三相异步电机不再神秘:深度解析工作原理及PLC控制
发布时间: 2024-12-23 12:59:41 阅读量: 12 订阅数: 7 

三相异步电动机点动继电控制电气原理图及梯形图

# 摘要
本文全面介绍了三相异步电机的基础知识、工作原理以及与PLC控制技术的结合实践。首先,文章概述了三相异步电机的结构组成及工作原理,包括定子和转子的设计、电磁感应、以及转矩与转速之间的关系。随后,深入探讨了PLC控制系统的基本理论、编程基础及其在电机控制中的应用。在此基础上,详细描述了实现PLC与三相异步电机控制接口的设计、控制程序的编写以及系统调试与故障诊断。最终,展望了智能化与网络化控制的未来趋势,包括智能控制技术的发展方向和智能工厂中的应用前景。本研究为电机控制领域的技术创新提供了理论支持和实践指导。
# 关键字
三相异步电机;电磁感应;PLC控制;系统调试;故障诊断;智能控制技术
参考资源链接:[PLC控制的三相异步电机正反转调速系统设计](https://wenku.csdn.net/doc/291c0svfag?spm=1055.2635.3001.10343)
# 1. 三相异步电机基础概述
## 1.1 三相异步电机简介
三相异步电机是工业中应用最为广泛的一种交流电动机。它利用三相交流电产生的旋转磁场与转子导体间的相对运动来实现能量转换。由于其结构简单、运行可靠、维护方便等特点,它在各个领域中发挥着重要作用。
## 1.2 三相异步电机的分类
按照转子的不同,三相异步电机可以分为鼠笼式和绕线式两种。鼠笼式电机转子简单,启动性能好,适用于固定负载的场合;绕线式电机转子有绕组,启动时可以外接电阻,适合于启动转矩大且启动频繁的场合。
## 1.3 三相异步电机的基本参数
三相异步电机的主要参数包括额定功率、额定电压、额定频率、极数、转速等。这些参数直接关系到电机的应用场合和性能,了解这些参数对电机的选择和使用至关重要。
# 2. 三相异步电机的工作原理
## 2.1 电机结构组成
### 2.1.1 定子部分的作用与构造
定子是三相异步电机中不转动的部分,为电机的主要支撑部件。它包括定子铁芯和绕组。定子铁芯由硅钢片叠压而成,其作用是提供一个闭合的磁路,以减少磁通通过时的损耗。绕组通常使用铜线绕制,埋设在铁芯的槽中,以形成三相绕组。三相电流通过这三相绕组时会产生旋转磁场,这是电机运行的基础。
定子的构造和设计对电机的性能有着决定性的影响,包括电机的尺寸、重量和效率。定子铁芯的槽型、线圈的匝数、绝缘等级等因素都需精心设计以满足不同应用的需求。
```mermaid
classDiagram
class Stator {
+StatorCore core
+Coils coils
+StatorSlot slots
+StatorWinding winding
}
class StatorCore {
+int thickness
+int layers
}
class Coils {
+int phaseCount
+int wireDiameter
}
class StatorSlot {
+int length
+int width
}
class StatorWinding {
+int turnsPerPhase
+int windingMethod
}
Stator <|-- StatorCore : has a
