单片机舵机控制程序的跨学科融合:与其他领域的协同创新
发布时间: 2024-07-13 20:12:21 阅读量: 49 订阅数: 21 

# 1. 单片机舵机控制程序的理论基础
舵机是一种将电信号转换成机械运动的执行器,广泛应用于机器人、智能家居等领域。单片机舵机控制程序是实现舵机控制的关键,其理论基础涉及以下几个方面:
- **舵机的工作原理:**舵机内部包含一个直流电机、齿轮组和位置传感器,通过控制电机的正反转和转速来实现舵臂的旋转。
- **舵机驱动电路:**舵机驱动电路负责为舵机电机提供电流,并控制电机的正反转。常见的驱动电路包括 H 桥和 MOS 管驱动电路。
- **单片机与舵机通信协议:**单片机与舵机通过特定的通信协议进行交互,常用的协议包括 PWM(脉宽调制)和串行通信协议。
# 2. 单片机舵机控制程序的实践实现
### 2.1 舵机原理及驱动电路设计
#### 2.1.1 舵机的工作原理
舵机是一种能够根据控制信号调整自身角度的执行器,广泛应用于机器人、智能家居等领域。其工作原理基于脉宽调制(PWM)信号的控制。
舵机内部包含一个直流电机、一个减速齿轮组和一个位置传感器。当施加PWM信号时,电机驱动齿轮组旋转,带动舵机轴转动。PWM信号的脉冲宽度决定了舵机轴的转动角度。
#### 2.1.2 舵机驱动电路的搭建
为了控制舵机,需要设计一个驱动电路,将单片机的PWM信号转换为适合舵机使用的电压和电流。常见的舵机驱动电路包括:
- **H桥驱动电路:**使用两个H桥电路,分别控制电机正转和反转。
- **MOSFET驱动电路:**使用MOSFET晶体管,通过开关控制电机电流。
### 2.2 单片机与舵机通信协议
#### 2.2.1 PWM信号的生成与控制
单片机通过生成PWM信号来控制舵机。PWM信号的频率通常为50Hz,脉冲宽度范围为500μs~2500μs。脉冲宽度与舵机轴的转动角度成正比,即脉冲宽度越大,舵机轴转动角度越大。
#### 2.2.2 舵机控制指令的发送
除了PWM信号外,单片机还需要发送控制指令给舵机。舵机控制指令通常包含以下信息:
- **目标角度:**舵机轴转动的目标角度。
- **速度:**舵机轴转动的速度。
- **扭矩:**舵机轴输出的扭矩。
### 2.3 单片机舵机控制程序设计
#### 2.3.1 程序流程设计
单片机舵机控制程序的流程通常如下:
1. 初始化单片机和舵机驱动电路。
2. 根据目标角度生成PWM信号。
3. 发送舵机控制指令。
4. 接收舵机反馈信息(可选)。
5. 循环执行步骤2-4。
#### 2.3.2 代码编写与调试
```c
#include <stdio.h>
#include <stdlib.h>
#include <stm32f10x.h>
// 定义舵机控制引脚
#define SERVO_PIN GPIO_Pin_9
#define SERVO_PORT GPIOB
// PWM定时器配置结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// PWM输出比较结构体
TIM_OCInitTypeDef TIM_OCInitStructure;
// 初始化舵机控制引脚
void Servo_Init(void)
{
// 使能舵机控制引脚时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 设置舵机控制引脚为推挽输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = SERVO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SERVO_PORT, &GPIO_InitStructure);
}
// 设置舵机角度
void Servo_SetAngle(uint16_t angle)
{
// 计算PWM脉冲宽度
uint16_t pulse_wi
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨单片机舵机控制程序的各个方面,从原理、实现到优化,涵盖接口设计、上位机通信、传感器融合和在机器人、工业自动化、医疗设备、无人机、玩具等领域的应用。专栏还提供了开源社区、行业标准、教育培训、认证资质、商业化应用、伦理影响和跨学科融合等相关信息。通过全面深入的分析,本专栏旨在帮助读者了解单片机舵机控制程序的奥秘,掌握其设计、开发和应用的技巧,并为相关领域的创新和发展提供有价值的参考。
专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【formatR包兼容性分析】:确保你的R脚本在不同平台流畅运行
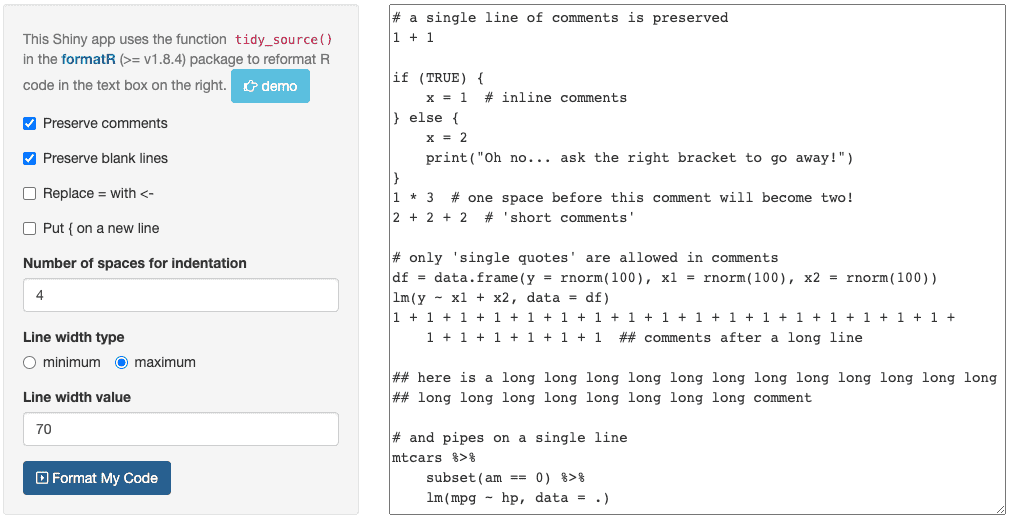
# 1. formatR包简介与安装配置
## 1.1 formatR包概述
formatR是R语言的一个著名包,旨在帮助用户美化和改善R代码的布局和格式。它提供了许多实用的功能,从格式化代码到提高代码可读性,它都是一个强大的辅助工具。通过简化代码的外观,formatR有助于开发人员更快速地理解和修改代码。
## 1.2 安装formatR
安装formatR包非常简单,只需打开R控制台并输入以下命令:
```R
install.pa
R语言数据处理高级技巧:reshape2包与dplyr的协同效果
# 1. R语言数据处理概述
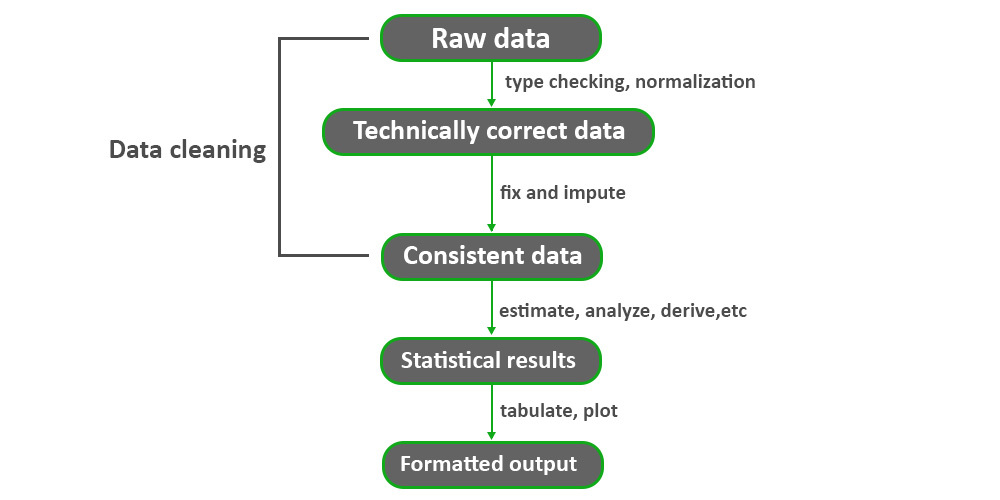
在数据分析和科学研究中,数据处理是一个关键的步骤,它涉及到数据的清洗、转换和重塑等多个方面。R语言凭借其强大的统计功能和包生态,成为数据处理领域的佼佼者。本章我们将从基础开始,介绍R语言数据处理的基本概念、方法以及最佳实践,为后续章节中具体的数据处理技巧和案例打下坚实的基础。我们将探讨如何利用R语言强大的包和
【R语言Capet包集成挑战】:解决数据包兼容性问题与优化集成流程
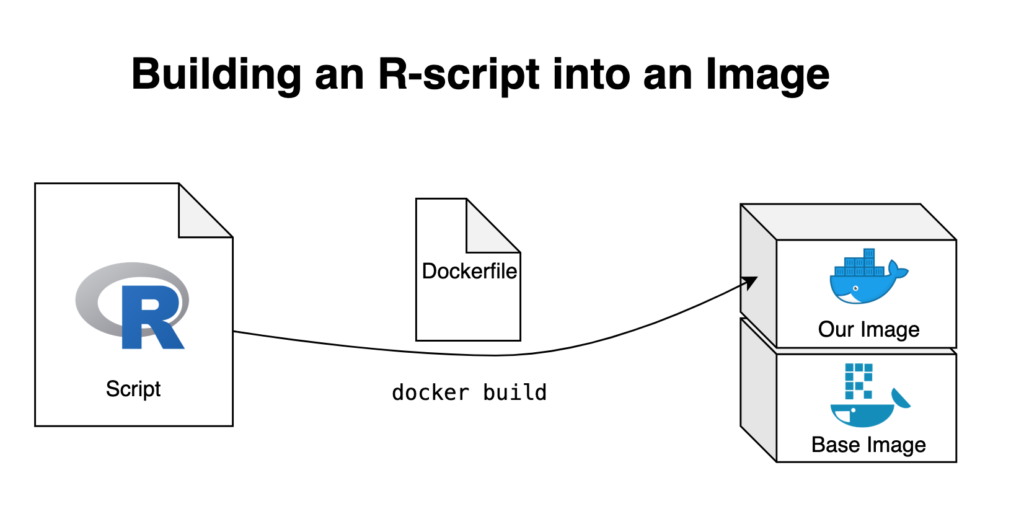
# 1. R语言Capet包集成概述
随着数据分析需求的日益增长,R语言作为数据分析领域的重要工具,不断地演化和扩展其生态系统。Capet包作为R语言的一个新兴扩展,极大地增强了R在数据处理和分析方面的能力。本章将对Capet包的基本概念、功能特点以及它在R语言集成中的作用进行概述,帮助读者初步理解Capet包及其在
时间数据统一:R语言lubridate包在格式化中的应用
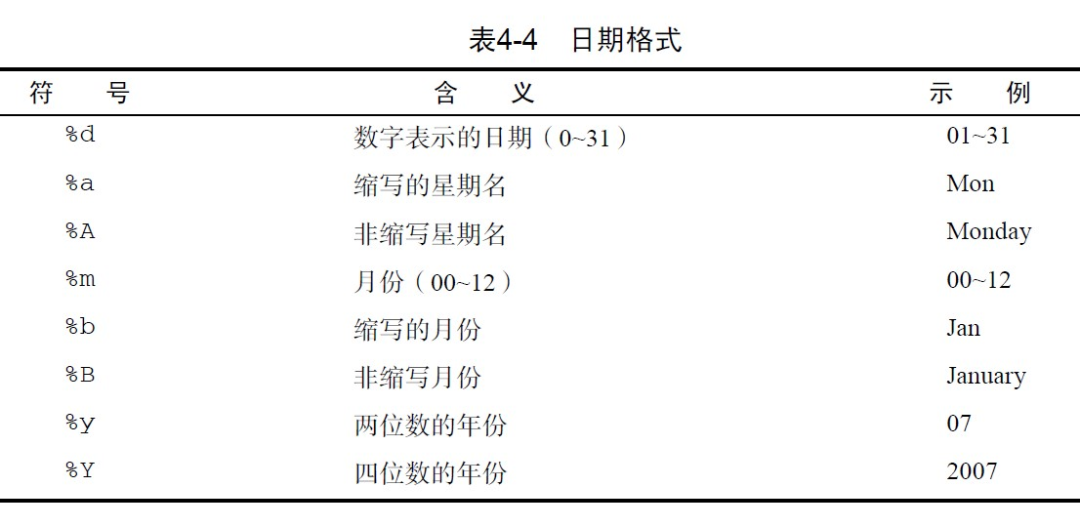
# 1. 时间数据处理的挑战与需求
在数据分析、数据挖掘、以及商业智能领域,时间数据处理是一个常见而复杂的任务。时间数据通常包含日期、时间、时区等多个维度,这使得准确、高效地处理时间数据显得尤为重要。当前,时间数据处理面临的主要挑战包括但不限于:不同时间格式的解析、时区的准确转换、时间序列的计算、以及时间数据的准确可视化展示。
为应对这些挑战,数据处理工作需要满足以下需求:
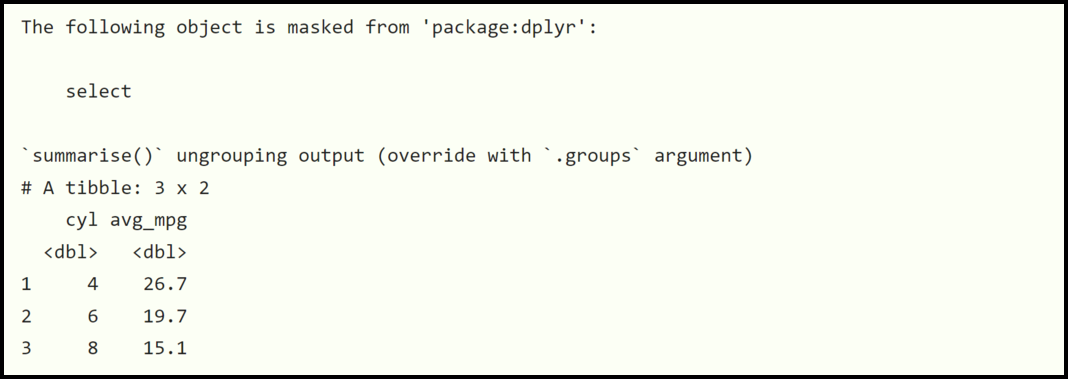
R语言数据透视表创建与应用:dplyr包在数据可视化中的角色

# 1. dplyr包与数据透视表基础
在数据分析领域,dplyr包是R语言中最流行的工具之一,它提供了一系列易于理解和使用的函数,用于数据的清洗、转换、操作和汇总。数据透视表是数据分析中的一个重要工具,它允许用户从不同角度汇总数据,快速生成各种统计报表。
数据透视表能够将长格式数据(记录式数据)转换为宽格式数据(分析表形式),从而便于进行
从数据到洞察:R语言文本挖掘与stringr包的终极指南

# 1. 文本挖掘与R语言概述
文本挖掘是从大量文本数据中提取有用信息和知识的过程。借助文本挖掘,我们可以揭示隐藏在文本数据背后的信息结构,这对于理解用户行为、市场趋势和社交网络情绪等至关重要。R语言是一个广泛应用于统计分析和数据科学的语言,它在文本挖掘领域也展现出强大的功能。R语言拥有众多的包,能够帮助数据科学
R语言复杂数据管道构建:plyr包的进阶应用指南

# 1. R语言与数据管道简介
在数据分析的世界中,数据管道的概念对于理解和操作数据流至关重要。数据管道可以被看作是数据从输入到输出的转换过程,其中每个步骤都对数据进行了一定的处理和转换。R语言,作为一种广泛使用的统计计算和图形工具,完美支持了数据管道的设计和实现。
R语言中的数据管道通常通过特定的函数来实现
【R语言数据包mlr的深度学习入门】:构建神经网络模型的创新途径
# 1. R语言和mlr包的简介
## 简述R语言
R语言是一种用于统计分析和图形表示的编程语言,广泛应用于数据分析、机器学习、数据挖掘等领域。由于其灵活性和强大的社区支持,R已经成为数据科学家和统计学家不可或缺的工具之一。
## mlr包的引入
mlr是R语言中的一个高性能的机器学习包,它提供了一个统一的接口来使用各种机器学习算法。这极大地简化了模型的选择、训练
【R语言MCMC探索性数据分析】:方法论与实例研究,贝叶斯统计新工具
# 1. MCMC方法论基础与R语言概述
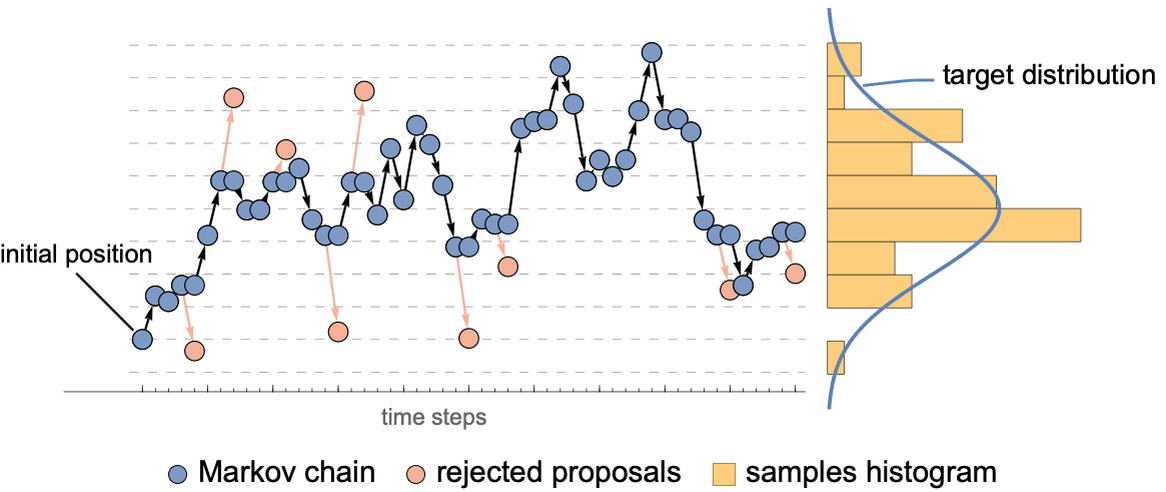
## 1.1 MCMC方法论简介
**MCMC (Markov Chain Monte Carlo)** 方法是一种基于马尔可夫链的随机模拟技术,用于复杂概率模型的数值计算,特别适用于后验分布的采样。MCMC通过构建一个马尔可夫链,
【R语言高级技巧】:data.table包的进阶应用指南
# 1. data.table包概述与基础操作
## 1.1 data.table包简介
data.table是R语言中一个强大的包,用于高效数据处理和分析。它以`data.table`对象的形式扩展了数据框(`data.frame`)的功能,提供了更快的数据读写速度,更节省内存的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )