f_0(x)
subject to f_i(x) ≤ 0, i = 1, ..., m
A_jx = b_j, j = 1, ..., p
其中,x是决策变量,f_0是需要最小化的凸目标函数,f_i是不等式约束条件,表示为凸函数,A_j是等式约束条件的系数矩阵,b_j是常数项。
目标函数f_0(x)通常是关于变量x的凸函数,而约束条件f_i(x) ≤ 0则构成了一个凸集,确保了问题的可行性。等式约束A_jx = b_j则界定了一个仿射子空间。在凸优化问题中,所有的不等式约束和目标函数都必须是凸的,而等式约束则不限于凸性。
标准形式的凸优化问题易于理解和处理,因为它们能够确保全局最优解的存在,并且各种算法可以直接应用于求解这类问题。同时,这个形式也允许在问题中引入正则化项,这些项虽然不是严格的约束,但通过修改目标函数,可以改善问题的性质,提高算法的性能。
### 2.3.2 典型的凸优化问题实例
凸优化问题在工程、经济、统计和机器学习等领域中非常常见。以下是一些典型的凸优化问题实例:
1. 线性规划:当目标函数f_0(x)和约束函数f_i(x)均为仿射函数时,问题变为线性规划问题。线性规划是应用最广泛的凸优化问题之一。
2. 二次规划:如果目标函数f_0(x)是变量x的二次函数,且约束函数f_i(x)为线性函数,则称为二次规划问题。二次规划在金融投资组合优化和控制理论中有着重要应用。
3. 半定规划:当问题的约束条件包括半正定矩阵条件时,问题则为半定规划问题。半定规划在系统控制和优化设计中有着广泛的应用。
4. 凸几何问题:如最小体积的椭球包围给定集合、最小表面积的凸多面体覆盖给定点集等问题,这些都属于凸几何问题,其目标函数和约束条件都可以表示为凸集的形式。
5. 学习问题:在机器学习中,许多目标函数都可以表示为凸函数,如支持向量机(SVM)、最大间隔分类等。
通过解决这些典型的凸优化问题实例,不仅可以加深对凸优化理论的理解,还能够掌握实际应用中凸优化问题的求解技巧。
在下一章节中,我们将继续深入探讨在深度学习中凸优化如何发挥作用,以及针对优化问题具体是如何应用的。
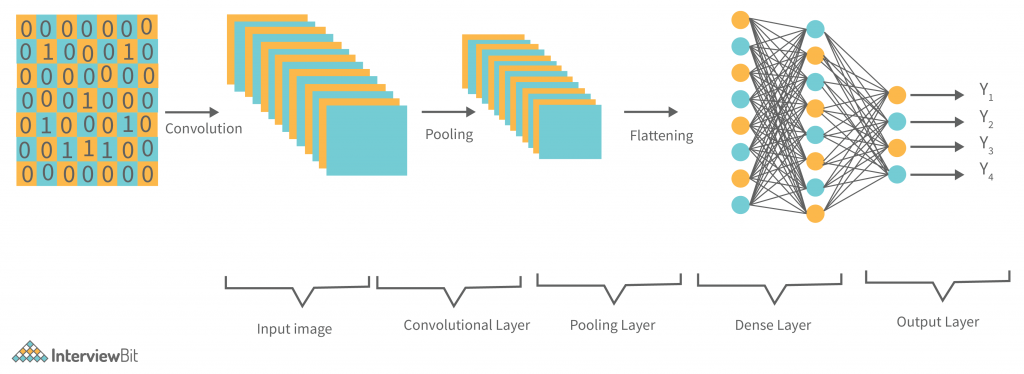
# 3. 深度学习中的优化算法
## 3.1 梯度下降法及其变种
### 3.1.1 批量、随机和小批量梯度下降
梯度下降法是一种用于优化问题的迭代算法,尤其在深度学习中广泛使用。根据更新参数时使用样本量的不同,梯度下降可以分为批量梯度下降(Batch Gradient Descent)、随机梯度下降(Stochastic Gradient Descent, SGD)和小批量梯度下降(Mini-batch Gradient Descent)。
批量梯度下降是最传统的形式,每次更新参数时,它会使用整个训练集的平均梯度。虽然这种方法通常能够找到接近全局最小值的点,但其缺点是计算成本高,尤其是在训练数据量非常大的情况下。
随机梯度下降是批量梯度下降的另一种极端,它在每一步迭代中只使用一个样本的梯度,因此计算代价小,更新速度快,但这通常导致收敛过程不稳定,并且容易陷入局部最小值。
小批量梯度下降试图在两者之间取得平衡。它在每次迭代中使用一小批样本来计算梯度。这种方法既可以保持较好的收敛速度,同时又能通过批量的统计特性来减少梯度估计的方差,提高了算法的稳定性。
```python
import numpy as np
# 示例:实现简单的批量梯度下降
def batch_gradient_descent(X, y, theta, learning_rate, iterations):
m = len(y)
J_history = np.zeros((iterations, 1))
for i in range(iterations):
predictions = X.dot(theta)
errors = predictions - y
gradient = (1/m) * X.T.dot(errors)
theta = theta - learning_rate * gradient
J_history[i] = compute_cost(X, y, theta)
return theta, J_history
def compute_cost(X, y, theta):
m = len(y)
errors = X.dot(theta) - y
cost = (1/(2*m)) * np.sum(errors**2)
return cost
# 假设的参数和数据
X = np.array([[1, 2], [3, 4]])
y = np.array([5, 6])
theta = np.array([[0], [0]])
learning_rate = 0.01
iterations = 1000
theta, J_history = batch_gradient_descent(X, y, theta, learning_rate, iterations)
print("Optimized theta:", theta)
```
该代码段展示了批量梯度下降的实现。`batch_gradient_descent`函数接受特征矩阵`X`、目标向量`y`、参数向量`theta`、学习率`learning_rate`和迭代次数`iterations`作为输入,输出优化后的参数向量和每次迭代的成本历史。
### 3.1.2 动量法和Nesterov加速梯度
为了解决梯度下降过程中的震荡问题,提出了动量法(Momentum)和Nesterov加速梯度(NAG)。动量法通过引入速度项来加速梯度下降,并在一定程度上减少震荡。这个速度项是先前梯度的加权平均值,它会持续累积并逐渐过滤掉那些波动较大的方向。
Nesterov加速梯度是一种优化了动量法的方法,它在计算梯度时考虑了速度项,这使得梯度计算更接近于参数更新之后的值,从而提前进行下一步的优化。
```python
def nesterov_gradient_descent(X, y, theta, learning_rate, iterations, beta):
m = len(y)
v = np.zeros(theta.shape)
J_history = np.zeros((iterations, 1))
for i in range(iter
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏汇集了斯坦福大学凸优化教材的精华内容,提供了一系列深入浅出的文章,旨在帮助读者快速掌握凸优化理论与应用。从入门基础知识点到复杂对偶理论,专栏内容涵盖了凸优化各个方面。通过对斯坦福教材的深入解读,读者可以了解凸优化在实际问题中的应用,并掌握解决真实世界问题的实用技巧。专栏文章清晰易懂,既适合初学者入门,也适合进阶者拓展知识。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MATLAB编程案例研究】:揭秘超级玛丽游戏逻辑构建的8个步骤
# 摘要
本文探讨了使用MATLAB进行游戏开发的基础知识,涵盖了游戏环境的设置、变量定义、角色与控制逻辑、游戏逻辑的实现与优化,以及音效与动画效果的增强。重点讨论了游戏界面的搭建,包括组件布局和图形渲染,以及变量和数据结构在游戏开发中的应用。文章还详细分析了角色行为定义、控制器与角色动作映射,并介绍了游戏核心逻辑构建与性能优化策略。此外,本文还探讨了音效与动画效果的集成方法,以及在游戏测试、缺陷修复、打包部署和跨平台优
【紧急任务!】:快速掌握simset函数,提升你的Simulink仿真效率

