激光音频传输设备:自动对准的无线安全通信
需积分: 9 122 浏览量
更新于2024-09-06
收藏 528KB PDF 举报
"Laser Audio Transmitter - 一个无需用户手动对准的激光音频传输概念设备,通过单轴发射/接收装置将模拟音频信号通过激光束传输,接收器使用伺服电机由微控制器控制自动对准,实现无线音频信号传输,且具有防止被窃听的安全特性。"
本文介绍了一个创新项目——Laser Audio Transmitter,它探索了利用激光束作为传输媒介进行音频信号传递的可能性。传统的无线音频传输技术,如蓝牙或Wi-Fi,可能会面临信号干扰和安全问题。相比之下,激光音频传输提供了一种更为聚焦和定向的通信方式。
项目的核心在于一个单轴的发射器/接收器设置。发射器接收通过标准3.5mm音频插孔输入的模拟音频信号,并将其转换为光信号,通过激光束发送出去。接收端则能在一个水平平面上自由旋转,内置的伺服电机由微控制器精确控制,自动调整接收角度,确保与发射器的激光束对齐,即使在移动或稍微偏移的情况下也能保持连接。
激光通信的一个关键优势是其方向性,这使得激光音频传输具有更高的安全性。由于激光束只能在直线上传播,除非有特定的接收设备,否则其他设备难以捕获或“窃听”到传输的音频信号。这在某些需要保密或物理连接不切实际的环境中,例如军事通信、远程监控或者安全敏感的会议中,具有显著的应用价值。
此外,激光通信还具备高速传输数据的能力,尽管此项目主要关注音频传输,但激光技术在自由空间光学(Free Space Optics, FSO)领域的应用也包括高速数据传输,可以用于远距离、高带宽的通信需求。FSO在城市间的互联网连接、无人机通信以及太空通信等方面展现出巨大潜力。
然而,激光通信也有其挑战,比如大气条件(如雾霾、雨雪或湍流)可能影响光束的传播质量和稳定性。为了克服这些障碍,可能需要采用纠错编码、功率调整或者使用多路径传输等技术。
Laser Audio Transmitter项目展示了一个结合激光技术和音频传输的创新方案,它不仅提供了一种新颖的无线音频传输方式,而且在安全性和隐私保护方面表现出优势。随着技术的发展,激光通信有可能成为未来音频和数据传输的重要组成部分。
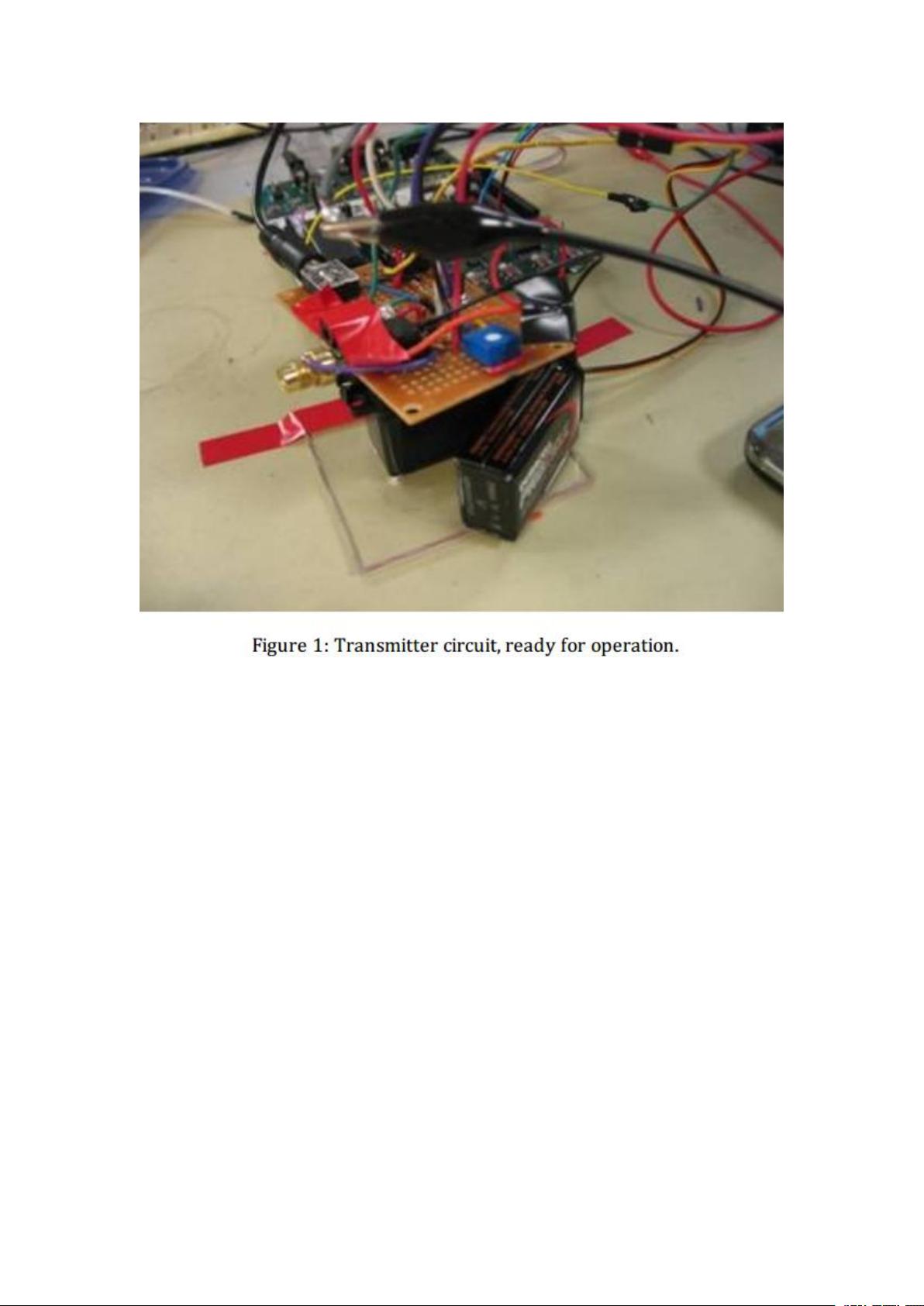
The transmitter is broken down into three circuits. The 1irst circuit, which is similar to the
receiver end, is the laser audio transmission circuit. This transmitter works by modulating
the amplitude of the laser based on the amplitude of the audio signal that we are trying to
transmit.
The audio, which is fed to the circuit through a standard 3.5mm audio jack, is sent to an
adder circuit. The adder, shown below, consists of two inputs and a negative feedback
resistor that will be summed together. The two connections to the non-inverting input of the
op-amp are the audio signal and a DC bias signal that is generally kept at around 3V. This
voltage can be modi1ied by adjusting a potentiometer. �
The signal to the inverting input of the op-amp is half that of the output, which is obtained
by using a voltage divider of two equal resistors. This feedback allows the op-amp to
follow the amplitude of the non-inverting input as it attempts to equate the voltages at
the two inputs. The output of the op-amp is sent directly to the laser. The amplitude of the
laser is proportional to the voltage that is applied to it. The amplitude linearly follows the
voltage up to roughly 4V, at which point the response is more exponential. We are taking
advantage of the linear region of the response to send a mostly unmodi1ied audio signal to
the receiver for playback. The laser needs to be turned off while the transmitter is scanning
for the receiver, mainly for safety and power reasons. To achieve this, the 9V supply to the
op-amp is controlled by an NPN transistor, which can act as a switch controlled by the
microcontroller.
剩余12页未读,继续阅读
2021-12-18 上传
2023-12-11 上传
2023-05-30 上传
2023-06-12 上传
2023-04-04 上传
2023-05-24 上传
2024-02-22 上传
2023-06-01 上传

NULLnoterror
- 粉丝: 247
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