Stator <|-- Coils : has a
Stator <|-- StatorSlot : has
Stator <|-- StatorWinding : has a
```
### 2.1.2 转子部分的设计与功能
转子是电机中负责产生转矩的部分,位于定子内部,并可以自由旋转。它也由铁芯和绕组组成,但转子绕组的形式有多种,如鼠笼式和绕线式。鼠笼式转子由一系列金属条(通常为铜或铝)构成,这些条子通过两个端环连接形成闭合回路,当定子产生的旋转磁场穿过转子时,会在转子绕组中感应出电流,产生电磁力,从而驱动转子转动。绕线式转子则有自己的绕组,通过外接电阻或变频器可以调节转速。
转子设计必须兼顾机械强度、散热能力和电能转换效率。转子的重量、材料和绕组设计将影响电机的启动、运行特性及效率。
```mermaid
flowchart LR
subgraph Rotor
direction TB
rotorCore(Rotor Core)
rotorBars(Rotor Bars)
endRings(End Rings)
subgraph RotorWindings
cage["Cage (for Squirrel-Cage Induction Motors)"]
wound["Wound (for Wound Rotor Motors)"]
end
end
rotorCore --> rotorBars
rotorBars --> endRings
endRings --> cage & wound
```
## 2.2 电磁感应与旋转机制
### 2.2.1 电磁感应原理简介
电磁感应是电机工作的物理基础。当电流通过导体时,会在导体周围产生磁场。如果导体在磁场中移动,或者磁场在导体周围变化,则导体中会产生感应电流,这就是法拉第电磁感应定律。在三相异步电机中,通过向定子绕组通以三相交流电,产生的交变磁场在转子中感应出电流,进而产生电磁转矩。
### 2.2.2 旋转磁场的产生及其对转子的作用
三相电流具有相位差,使得通过定子绕组的电流产生时序上的变化。这种时序上的变化会在定子内产生一个旋转磁场。旋转磁场以同步速度沿着定子内部空间旋转,转子被感应出电流,和旋转磁场相互作用产生电磁转矩,使得转子跟随旋转磁场以接近同步速度旋转。
同步速度是指旋转磁场的速度,由公式 n = 60f/p 计算,其中 f 是电源频率,p 是极对数。转子的实际速度略低于同步速度,这个速度差称为滑差。
### 2.2.3 转矩与转速的形成关系
转矩是电机旋转的动力,转速则是电机旋转的快慢。电磁转矩是由于电磁感应产生在转子上的力矩。转矩与转子电流、转子磁场强度及定转子间的相对速度有关。当电机负载变化时,滑差随之变化,转矩也会发生变化以适应负载要求。
转速与转矩之间存在非线性关系,通常在电机设计和选型时需依据工作特性曲线选择合适的电机以满足实际工况。转速会随着转矩的增加而略有下降,这是由于转子的滑差增加所导致的。
## 2.3 运行特性与效率分析
### 2.3.1 启动过程及其特性
三相异步电机的启动过程是其工作循环的开始,启动特性是指电机从静止状态到达额定转速的过程。启动时,转子与旋转磁场的相对速度最大,感应电流也最大,电机的启动转矩也达到最大。但是过大的启动电流会对电网造成冲击,因此通常采用降压启动或者软启动方法来减少启动电流,保护电机和电网。
### 2.3.2 负载变化对电机性能的影响
在实际工作过程中,负载的变化会影响电机的转速、电流和效率。负载增加时,电机转速会轻微下降,转矩和电流则相应增加。过载时,电机可能会因过热而损坏。因此,选择适当的电机和设计合理的控制策略对于保护电机和提高其运行效率至关重要。
### 2.3.3 能效评估与优化方法
电机的能效评估主要是指评价电机在不同工况下的能量转换效率。能效高的电机能够以较低的能耗实现更高的输出功率。提高能效的方法很多,包括优化电机设计、采用先进的材料、改进制造工艺等。此外,通过合理的控制策略,如变频调速技术,可以在保证输出功率的同时降低能耗。
电机的优化可以从减少损耗入手,如铁损和铜损。在运行中,监控电机的温度、振动和电流等参数可以帮助及时发现电机的异常,避免效率下降,延长电机寿命。
# 3. PLC控制技术基础
## 3.1 PLC控制系统概述
### 3.1.1 PLC的定义与发展历史
可编程逻辑控制器(Programmable Logic Controller, PLC)是一种专为工业应用设计的电子计算设备,主要用来控制机械和过程。PLC具有高可靠性、高灵活性、易编程和易维护等特性,被广泛应用于各行各业的自动化控制领域。
PLC的早期形态可追溯到上世纪中叶,最初由汽车行业提出,目的是取代传统的继电器控制系统,随着技术的发展,PLC逐渐集成了更多的功能,例如模拟输入输出、PID控制、通讯能力等。PLC的发展史同时也是一部自动化和数字化控制的发展史,它的成长与应用领域紧密相连。
### 3.1.2 PLC的工作原理和系统构成
PLC的基本工作原理是周期性地扫描用户程序,并根据输入信号的状态和程序逻辑进行运算处理,最后输出控制信号以驱动相应的设备。PLC系统主要由输入/输出(I/O)模块、中央处理单元(CPU)、存储器和通讯接口等部分组成。I/O模块负责连接外部设备,如传感器、执行器等。CPU进行程序的处理和运算。存储器存储用户程序和数据。通讯接口用于与其他设备进行数据交换。
### 3.1.3 PLC的编程基础
#### 3.1.3.1 PLC编程语言与指令集
PLC支持多种编程语言,包括梯形图(Ladder Diagram)、功能块图(Function Block Diagram)、指令表(Instruction List)、结构化文本(Structured Text)和顺序功能图(Sequential Function Chart)。其中,梯形图是最常用的图形化编程语言,它模仿电气控制原理图,直观易懂,方便电气工程师使用。
PLC的指令集包含一系列的编程元素,如定时器(T)、计数器(C)、比较器和算术指令等。编程时,工程师会根据控制需求选取相应的指令,构建控制逻辑。
#### 3.1.3.2 基本逻辑控制的实现方法
基本逻辑控制包括顺序控制、条件控制、计数控制和定时控制等。例如,一个简单的顺序控制可以通过编程实现流水灯的逻辑,条件控制可以用于安全门的开关控制,计数控制在包装流程中计数产品数量,定时控制则可以应用于定时启动或停止某个设备。
### 3.1.3 PLC在电机控制中的应用
#### 3.1.3.1 电机启动与停止控制
在电机控制中,PLC可以用来控制电机的启动和停止。通过编程,当系统发出启动命令时,PLC会输出一个信号至接触器,使得电机得以接入电网并开始工作;当需要停止电机时,PLC再发出停止信号,断开电机电路,实现安全控制。
下面是一个简单的梯形图示例,用于控制电机的启动和停止逻辑:
```plaintext
+----[/]----[/]----( )----+
| Start Stop M |
+----[ ]------------------+
| M |
+-------------------------+
```
其中,"Start"按钮、"Stop"按钮和"M"接触器的线圈分别对应启动、停止按钮和电机接触器。当按下"Start"按钮且"Stop"按钮未被按下时,电机接触器的线圈得到激励,电机启动。当按下"Stop"按钮时,电机接触器线圈断电,电机停止。
#### 3.1.3.2 速度调节与保护机制
在需要对电机速度进行调节的情况下,可以通过变频器(VFD)来改变电机供电频率,而PLC则负责提供给变频器一个可调的模拟信号来控制电机的运行速度。同时,PLC还能实现对电机的保护机制,例如过载保护、短路保护等。
在下面的示例中,PLC与变频器配合使用,通过改变输出模拟信号的值来调节电机的速度:
```plaintext
+----[ ]----( )----+
| Start Speed |
| Command |
+----[/]----( )----+
| Stop |
+------------------+
```
这里,"Start Command"是一个模拟输出信号,它控制变频器的输出频率,从而改变电机的速度。"Stop"按钮用于切断信号,停止电机。
在电机保护方面,PLC会实时监控电机运行状态,并在出现异常时(如电流过大、过热等),及时切断电源,以保护电机不受损害。
在本章节中,我们介绍了PLC控制系统的基础知识,包括其定义、发展历史、工作原理、编程语言和电机控制应用。下一章我们将深入探讨如何将PLC技术应用于三相异步电机的控制中,以及具体的设计和实现方法。
# 4. 三相异步电机的PLC控制实践
## 4.1 PLC与电机控制接口
### 4.1.1 输入输出模块的配置与接线
在实际应用中,PLC与电机之间的接口通常包括输入模块和输出模块,它们通过一系列的接线实现控制信号的传递。了解并正确配置这些模块是实现有效控制的前提。输入模块负责接收来自现场的信号,如传感器信号、操作面板按钮信号等,而输出模块则将PLC的控制信号传递给电机相关的执行元件,如接触器、继电器等。
#### 4.1.1.1 输入模块配置
输入模块是PLC接收外部信号的端口,通常包含数字量输入和模拟量输入两种类型。数字量输入模块用于接收如按钮、限位开关等开关量信号。在配置输入模块时,需要考虑信号的电压类型(直流或交流)、电压级别(通常为24Vdc或110/220Vac)以及信号的逻辑电平(高电平或低电平)。
#### 4.1.1.2 输出模块配置
输出模块分为数字量输出和模拟量输出。数字量输出模块主要用于控制接触器、继电器等,而模拟量输出则用于提供连续的控制信号,如调节变频器的频率。在配置输出模块时,需要考虑控制电路的电压和电流要求,以及PLC的输出类型是否满足外部执行元件的规格。
#### 4.1.1.3 接线操作
接线操作是将输入输出模块与外部设备相连的过程。正确的接线对于系统的安全和可靠性至关重要。一般在接线前应关闭电源,以免发生电击或短路。接线时要注意信号线与电源线隔离,避免干扰,并确保所有接点接触良好,无松动或腐蚀现象。
```plaintext
注意:本章节不包含示例代码块,因为所讨论内容为电气接线配置,不适合用代码表示。
```
### 4.1.2 传感器与执行器的选择与应用
在PLC控制系统中,传感器用于检测电机状态或外部环境条件,而执行器则根据PLC的指令执行相应的动作。选择合适的传感器和执行器对于整个系统的性能至关重要。
#### 4.1.2.1 传感器的选择与应用
传感器种类繁多,包括但不限于位置传感器、速度传感器、温度传感器等。选择传感器时需要考虑其测量范围、精度、响应时间以及与PLC的兼容性。例如,旋转编码器可以用于测量电机的转速和位置信息。
#### 4.1.2.2 执行器的选择与应用
执行器包括接触器、继电器、电磁阀等。在电机控制系统中,接触器是常用的执行器,用于实现电机的启动和停止。选择执行器时需考虑其额定电流、电压以及动作频率是否满足控制要求。
```plaintext
注意:本章节不包含示例代码块,因为所讨论内容为电气元件的选择,不适合用代码表示。
```
## 4.2 PLC控制程序的设计与实现
### 4.2.1 编写控制逻辑的步骤与技巧
编写PLC控制逻辑是为了实现对电机的精确控制。设计一个良好的控制逻辑需要遵循一定的步骤和掌握一些技巧。
#### 4.2.1.1 确定控制要求
在编写控制逻辑之前,首先需要明确控制目标。例如,控制电机的启动、停止、速度调节、故障保护等。详细了解系统的输入输出条件,并将它们转化为PLC可识别的信号。
#### 4.2.1.2 设计控制流程图
根据控制要求设计控制流程图,它可以帮助理解系统的控制逻辑。流程图通常包括输入信号处理、控制决策、输出信号控制等环节。在设计流程图时,应采用标准的符号表示,例如使用mermaid格式流程图。
```mermaid
graph LR
A[开始] --> B[检查输入信号]
B --> C{判断条件}
C -->|条件1| D[执行动作1]
C -->|条件2| E[执行动作2]
D --> F[等待下一次循环]
E --> F[等待下一次循环]
```
#### 4.2.1.3 编写PLC程序
编写PLC程序通常使用梯形图、指令表或结构化文本等编程语言。编写时应注意使用合适的指令集,并遵循编程规范,如合理使用注释,以便其他工程师理解。
```plaintext
注意:本章节不包含实际的PLC编程代码块,因为所讨论内容为控制逻辑设计步骤,适用于多种编程语言与平台。
```
### 4.2.2 案例分析:实现复杂的电机控制逻辑
案例分析可以帮助理解如何将理论应用到实际中。在此,我们探讨一个复杂的电机控制逻辑的实现,例如一个具有启停控制、速度调节以及故障检测功能的系统。
#### 4.2.2.1 系统需求
- 实现电机的远程启动与停止。
- 根据外部信号调节电机的速度。
- 当电机过载或出现故障时,能够自动切断电源并给出报警信号。
#### 4.2.2.2 控制逻辑实现
- 利用输入模块接收启动与停止按钮信号。
- 通过模拟量输入接收外部速度调节信号。
- 使用过载保护传感器检测电机工作状态。
```plaintext
注意:本章节不包含示例代码块,因为所讨论内容为系统需求分析,不适合用代码表示。
```
## 4.3 系统调试与故障诊断
### 4.3.1 PLC控制系统的调试流程
调试是确保PLC控制程序按预期运行的重要步骤。调试过程包括程序测试、系统验证和性能优化。
#### 4.3.1.1 程序测试
在程序完成编写后,首先进行单元测试,检查每个控制模块的功能是否正确。然后进行集成测试,确保各个模块协同工作无误。
#### 4.3.1.2 系统验证
将PLC系统连接到实际的电机和传感器上,运行控制程序,并监视电机的响应是否符合预期。这通常涉及到对电机运行参数的监控和调整。
#### 4.3.1.3 性能优化
通过记录和分析系统的运行数据,找出潜在的性能瓶颈和不稳定的因素,对控制逻辑进行调整和优化。
```plaintext
注意:本章节不包含示例代码块,因为所讨论内容为调试流程,不适合用代码表示。
```
### 4.3.2 常见故障分析与处理方法
在运行过程中,PLC控制系统可能会出现各种故障。分析故障原因并采取相应措施是确保系统稳定运行的关键。
#### 4.3.2.1 通信故障
通信故障可能是由于信号干扰、接线错误或设备故障引起的。需要检查通信线路和接头,并使用故障诊断工具进行问题定位。
#### 4.3.2.2 逻辑错误
逻辑错误通常是由于程序设计不当引起的。需要仔细检查程序代码,进行逻辑分析,并与控制流程图对比,找出问题所在。
#### 4.3.2.3 硬件故障
硬件故障可能是由于PLC模块损坏、传感器失效或执行器不工作等原因造成的。应对硬件设备进行检查和替换。
```plaintext
注意:本章节不包含示例代码块,因为所讨论内容为故障分析与处理,不适合用代码表示。
```
通过本章节的介绍,读者应掌握如何将PLC控制系统应用于三相异步电机的控制,包括硬件配置、程序设计、调试以及故障排除等方面的知识。这为实现复杂的电机控制提供了坚实的基础,并为今后的智能化和网络化控制奠定了基础。
# 5. 未来展望:智能化与网络化控制
在当代工业自动化领域,智能化和网络化已经成为推动技术进步的两大驱动力。三相异步电机控制系统同样面临这样的发展趋势。本章将探讨智能化技术的发展趋势及其在电机控制中的应用案例和前景。
## 5.1 智能控制技术的发展趋势
### 5.1.1 电机控制的智能化方向
随着人工智能和机器学习技术的不断进步,电机控制系统正逐步向更加智能化的方向发展。智能化控制不仅能够提高电机的运行效率,还能实现更加复杂和精确的控制。
一个典型的例子是预测性维护(Predictive Maintenance),通过实时监控电机的运行参数,并利用大数据分析和机器学习算法预测潜在的故障,从而在问题发生之前进行维护,减少意外停机时间。
此外,模糊逻辑控制和神经网络控制等智能算法的应用,使得电机控制系统能够处理更多不确定性和复杂性,适应更为多变的工作环境。
### 5.1.2 工业物联网与电机控制的融合
工业物联网(Industrial Internet of Things, IIoT)技术的发展,为电机控制带来了全新的视角。通过将传感器、控制器和网络设备的融合,实现对电机的实时监控和远程控制,提高了生产的灵活性和效率。
在这样一个网络化的环境中,电机不再是一个简单的执行单元,而是变成了可以与其它设备和系统交互的智能节点。通过数据的采集与分析,电机的运行状态可以被实时监控,效率可以被进一步优化。
## 5.2 智能化控制案例与应用前景
### 5.2.1 智能工厂中的电机控制实例
在智能工厂中,三相异步电机作为自动化生产线的关键组成部分,其智能化控制得到了广泛应用。例如,使用传感器和执行器对电机进行实时监控,通过PLC收集数据并使用边缘计算进行初步分析,再将分析结果传送到云平台进行深入处理。
这不仅提高了生产线的智能化程度,还能够实时优化电机的工作状态,达到节能降耗的目的。这种集成化的解决方案使得电机控制更加智能和灵活,满足了现代工业对自动化和高效率的严格要求。
### 5.2.2 预测性维护与能效管理展望
预测性维护和能效管理是电机控制智能化的两大应用前景。通过集成先进的传感器技术、无线通讯技术和大数据分析平台,电机控制系统可以实现对电机运行状态的全面监测。
这不仅可以减少意外停机的风险,还可以通过分析电机的功耗数据,进行能源管理,从而实现节能减排。智能化的电机控制系统不仅可以降低企业的运维成本,还可以提高企业的社会责任感,促进可持续发展。
未来,智能化和网络化控制将成为三相异步电机控制的重要发展趋势。随着技术的不断进步和应用的不断深入,电机控制系统将在智能化的道路上越走越远,为企业提供更为高效、智能和可靠的电机控制解决方案。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
电力电子初学者必看:Simplorer带你从零开始精通IGBT应用
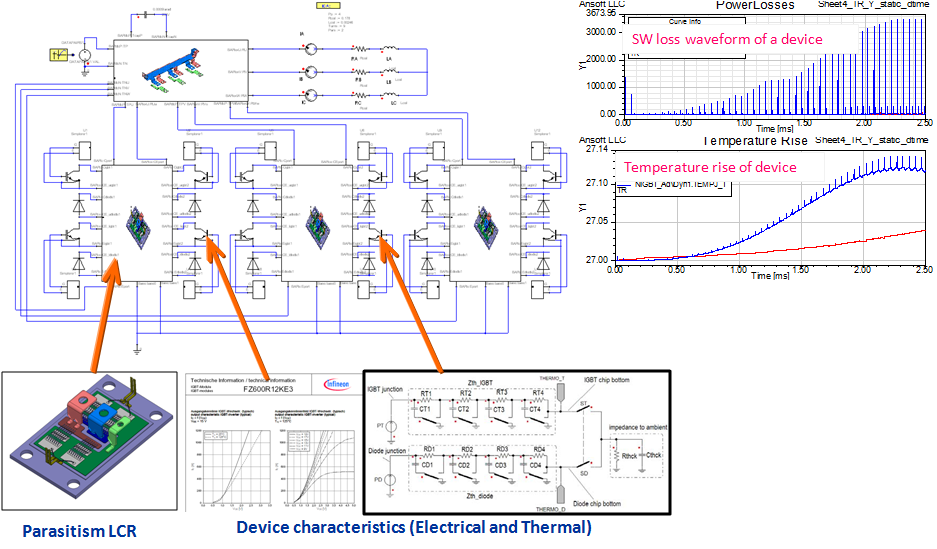
# 摘要
本文介绍了Simplorer软件在IGBT仿真应用中的重要性及其在电力电子领域中的应用。首先,文章概括了IGBT的基本理论和工作原理,涵盖其定义、组成、工作模式以及在电力电子设备中的作用。然后,详细探讨了Simplorer软件中IGBT模型的特点和功能,并通过仿真案例分析了IGBT的驱动电路和热特性。文章接着通过实际应用实例,如太阳能逆变器、电动汽车充放电系统和工业变频器,来
KUKA机器人的PROFINET集成:从新手到专家的配置秘籍
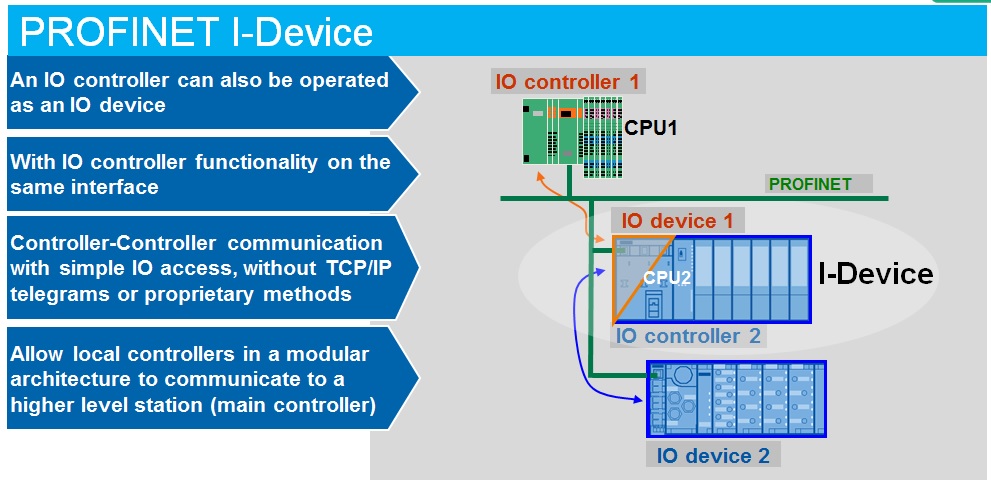
# 摘要
随着工业自动化技术的发展,KUKA机器人与PROFINET技术的集成已成为提高生产效率和自动化水平的关键。本文首先介绍KUKA机器人与PROFINET集成的基础知识,然后深入探讨PROFINET技术标准,包括通信协议、架构和安全性分析。在此基础上,文章详细描述了KUKA机器人的PROFINET配置方法,涵盖硬件准备、软件配置及故障诊断。进一步地,文章探讨了
STM32F030C8T6时钟系统设计:时序精确配置与性能调优
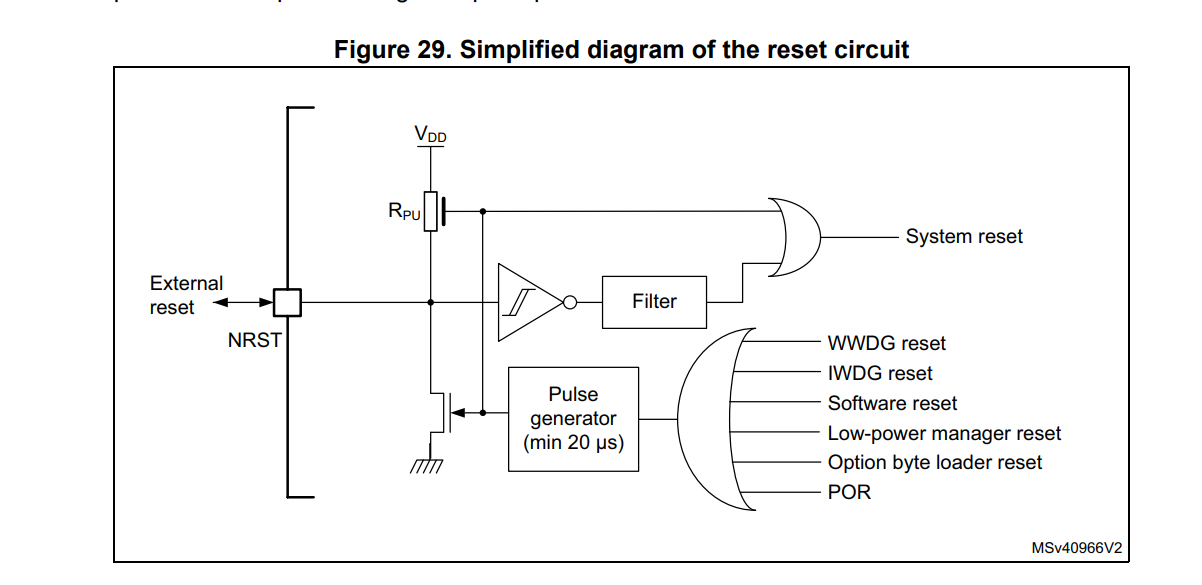
# 摘要
本文全面介绍了STM32F030C8T6微控制器的时钟系统,从基础配置到精确调优和故障诊断,详细阐述了时钟源选择、分频器、PLL生成器、时钟同步、动态时钟管理以及电源管理等关键组件的配置与应用。通过分析时钟系统的理论基础和实践操作,探讨了系统时钟配置的最优策略,并结合案例研究,揭示了时钟系统在实际应用中性能调优的效果与经验教训。此外,本文还探讨了提升系统稳定性的技术与策略
数字逻辑知识体系构建:第五版关键练习题精讲
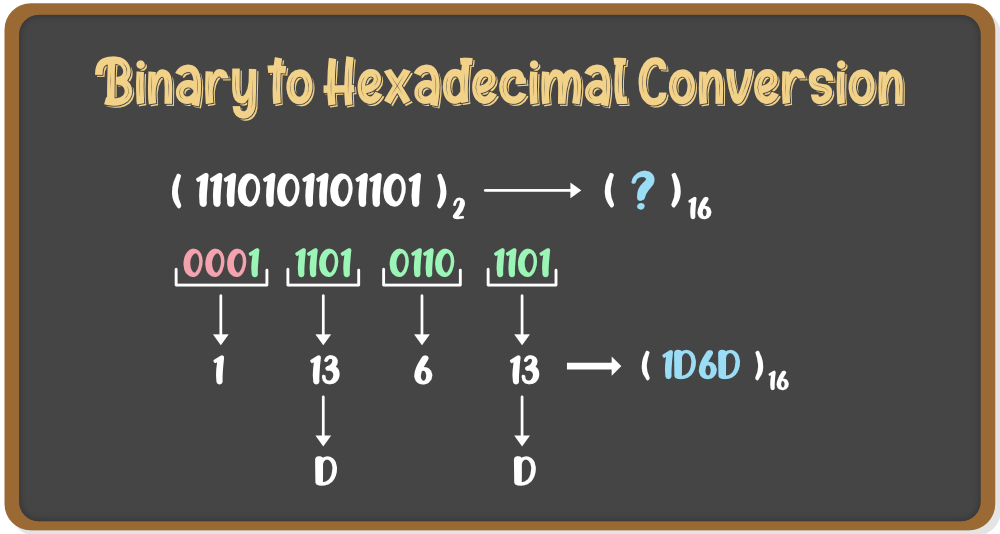
# 摘要
本文对数字逻辑的基本概念、设计技巧以及系统测试与验证进行了全面的探讨。首先解析了数字逻辑的基础原理,包括数字信号、系统以及逻辑运算的基本概念。接着,分析了逻辑门电路的设计与技巧,阐述了组合逻辑与时序逻辑电路的分析方法。在实践应用方面,本文详细介绍了数字逻辑设计的步骤和方法,以及现代技术中的数字逻辑应用案例。最后,探讨了
Element Card 常见问题汇总:24小时内解决你的所有疑惑

# 摘要
Element Card作为一种流行的前端组件库,为开发者提供了一系列构建用户界面和交互功能的工具。本文旨在全面介绍Element Card的基本概念、安装配置、功能使用、前后端集成以及高级应用等多方面内容。文章首先从基础知识出发,详述了Element Card的安装过程和配置步骤,强调了解决安装配置问题的重要性。随后,
【PyCharm从入门到精通】:掌握Excel操纵的必备技巧
# 摘要
本文详细介绍了PyCharm集成开发环境的安装、配置以及与Python编程语言的紧密结合。文章涵盖从基础语法回顾到高级特性应用,包括控制流语句、函数、类、模块、异常处理和文件操作。同时,强调了PyCharm调试工具的使用技巧,以及如何操纵Excel进行数据分析、处理、自动化脚本编写和高级集成。为了提升性能,文章还提供了PyCharm性能优化和
【提升VMware性能】:虚拟机高级技巧全解析
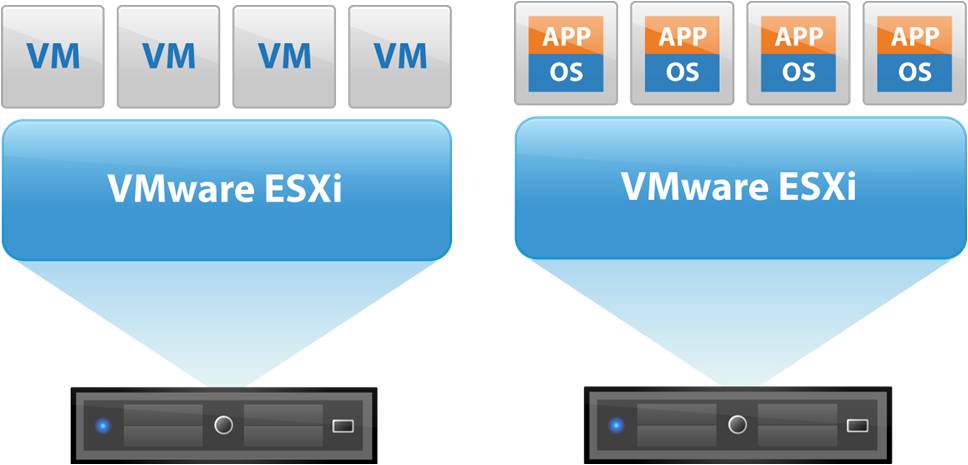
# 摘要
随着虚拟化技术的广泛应用,VMware作为市场主流的虚拟化平台,其性能优化问题备受关注。本文综合探讨了VMware在虚拟硬件配置、网络性能、系统和应用层面以及高可用性和故障转移等方面的优化策略。通过分析CPU资源分配、内存管理、磁盘I/O调整、网络配置和操作系统调优等关键技术点,本文旨在提供一套全面的性能提升方案。此外,文章还介绍了性能监控和分析工具的运用,帮助用户及时发
性能优化杀手锏:提升移动应用响应速度的终极技巧

# 摘要
移动应用性能优化是确保用户良好体验的关键因素之一。本文概述了移动应用性能优化的重要性,并分别从前端和后端两个角度详述了优化技巧。前端优化技巧涉及用户界面渲染、资源加载、代码执行效率的提升,而后端优化策略包括数据库操作、服务器资源管理及API性能调优。此外,文章还探讨了移动应用架构的设计原则、网络优化与安全性、性能监控与反馈系统的重要性。最后,通过案例分析来总结当前优化实践,并展望未来优
【CEQW2数据分析艺术】:生成报告与深入挖掘数据洞察
# 摘要
本文全面探讨了数据分析的艺术和技术,从报告生成的基础知识到深入的数据挖掘方法,再到数据分析工具的实际应用和未来趋势。第一章概述了数据分析的重要性,第二章详细介绍了数据报告的设计和高级技术,包括报告类型选择、数据可视化和自动化报告生成。第三章深入探讨了数据分析的方法论,涵盖数据清洗、统计分析和数据挖掘技术。第四章探讨了关联规则、聚类分析和时间序列分析等更高级的数据洞察技术。第五章将
ARM处理器安全模式解析:探索与应用之道

# 摘要
本文对ARM处理器的安全模式进行了全面概述,从基础理论讲起,详细阐述了安全状态与非安全状态、安全扩展与TrustZone技术、内存管理、安全启动和引导过程等关键概念。接着,文章深入探讨了ARM安全模式的实战应用,包括安全存储、密钥管理、安全通信协议以及安全操作系统的部署与管理。在高级应用技巧章节,本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )