8步操作:疫情下利用MOOC进行混合式教学
需积分: 10 42 浏览量
更新于2024-07-16
收藏 4.61MB PDF 举报
"基于MOOC实现混合式教学是一种在疫情期间支持停课不停学、不停教的有效策略。利用慕课在线教学平台如学堂在线,教师可以轻松减轻备课负担,同时激发学生的主动学习兴趣。该方法分为8个步骤来实施在线教学:
1. 模式简介:教师主要负责引导学生选择适合的慕课,而学堂在线平台则提供丰富的课程资源和在线教学环境,包括慕课视频、直播、自主学习、论坛答疑、作业提交和在线考试。
2. 模式特点:
- 学校无需搭建专属的SPOC平台,节省成本。
- 教师无需花费大量时间制作课程内容,只需要规划学习路径和答疑。
- 学生自主选择课程,通过慕课学习,教师可利用直播进行实时互动答疑,或通过微信群提供额外辅导。
3. 8步实施指南:
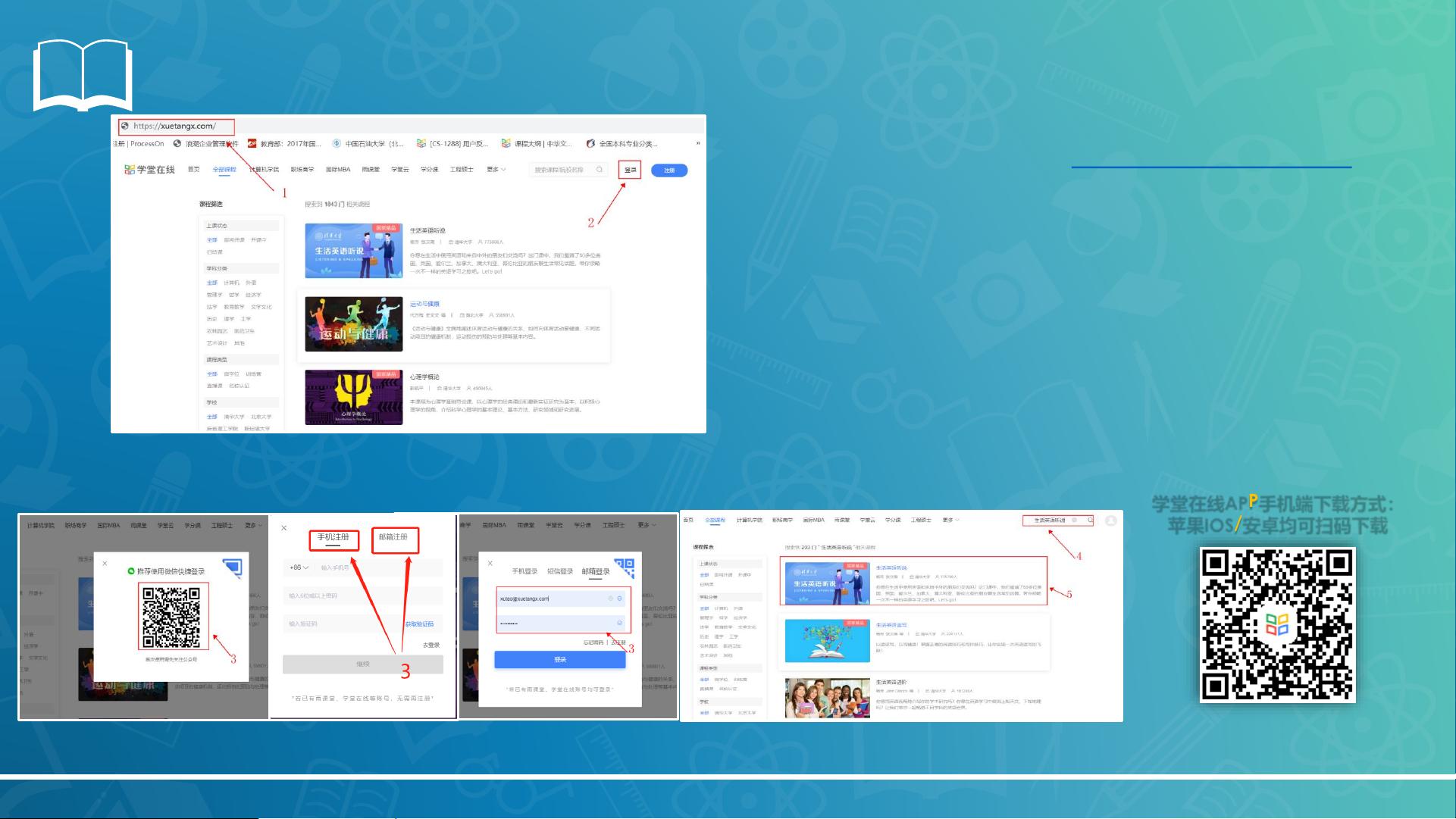
- 第一步:教师登录学堂在线,搜寻并选定合适的慕课。
- 第二步:明确课程时间,并指导学生注册账号和选课。
- 第三步:确保学生正确填写个人信息,按照课程进度进行学习。
- 第四步至第六步:教师设计互动答疑环节,安排额外考核任务。
- 第七步:学习结束后,教师从慕课平台获取学生的学习数据。
- 第八步:汇总在线成绩,核算学生的综合表现。
4. 准备工作与直播预案:教师应提前准备好直播和互动答疑的配套工作,例如创建答疑群,预录制串讲视频或PPT以备不时之需。在直播环节,教师可以通过预先上传的内容指导学生自主学习。
通过这个混合式教学模式,不仅实现了教学的灵活性,也提升了教学效率和质量,使得疫情期间的教学活动得以顺利进行。"
剩余21页未读,继续阅读
2020-05-05 上传
2023-06-01 上传
2023-09-13 上传
2023-08-17 上传
2023-12-27 上传
2023-05-13 上传
2023-07-29 上传
2023-06-06 上传

liujianhua2010
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