# 摘要
本文旨在全面介绍Simulink仿真环境中的si
BP10系列设计实践:掌握高效布局布线与热管理的5大秘诀
# 摘要
随着电子产品的高速化和小型化,高效布局布线与热管理成为了设计中的关键环节。本文从理论基础出发,详细探讨了PCB布局和布线的最佳实践,包括信号完整性和电磁兼容性原则、高速电路布局考量、功率器件布局与散热措施,以及布线的高速信号要求和特殊信号布线技术。此外,本文还分析了热管理的理论基础、热设计实践技巧以及与布局布线的协同作用。通过综合案例分析,本文总结了布局布线与热管理的关键技巧,并展望了新技术趋势对这些领域的影响。本文旨在为电子设计工程师提供全面的指导,以优化设计,提升产品性能和可靠性。
# 关键字
高效布局布线;热管理;信号完整性;电磁兼容;散热策略;高速电路设计
参考资源链接:
无线供电系统设计全攻略:接收端关键要点深度解析
# 摘要
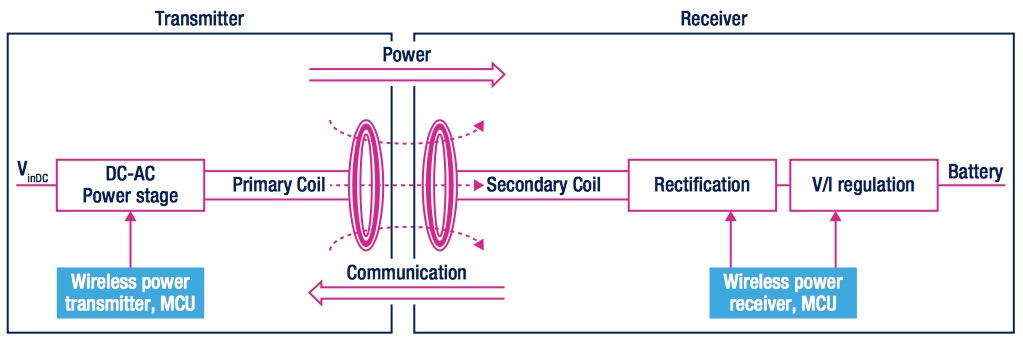
无线供电技术作为一种新兴的电力传输方式,具有巨大的应用潜力和发展前景。本文首先对无线供电技术进行概述,然后深入探讨了接收端组件的设计原理、关键技术和优化方法。文章详细分析了接收端天线、电路设计以及能量管理策略,并对磁共振耦合、微波传输和超声波能量传输等关键技术进行了系统的阐述。在接收端系统集成与测试方面,本文讨论了集成过程中的挑战、效率与性能测试以及安全性评估。最后
【通信可靠性保障】:正交曲线网格与信道编码的策略实施
# 摘要
本文综合探讨了通信可靠性保障的关键技术,包括正交曲线网格理论基础、信道编码原理、正交曲线网格与信道编码的结合策略、实际应用中的挑战与解决方案以及未来发展方向与趋势预测。文章首先介绍了正交曲线网格的定义、特性、设计原则及其在通信系统中的应用和优势。其次,详细阐述了信道编码技术,包括常见编码方法和性能评估标准。
DE2-115开发环境搭建:手把手教你配置系统,节省80%配置时间
# 摘要
DE2-115开发板作为一款功能强大的FPGA开发平台,适用于多种教育和工业应用。本文首先介绍了DE2-115开发板的基本概况和开发环境的基础配置,包括硬件规格、软件需求以及Quartus II和ModelSim仿真工具的安装与设置。随后,文章详述了开发环境的高级配置技巧,旨在帮助开发者缩短编译时间,实现高效硬件调试,以及利用IP核加速开发流程。在实践应用章节中,作者分享了基于FPGA的简单项目实现,高级项目案例分析,以及如何通过资源分享与社区支持来进一步扩展开发能力。文章最后探讨了DE2-115开发环境的常见问题及解决方法,并对其未来展望与扩展进行了探讨,包括设计理念更新和开发环境
【FPGA硬件设计挑战】:提升MPU6050读取速度的前沿策略
# 摘要
本文对FPGA与MPU6050的集成应用进行了深入研究,旨在优化MPU6050的读取速度并提升FPGA硬件设计的性能。首先概述了FPGA和MPU6050的基础知识,接着详细探讨了FPGA硬件设计基础,包括其工作原理、编程配置过程、MPU6050的功能及与FPGA通信协议的接口设计。然后,文章重点介绍了通过硬件策略提升MPU6050读取速度的几种方法,如优化时钟管理、并行处理技术及存储系统
CTSIM进阶技能:掌握自定义扫描协议与图像处理
# 摘要
本论文详细探讨了CTSIM技术中的自定义扫描协议基础及其在图像处理中的应用。首先介绍了CTSIM自定义扫描协议的设计原理和实现技术,包括协议数据的封装解封装、编程语言选择和安全机制。随后,论文深入分析了图像处理的基本概念、关键技术以及相关工具和库的性能评估。在实际应用部分,讨论了图像重建算法、图像质量分析与优化,以及图像处理自动化与智能化的进展。最后,通过实
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )