C-COT目标跟踪技术:超越相关滤波的连续卷积操作
需积分: 9 163 浏览量
更新于2024-07-16
收藏 2.61MB PDF 举报
"C-COT_VOT16_slides.pdf是目标跟踪领域内一篇重要论文C-COT的作者在报告中使用的幻灯片,主要探讨了超越相关滤波器(Beyond Correlation Filters)在视觉追踪中的应用,特别是学习连续卷积操作符(Learning Continuous Convolution Operators)对提升追踪性能的重要性。"
这篇PPT详细介绍了相关滤波器(Correlation Filters,简称DCF)在视觉追踪领域的应用和其局限性。DCF是一种常用的目标检测和识别方法,自2014年以来,已经成为了许多顶级追踪算法(如KCF、DSST、HCF、SRDCF、Staple等)的基础,展示了其在对象识别和检测中的强大能力。
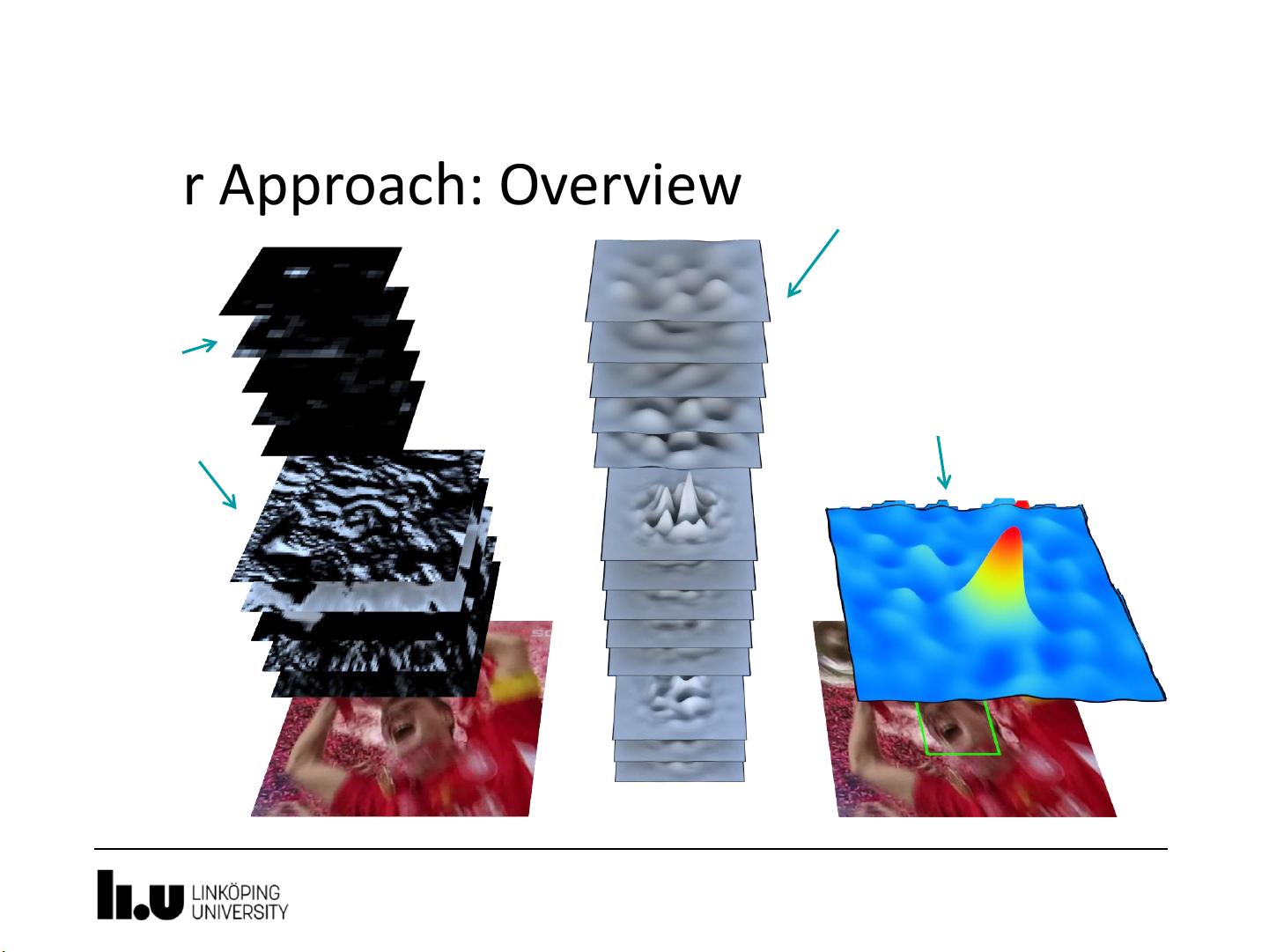
然而,DCF方法存在一个关键限制:它依赖于单分辨率特征图。这种结构导致了输出得分的粗糙,即在保持高分辨率时,模型的不变性较低,而在提高不变性时,又牺牲了分辨率。具体来说,浅层的卷积层提供了较高的空间分辨率但低的特征不变性,而深层的卷积层则相反,具有较高的不变性但低的分辨率。这成为了一个问题,因为理想情况下,我们希望同时拥有高分辨率和高不变性。
为了解决这一问题,PPT提出了两个可能的解决方案,但它们各自都有缺点。首先,尝试通过显式重采样来融合不同分辨率的信息,但这可能导致失真、信息损失以及冗余数据。其次,使用独立的DCF并后期融合,但这可能导致次优结果,因为忽略了不同层之间的潜在相关性。
C-COT论文的作者马丁·丹尼尔延(Martin Danelljan)、安德烈亚斯·罗宾逊(Andreas Robinson)、法哈德·沙赫巴兹·汗(Fahad Shahbaz Khan)和迈克尔·费尔斯伯格(Michael Felsberg)提出了一种超越DCF的方法,即学习连续卷积操作符,以克服上述限制。这种方法旨在通过更灵活和精确地处理特征图的分辨率和不变性,来提升目标跟踪的性能和鲁棒性。
这篇PPT深入讨论了DCF在视觉追踪中的作用,以及如何通过改进方法来克服其局限性,为后续的视觉追踪研究提供了重要的理论基础和实践指导。
DCF Limitations:
3. Coarse labels
• Why a problem?
– Accurate learning
• Sub-grid or sub-pixel supervision
• How to solve?
– Interweaving?
• Costly
– Explicit interpolation of features?
• Artefacts
6
Beyond Correlation Filters: Learning Continuous Convolution Operators for Visual Tracking
剩余31页未读,继续阅读
521 浏览量
328 浏览量
590 浏览量
360 浏览量
132 浏览量
231 浏览量
2023-06-11 上传
102 浏览量
2023-06-11 上传
157 浏览量

我是陈艾伦呀!
- 粉丝: 171
 我的内容管理
展开
我的内容管理
展开







最新资源
- 免费教程:Samba 4 1级课程入门指南
- 免费的HomeFtpServer软件:Windows服务器端FTP解决方案
- 实时演示概率分布的闪亮Web应用
- 探索RxJava:使用RxBus实现高效Android事件处理
- Microchip USB转UART转换方案的完整设计教程
- Python编程基础及应用实践教程
- Kendo UI 2013.2.716商业版ASP.NET MVC集成
- 增强版echarts地图:中国七大区至省详细数据解析
- Tooloop-OS:定制化的Ubuntu Server最小多媒体系统
- JavaBridge下载:获取Java.inc与JavaBridge.jar
- Java编写的开源小战争游戏Wargame解析
- C++实现简易SSCOM3.2功能的串口调试工具源码
- Android屏幕旋转问题解决工具:DialogAlchemy
- Linux下的文件共享新工具:Fileshare Applet及其特性介绍
- 高等应用数学问题的matlab求解:318个源程序打包分享
- 2015南大机试:罗马数字转十进制数代码解析
