OpenCV相机标定教程:张正友方法与源码解析
"这篇资料主要介绍了使用OpenCV进行相机标定的理论与实践,特别是张正友算法的应用。文中详细阐述了摄像机模型、坐标系转换以及摄像机标定的过程,包括传统的小孔模型和张正友算法。此外,还提到了畸变校正的相关公式和OpenCV中的实现细节。"
在机器视觉领域,摄像机标定是一个基础但至关重要的步骤,它涉及到将现实世界的三维空间坐标转换为二维图像坐标。OpenCV库提供了相机标定的工具和支持,使得开发者能够处理由于镜头畸变等因素导致的图像失真。
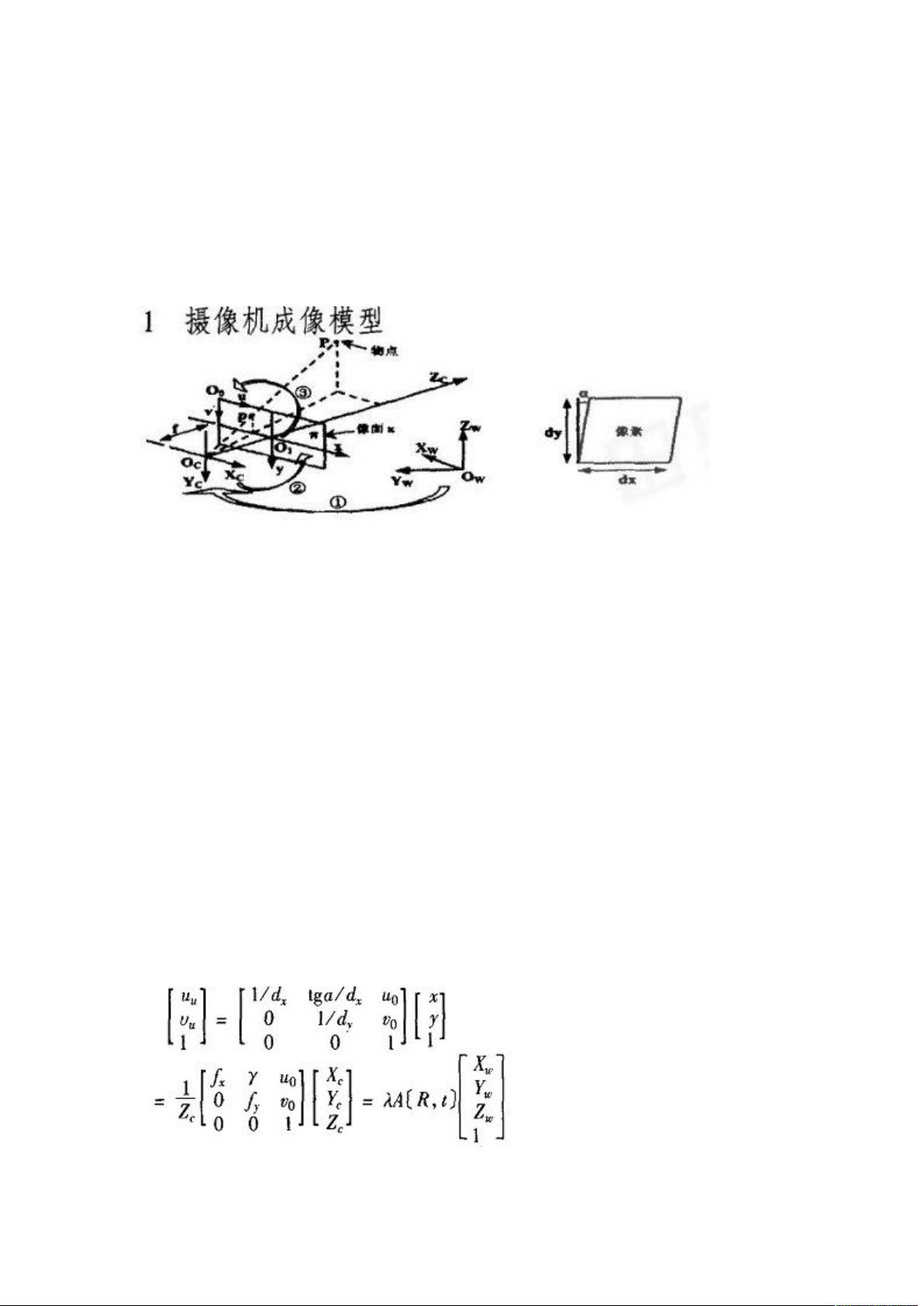
摄像机模型通常采用小孔成像模型,其中光心Oc、像面π、焦距f以及四个坐标系——世界坐标系Ow、摄像机坐标系Oc、图像物理坐标系O1(单位mm)和图像像素坐标系O(单位pix)构成了基本的成像框架。通过一系列坐标变换,可以将空间中的点P映射到图像上的点p。
张正友算法是一种广泛应用的摄像机标定方法,它基于多个不同角度拍摄的标定板图像,无需预先知道标定板的运动方式,就能估计出相机的内部参数(如相机矩阵A)和畸变系数。这种方法比自定标法精度更高,而且不需要高精度的外部定位设备。
畸变模型通常包括径向畸变、切线畸变和薄棱镜畸变,OpenCV中的函数通常只处理前两种,即k1、k2、p1和p2。更复杂的畸变模型可能还需要其他系数,但OpenCV默认不支持。
在实际应用中,标定的目标是得到视野平面上的像素与毫米的转换比例,以便对图像中的物体尺寸进行估算。然而,对于视野平面外的物体,仍需进行坐标转换。张正友算法的实施通常涉及计算图像坐标和理想图像坐标的差异,以求解畸变矫正的参数。
在提供的代码片段中,可以看到使用了OpenCV相关的头文件,这表明接下来可能会展示如何在C++程序中实现相机标定。实际的标定过程会涉及读取标定板图像、计算特征点、求解内参和畸变系数,并最终应用于图像校正。
OpenCV的摄像机标定功能结合张正友算法,为开发者提供了一种有效的方法来纠正图像畸变,提高机器视觉应用的准确性和可靠性。通过理解这些理论和实践,可以进一步提升图像处理和计算机视觉项目的效果。
摄像机的标定问题是机器视觉领域的入门问题,可以分为传统的摄像机定标方
法和摄像机自定标方法。定标的方法有很多中常见的有:Tsai(传统)和张正
友(介于传统和自定标)等,
摄像机成像模型和四个坐标系(通用原理)。
摄像机模型采用经典的小孔模型,如图中 Oc(光心),像面 π 表示的是视野平
面,其到光心的距离为 f(镜头焦距)。
四个坐标系分别为:世界坐标系(Ow),摄像机坐标系(Oc),图像物理坐
标系(O1,单位 mm),图像像素坐标系(O,位于视野平面的左上角,单位
pix)。
空间某点 P 到其像点 p 的坐标转换过程主要是通过这四套坐标系的三次转换实
现的,首先将世界坐标系进行平移和转换得到摄像机坐标系,然后根据三角几
何变换得到图像物理坐标系,最后根据像素和公制单位的比率得到图像像素坐
标系。(实际的应用过程是这个的逆过程,即由像素长度获知实际的长度)。
ps:通过摄像头的标定,可以得到视野平面上的 mm/pix 分辨率,对于视野平
面以外的物体还是需要通过坐标转换得到视野平面上。
转化的过程和公式参见:摄像机标定原理(关键是三个坐标系).ppt
下载后可阅读完整内容,剩余8页未读,立即下载
2013-10-11 上传
点击了解资源详情
2024-10-30 上传
2014-04-25 上传
2011-07-08 上传
2016-07-14 上传
点击了解资源详情
点击了解资源详情

xkdjiangwei
- 粉丝: 0
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







