MATLAB求导数实战指南:轻松征服微积分挑战
发布时间: 2024-06-08 14:59:49 阅读量: 119 订阅数: 42 

matlab实用指南
# 1. MATLAB求导数理论基础
**1.1 求导数的概念**
求导数是微积分中的一个基本概念,它描述了函数在某一点的变化率。对于一个函数 f(x),其导数 f'(x) 表示函数在 x 处的瞬时变化率。
**1.2 求导数的几何意义**
导数的几何意义是函数图像在 x 处的切线斜率。切线斜率表示函数在该点变化的速度和方向。
# 2. MATLAB求导数函数解析
### 2.1 常用求导函数及其语法
MATLAB提供了多种求导函数,每个函数都有其特定的语法和应用场景。下面介绍三种常用的求导函数:
#### 2.1.1 diff()函数
**语法:**
```
y = diff(x)
```
**参数说明:**
* `x`:输入向量或矩阵。
**功能:**
`diff()`函数计算相邻元素之间的差值。对于向量,它计算每个元素与后一个元素之间的差值。对于矩阵,它沿指定维度计算相邻元素之间的差值。
**代码示例:**
```
% 计算向量 [1, 2, 3, 4, 5] 的差值
x = [1, 2, 3, 4, 5];
y = diff(x);
% 计算矩阵 [1, 2; 3, 4] 沿行方向的差值
A = [1, 2; 3, 4];
y = diff(A, 1);
```
#### 2.1.2 gradient()函数
**语法:**
```
[dx, dy] = gradient(f, dx, dy)
```
**参数说明:**
* `f`:输入函数或矩阵。
* `dx`(可选):x 方向的步长(默认值为 1)。
* `dy`(可选):y 方向的步长(默认值为 1)。
**功能:**
`gradient()`函数计算给定函数或矩阵在指定步长下的梯度。对于标量函数,它返回梯度向量;对于向量函数,它返回雅可比矩阵。
**代码示例:**
```
% 计算函数 f(x, y) = x^2 + y^2 的梯度
f = @(x, y) x.^2 + y.^2;
[dx, dy] = gradient(f);
```
#### 2.1.3 symbolic()函数
**语法:**
```
x = symbolic('x');
y = symbolic('y');
```
**功能:**
`symbolic()`函数将变量声明为符号变量,允许进行符号计算。符号变量可以用于求解方程、化简表达式和计算导数。
**代码示例:**
```
% 声明 x 和 y 为符号变量
x = symbolic('x');
y = symbolic('y');
% 计算函数 f(x, y) = x^2 + y^2 的导数
df_dx = diff(x^2 + y^2, x);
df_dy = diff(x^2 + y^2, y);
```
# 3. MATLAB求导数实践应用
### 3.1 一元函数求导
#### 3.1.1 多项式函数求导
**语法:**
```
dydx = diff(p)
```
**参数说明:**
- `p`:多项式函数的系数向量,按降幂排列。
**代码块:**
```matlab
% 定义多项式函数
p = [1, 2, 3, 4];
% 求导
dydx = diff(p);
% 输出导数
disp("导数:");
disp(dydx);
```
**逻辑分析:**
`diff()` 函数对多项式函数的系数向量进行求导,返回导数的系数向量。
#### 3.1.2 三角函数求导
**语法:**
```
dydx = gradient(f)
```
**参数说明:**
- `f`:三角函数表达式。
**代码块:**
```matlab
% 定义三角函数
f = @(x) sin(x) + cos(x);
% 求导
dydx = gradient(f);
% 输出导数
disp("导数:");
disp(dydx);
```
**逻辑分析:**
`gradient()` 函数对三角函数表达式进行求导,返回导数的表达式。
### 3.2 多元函数求导
#### 3.2.1 隐函数求导
**语法:**
```
syms x y;
eq = x^2 + y^2 - 1;
dydx = solve(diff(eq, x), y);
```
**参数说明:**
- `x` 和 `y`:隐函数的变量。
- `eq`:隐函数方程。
**代码块:**
```matlab
% 定义隐函数方程
syms x y;
eq = x^2 + y^2 - 1;
% 求导
dydx = solve(diff(eq, x), y);
% 输出导数
disp("导数:");
disp(dydx);
```
**逻辑分析:**
`solve()` 函数求解隐函数方程的导数,返回导数的表达式。
#### 3.2.2 偏导数求解
**语法:**
```
[fx, fy] = gradient(f, x, y);
```
**参数说明:**
- `f`:多元函数表达式。
- `x` 和 `y`:多元函数的变量。
**代码块:**
```matlab
% 定义多元函数
f = @(x, y) x^2 + y^2;
% 求偏导数
[fx, fy] = gradient(f, x, y);
% 输出偏导数
disp("偏导数:");
disp(["fx: ", fx]);
disp(["fy: ", fy]);
```
**逻辑分析:**
`gradient()` 函数对多元函数表达式求偏导数,返回偏导数的表达式。
# 4. MATLAB求导数进阶技巧
### 4.1 数值求导
数值求导是一种近似求导的方法,它通过计算函数在特定点附近的有限差分来估计导数。MATLAB中提供了两种常用的数值求导方法:有限差分法和中心差分法。
#### 4.1.1 有限差分法
有限差分法使用以下公式计算导数:
```
f'(x) ≈ (f(x + h) - f(x)) / h
```
其中:
* `f(x)` 是函数在点 `x` 的值
* `h` 是步长
`h` 的值越小,近似值就越准确,但计算成本也越高。
```
% 定义函数
f = @(x) x^3 - 2*x^2 + 1;
% 使用有限差分法求导
h = 0.01;
x = 1;
df_dx = (f(x + h) - f(x)) / h;
fprintf('在 x = 1 处使用有限差分法求导数:%.4f\n', df_dx);
```
### 4.2 符号求导
符号求导是一种使用符号数学工具箱求解导数的精确方法。MATLAB中提供了 `Symbolic Math Toolbox`,它可以解析地求解符号表达式的导数。
#### 4.2.1 Symbolic Math Toolbox
`Symbolic Math Toolbox` 提供了 `diff()` 函数,用于计算符号表达式的导数。
```
% 定义符号变量
syms x;
% 定义函数
f = x^3 - 2*x^2 + 1;
% 使用 Symbolic Math Toolbox 求导
df_dx = diff(f, x);
fprintf('在 x = 1 处使用 Symbolic Math Toolbox 求导数:%s\n', char(df_dx));
```
#### 4.2.2 手动符号求导
也可以手动应用求导规则来计算符号表达式的导数。
```
% 定义函数
f = x^3 - 2*x^2 + 1;
% 手动求导
df_dx = 3*x^2 - 4*x;
fprintf('在 x = 1 处手动求导数:%s\n', char(df_dx));
```
# 5. MATLAB求导数应用案例
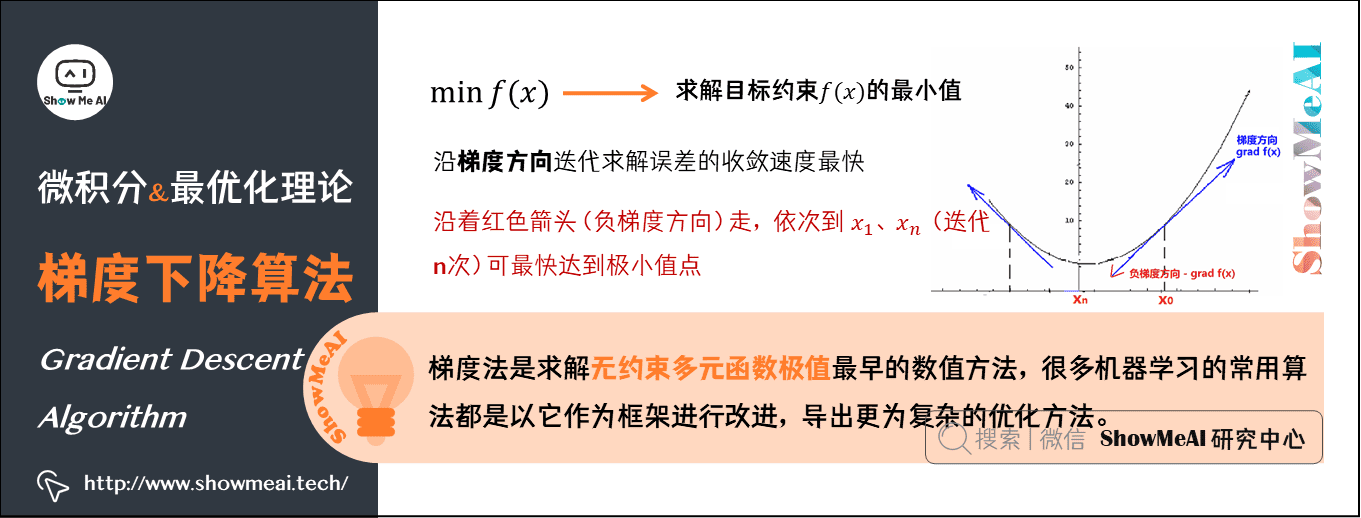
### 5.1 函数极值点求解
求导数的一个重要应用是求解函数的极值点。极值点是指函数在某一点处达到最大值或最小值。在MATLAB中,可以使用求导数来求解一元函数和多元函数的极值点。
#### 5.1.1 一元函数极值点
对于一元函数,极值点可以通过求导数并寻找导数为零的点来求解。MATLAB中可以使用`fzero`函数来求解一元函数的根,从而找到导数为零的点。
```matlab
% 定义一元函数
f = @(x) x^3 - 3*x^2 + 2*x + 1;
% 求导数
df = @(x) 3*x^2 - 6*x + 2;
% 求解极值点
x_min = fzero(df, -1);
x_max = fzero(df, 1);
% 计算极值
f_min = f(x_min);
f_max = f(x_max);
% 输出结果
disp(['极小值点:', num2str(x_min), ', 极小值:', num2str(f_min)]);
disp(['极大值点:', num2str(x_max), ', 极大值:', num2str(f_max)]);
```
#### 5.1.2 多元函数极值点
对于多元函数,极值点可以通过求偏导数并寻找偏导数都为零的点来求解。MATLAB中可以使用`fsolve`函数来求解多元函数的根,从而找到偏导数都为零的点。
```matlab
% 定义多元函数
f = @(x, y) x^2 + y^2 - 2*x - 4*y + 5;
% 求偏导数
df_dx = @(x, y) 2*x - 2;
df_dy = @(x, y) 2*y - 4;
% 求解极值点
x0 = 1;
y0 = 2;
options = optimset('Display', 'off');
[x_opt, y_opt] = fsolve(@(z) [df_dx(z(1), z(2)); df_dy(z(1), z(2))], [x0; y0], options);
% 计算极值
f_opt = f(x_opt, y_opt);
% 输出结果
disp(['极值点:(', num2str(x_opt), ', ', num2str(y_opt), '), 极值:', num2str(f_opt)]);
```
### 5.2 函数图像绘制
求导数还可以用于绘制函数图像和绘制切线和法线。
#### 5.2.1 函数图像绘制
```matlab
% 定义函数
f = @(x) x^3 - 3*x^2 + 2*x + 1;
% 定义绘制范围
x_min = -5;
x_max = 5;
x = linspace(x_min, x_max, 100);
% 计算函数值
y = f(x);
% 绘制函数图像
plot(x, y, 'b-', 'LineWidth', 2);
xlabel('x');
ylabel('y');
title('函数图像');
```
#### 5.2.2 切线和法线的绘制
```matlab
% 定义函数
f = @(x) x^3 - 3*x^2 + 2*x + 1;
% 定义求导函数
df = @(x) 3*x^2 - 6*x + 2;
% 定义绘制点
x0 = 1;
y0 = f(x0);
% 计算切线和法线的斜率
m_tangent = df(x0);
m_normal = -1/m_tangent;
% 计算切线和法线上的点
x1 = x0 + 1;
y1 = y0 + m_tangent;
x2 = x0 + 1;
y2 = y0 + m_normal;
% 绘制函数图像、切线和法线
x = linspace(x_min, x_max, 100);
y = f(x);
plot(x, y, 'b-', 'LineWidth', 2);
hold on;
plot([x0, x1], [y0, y1], 'r--', 'LineWidth', 1);
plot([x0, x2], [y0, y2], 'g--', 'LineWidth', 1);
xlabel('x');
ylabel('y');
title('函数图像、切线和法线');
legend('函数图像', '切线', '法线');
```
# 6. MATLAB求导数常见问题解答
### 6.1 求导数时遇到的错误
#### 6.1.1 符号求导错误
**问题:**在使用`symbolic`函数进行符号求导时,出现错误提示“无法求导”。
**原因:**
* 输入表达式包含不支持求导的函数或运算符。
* 输入表达式存在语法错误。
* 输入表达式过于复杂,符号求导器无法处理。
**解决方案:**
* 检查输入表达式中是否有不支持求导的函数或运算符。
* 仔细检查表达式是否存在语法错误。
* 尝试将表达式分解为更简单的部分,逐个求导。
#### 6.1.2 数值求导误差
**问题:**使用数值求导方法时,求导结果与解析结果存在较大误差。
**原因:**
* 步长太大,导致近似误差。
* 函数在求导点附近变化剧烈,导致有限差分法不准确。
**解决方案:**
* 减小步长,提高近似精度。
* 尝试使用其他数值求导方法,如中心差分法。
### 6.2 求导数性能优化
#### 6.2.1 避免重复计算
**问题:**在求导多个函数时,重复计算相同的导数。
**原因:**
* 未缓存导数结果。
**解决方案:**
* 使用缓存机制存储已计算的导数结果。
* 在求导多个函数时,使用相同的变量名存储导数,避免重复计算。
#### 6.2.2 使用并行计算
**问题:**求导计算量大,导致程序运行缓慢。
**原因:**
* 求导任务可以并行化。
**解决方案:**
* 使用并行计算工具箱(Parallel Computing Toolbox)将求导任务分配到多个处理器上。
* 优化并行代码,减少通信开销。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到《MATLAB求导数宝典》,一本掌握微积分利器的终极指南。在这里,您将揭秘MATLAB求导数的秘诀,解锁数学难题的解决方案。从实战指南到进阶之道,我们将深入探索微积分在科学、工程、图像处理、信号处理、机器学习、金融建模、物理建模、生物建模、化学建模、经济建模、社会科学建模、医学建模、材料科学建模、能源建模、交通建模和制造建模中的妙用。掌握MATLAB求导数,您将优化算法、提升效率、分析图像特征、提取信号信息、优化模型、预测市场趋势、模拟物理现象、探索生命系统、解析化学反应、分析经济趋势、理解社会现象、模拟生理过程、探索材料特性、优化能源利用、分析交通流和优化生产流程。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
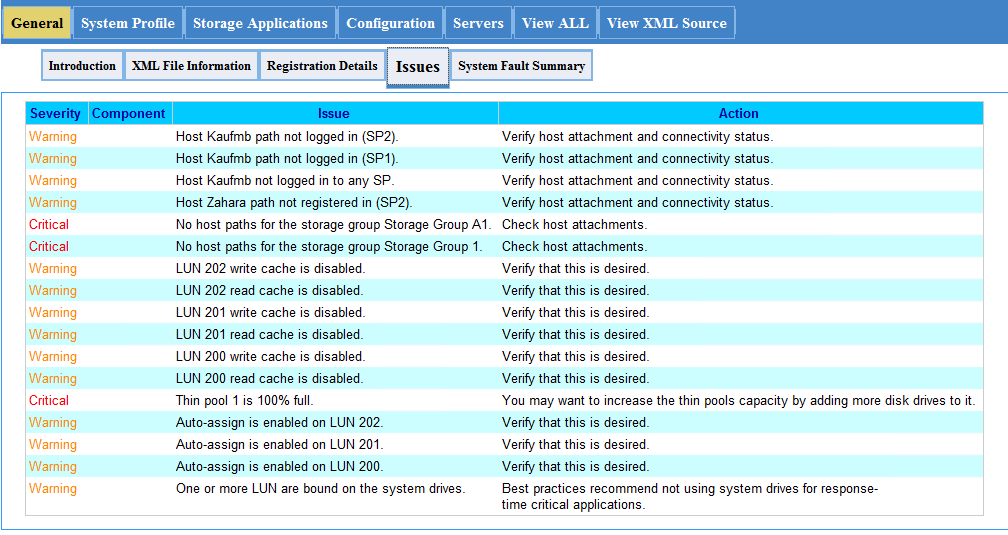
从停机到上线,EMC VNX5100控制器SP更换的实战演练
# 摘要
本文详细介绍了EMC VNX5100控制器的更换流程、故障诊断、停机保护、系统恢复以及长期监控与预防性维护策略。通过细致的准备工作、详尽的风险评估以及备份策略的制定,确保控制器更换过程的安全性与数据的完整性。文中还阐述了硬件故障诊断方法、系统停机计划的制定以及数据保护步骤。更换操作指南和系统重启初始化配置得到了详尽说明,以确保系统功能的正常恢复与性能优化。最后,文章强调了性能测试
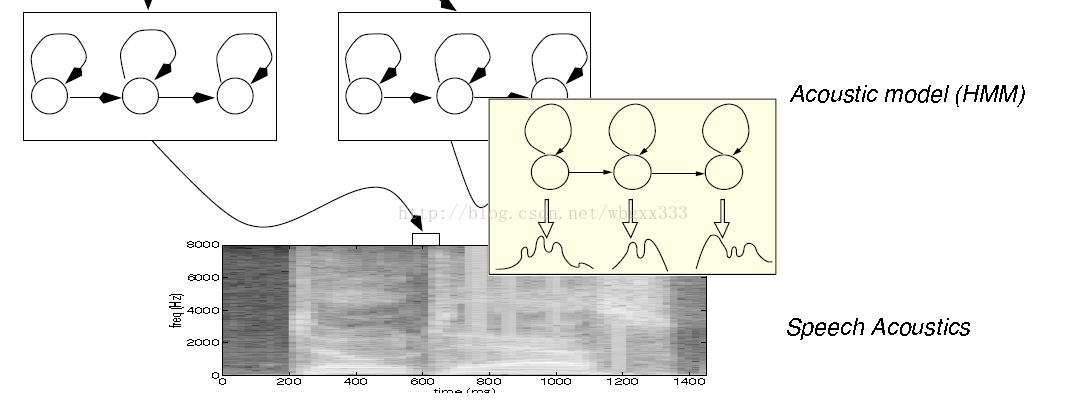
【科大讯飞官方指南】:语音识别集成与优化的终极解决方案
# 摘要
本文综述了语音识别技术的当前发展概况,深入探讨了科大讯飞语音识别API的架构、功能及高级集成技术。文章详细分析了不同应用场景下语音识别的应用实践,包括智能家居、移动应用和企业级
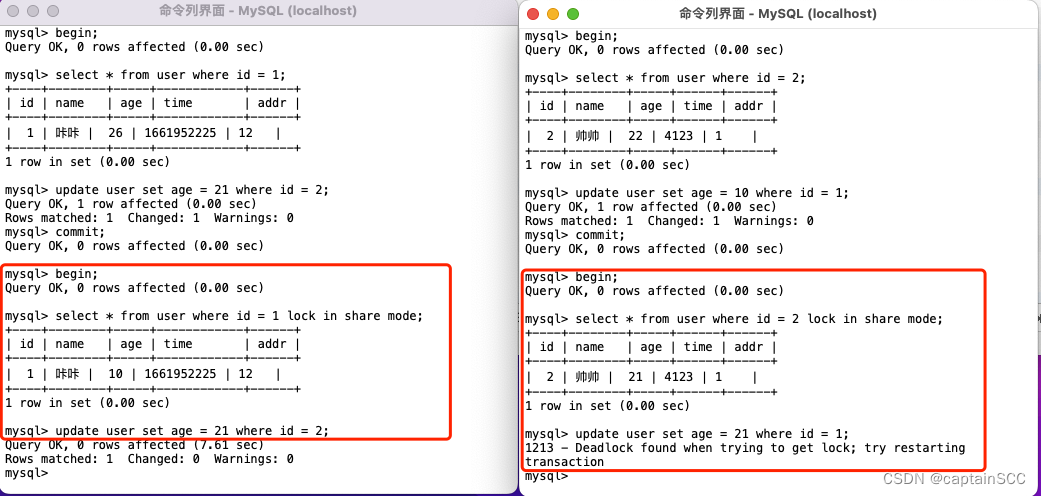
彻底解决MySQL表锁问题:专家教你如何应对表锁困扰
# 摘要
本文深入探讨了MySQL数据库中表锁的原理、问题及其影响。文章从基础知识开始,详细分析了表锁的定义、类型及其与行锁的区别。理论分析章节深入挖掘了表锁产生的原因,包括SQL编程习惯、数据库设计和事务处理,以及系统资源和并发控制问题。性能影响部分讨论了表锁对查询速度和事务处理的潜在负面效果。诊断与排查章节提供了表锁监控和分析工具的使用方法,以及实际监控和调试技巧。随后,本文介绍了避免和解决表锁问题
【双色球数据清洗】:掌握这3个步骤,数据准备不再是障碍
# 摘要
双色球数据清洗作为保证数据分析准确性的关键环节,涉及数据收集、预处理、实践应用及进阶技术等多方面内容。本文首先概述了双色球数据清洗的重要性,并详细解析
【SketchUp脚本编写】

# 摘要
随着三维建模需求的增长,SketchUp脚本编程因其自动化和高效性受到设计师的青睐。本文首先概述了SketchUp脚本编写的基础知识,包括脚本语言的基本概念、SketchUp API与命令操作、控制流与函数的使用。随后,深入探讨了脚本在建模自动化、材质与纹理处理、插件与扩展开发中的实际应用。文章还介绍了高级技巧,如数据交换、错误处理、性能优化
硬盘故障分析:西数硬盘检测工具在故障诊断中的应用(故障诊断的艺术与实践)
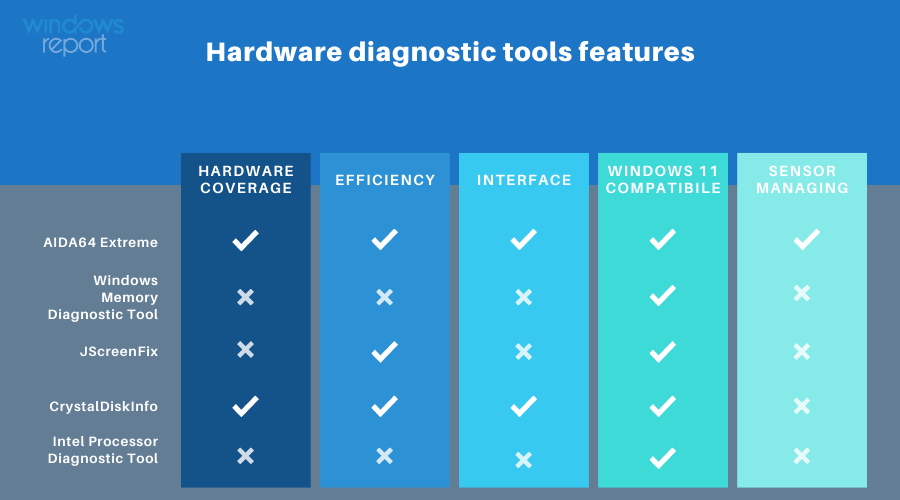
# 摘要
本文从硬盘故障的分析概述入手,系统地探讨了西数硬盘检测工具的选择、安装与配置,并深入分析了硬盘的工作原理及故障类型。在此基础上,本文详细阐述了故障诊断的理论基础和实践应用,包括常规状态检测、故障模拟与实战演练。此外,本文还提供了数据恢复与备份策略,以及硬盘故障处理的最佳实践和预防措施,旨在帮助读者全面理解和
关键参数设置大揭秘:DEH调节最佳实践与调优策略
# 摘要
本文系统地介绍了DEH调节技术的基本概念、理论基础、关键参数设置、实践应用、监测与分析工具,以及未来趋势和挑战。首先概述了DEH调节技术的含义和发展背景。随后深入探讨了DEH调节的原理、数学模型和性能指标,详细说明了DEH系统的工作机制以及控制理论在其中的应用。重点分析了DEH调节关键参数的配置、优化策略和异
【面向对象设计在软件管理中的应用】:原则与实践详解
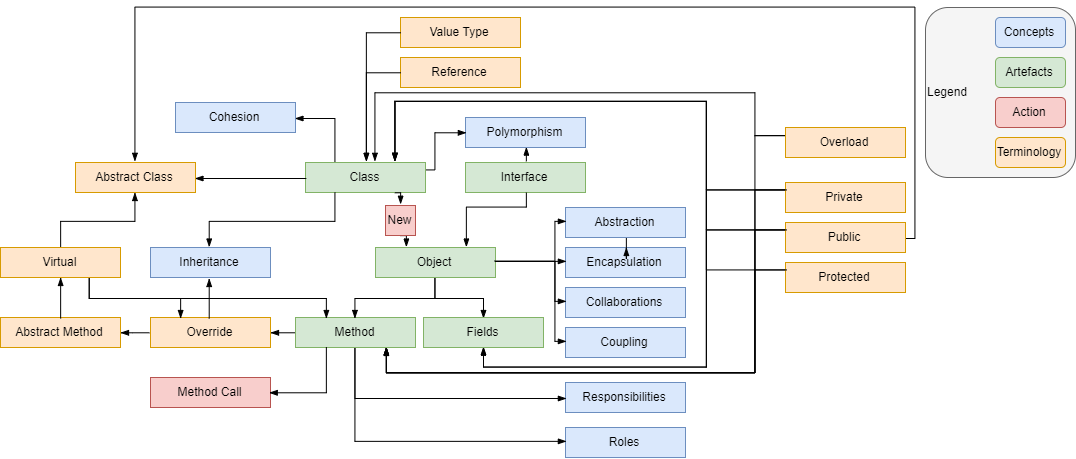
# 摘要
面向对象设计(OOD)是软件工程中的核心概念,它通过封装、继承和多态等特性,促进了代码的模块化和复用性,简化了系统维护,提高了软件质量。本文首先回顾了OOD的基本概念与原则,如单一职责原则(SRP)、开闭原则(OCP)、里氏替换原则(LSP)、依赖倒置原则(DIP)和接口隔离原则(ISP),并通过实际案例分析了这些原则的应用。接着,探讨了创建型、结构型和行为型设计模式在软件开发中的应用,以及面向对象设计
【AT32F435与AT32F437 GPIO应用】:深入理解与灵活运用

# 摘要
AT32F435/437微控制器作为一款广泛应用的高性能MCU,其GPIO(通用输入/输出端口)的功能对于嵌入式系统开发至关重要。本文旨在深入探讨GPIO的基础理论、配置方法、性能优化、实战技巧以及在特定功能中的应用,并提供故障诊断与排错的有效方法。通过详细的端口结构分析、寄存器操作指导和应用案例研究,
【sCMOS相机驱动电路信号同步处理技巧】:精确时间控制的高手方法
# 摘要
sCMOS相机作为高分辨率成像设备,在科学研究和工业领域中发挥着重要作用。本文首先概述了sCMOS相机驱动电路信号同步处理的基本概念与必要性,然后深入探讨了同步处理的理论基础,包括信号同步的定义、分类、精确时间控制理论以及时间延迟对信号完整性的影响。接着,文章进入技术实践部分,详细描述了驱动电路设计、同步信号生成控制以及
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )