动态规划算法详解与最优二叉查找树构建
需积分: 0 21 浏览量
更新于2024-07-01
收藏 4.49MB PDF 举报
"动态规划算法是解决多段决策过程最优化的一种通用方法,由美国数学家Richard Bellman在20世纪50年代提出。动态规划的核心思想是通过将复杂问题分解成多个阶段,并利用最优性原理,确保每个阶段的决策都是基于之前阶段最优决策的结果。这种方法特别适用于那些可以通过逐步决策达到全局最优解的问题。
动态规划的定义: 动态规划是一种算法设计技术,它通过将问题分解成子问题,然后逐个解决这些子问题,最终组合成原问题的最优解。这种方法避免了重复计算,提高了效率。
计算二项式系数: 在数学中,二项式系数是在展开二项式幂次时出现的系数,例如在 (a + b)^n 的展开式中。计算二项式系数通常涉及到组合数学,可以使用组合公式 C(n, k) = n! / (k!(n-k)!), 其中 n! 表示 n 的阶乘。动态规划可以用于高效地计算大数值的二项式系数,避免因阶乘计算导致的溢出问题。
Warshall算法思想: Warshall算法,也称为弗洛伊德算法,主要用于求解图的最短路径问题。它通过迭代的方式更新所有顶点对之间的最短路径,直到所有可能的路径都被考虑。每次迭代中,算法会检查每一对顶点是否可以通过第三个顶点使得路径变得更短。经过n(n-1)(n-1)次迭代后,算法能保证找到图中所有顶点对的最短路径。
设计动态规划算法的步骤:
1. 划分阶段: 将问题分解成一系列连续的阶段,每个阶段代表问题的一个部分。
2. 选择状态: 定义每个阶段的可能状态,这些状态能够完全描述问题在该阶段的情况。
3. 确定决策和状态转移方程: 建立状态转移方程,描述如何从一个阶段的状态转移到下一个阶段的状态,这通常涉及找到一个最优决策规则。
动态规划算法的特点:
- 动态性: 状态是通过之前阶段的状态动态计算得出的,每个阶段的状态都依赖于其直接前驱状态。
- 重叠子问题: 很多动态规划问题中,相同或相似的子问题会被多次遇到,通过存储和重用这些子问题的解可以提高效率。
- 最优子结构: 问题的最优解包含其子问题的最优解,这是动态规划能够工作的重要基础。
动态规划广泛应用于各种领域,如计算机科学、经济学、生物学等,包括背包问题、最长公共子序列、最短路径问题、矩阵链乘法、构建最优二叉查找树等。在构建最优二叉查找树问题中,动态规划可以找到一棵二叉查找树,使得对于给定的一组搜索频率,它的平均查找长度最短。"
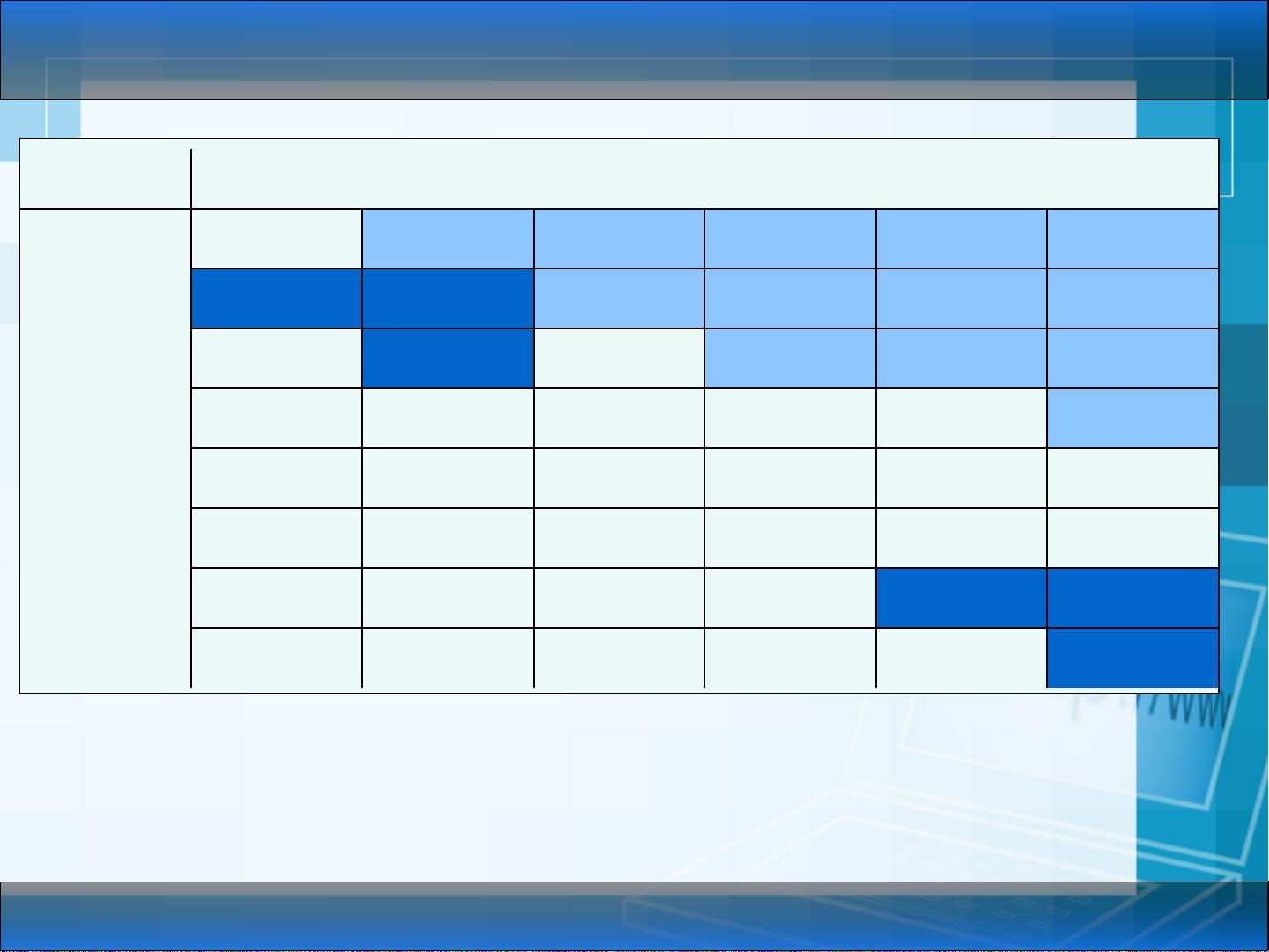
8.1 计算二项式系数
C(n,k) 0 1 2 … k-1 k
0 1
1 1 1
2 1 2 1
…
k 1 1
…
n-1 1 C(n-1,k-1) C(n-1,k)
n 1 C(n,k)
22
C(n,k)=C(n-1,k-1)+C(n-1,k),n>k>0
C(n,0)=C(n,n)=1
帕斯卡三角形
算法分析与设计 兰州大学信息学院

剩余50页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-05-08 上传
2013-06-06 上传
点击了解资源详情

我有多作怪
- 粉丝: 30
- 资源: 298
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多步表单
- ADcontroller.rar_VHDL/FPGA/Verilog_VHDL_
- 适用于WebMessage客户端的iOS调整伴侣-Swift开发
- symhx-backstage
- pika:Pure Python RabbitMQAMQP 0-9-1客户端库
- SynchQt-开源
- wp的Web服务编程案例
- 你好,世界
- tic-tac-toe.rar_棋牌游戏_Java_
- typescript-api:使用打字稿制作的REST API服务器
- 金字塔:金字塔-一个Python网络框架
- transfer-.meta-to-.pb:把模型的ckpt文件和meta文件转化成pb文件
- Tabs To Batch-crx插件
- Swift的XML / HTML解析器-Swift开发
- index.php_QQ浏览器压缩包.zip
- 参考资料-FR-NK0115资金审批单(加编号).zip
