Cypress S25FL128S/S25FL256S SPI Flash Memory Chip Manual
需积分: 47 190 浏览量
更新于2024-07-17
收藏 4.86MB PDF 举报
"S25FL128S是一款由 Cypress Semiconductor Corporation 生产的SPI闪存芯片,主要用于存储数据。该芯片提供128兆比特(16兆字节)的存储容量,采用3.0伏的核心CMOS技术,并且支持SPI多I/O接口。手册详细介绍了其特性、读写操作、编程与擦除功能以及错误校验等高级功能。"
S25FL128S是Cypress Semiconductor推出的一款高密度SPI闪存芯片,主要用于需要高速、低功耗存储解决方案的应用场景。这款芯片的主要特点包括:
1. **电压兼容性**:它采用3.0伏的CMOS核心,能够适应各种工作环境,同时保持高效能和低功耗。
2. **SPI接口与多I/O支持**:S25FL128S支持SPI接口,且提供了SPI多I/O模式,包括SPI时钟极性和相位模式0和3,以及双输入、四输入模式,允许更快速的数据传输。此外,还有DDR(Double Data Rate)选项,进一步提高数据读取速率。
3. **地址扩展**:支持24位和32位的地址选项,使得在大容量存储中可以访问到更广阔的地址空间。
4. **兼容性**:该芯片的串行命令集和脚印与S25FL-A、S25FL-K和S25FL-PS系列SPI家族兼容,而多I/O命令集则与S25FL-PSPI家族兼容,方便在不同设计中进行替换或升级。
5. **读取命令**:提供多种读取方式,如正常读、快速读、双I/O读、四I/O读、快速DDR、双I/O DDR和四I/O DDR,满足不同速度需求。其中,自动启动功能可在电源上电或复位后自动执行预设的读取命令。
6. **编程功能**:具备256字节或512字节的页编程缓冲区,支持慢速时钟系统的四输入页编程(QPP)。内置ECC(错误校验码)硬件,能进行单比特错误修正,确保数据的可靠性。
7. **擦除功能**:采用混合扇区设计,每个物理扇区包含32个4KB的小扇区,擦除速度在0.5至0.65MBps之间,提供灵活的擦除操作。
8. **配置信息**:支持Common Flash Interface (CFI) 数据,用于获取配置信息,简化了设备的初始化和管理。
9. **安全性**:除了自动ECC功能,S25FL128S可能还提供了其他的安全特性,例如保护区域、安全擦除或写锁定,以保护存储在其中的数据免受未授权访问。
S25FL128S是一款高性能、高容量的SPI闪存,适用于嵌入式系统、物联网设备、工业控制和消费电子等多种应用场景,它的多种读写模式和扩展功能使其在数据存储领域具有广泛的应用前景。
Document Number: 001-98283 Rev. *P Page 16 of 145
S25FL128S/S25FL256S
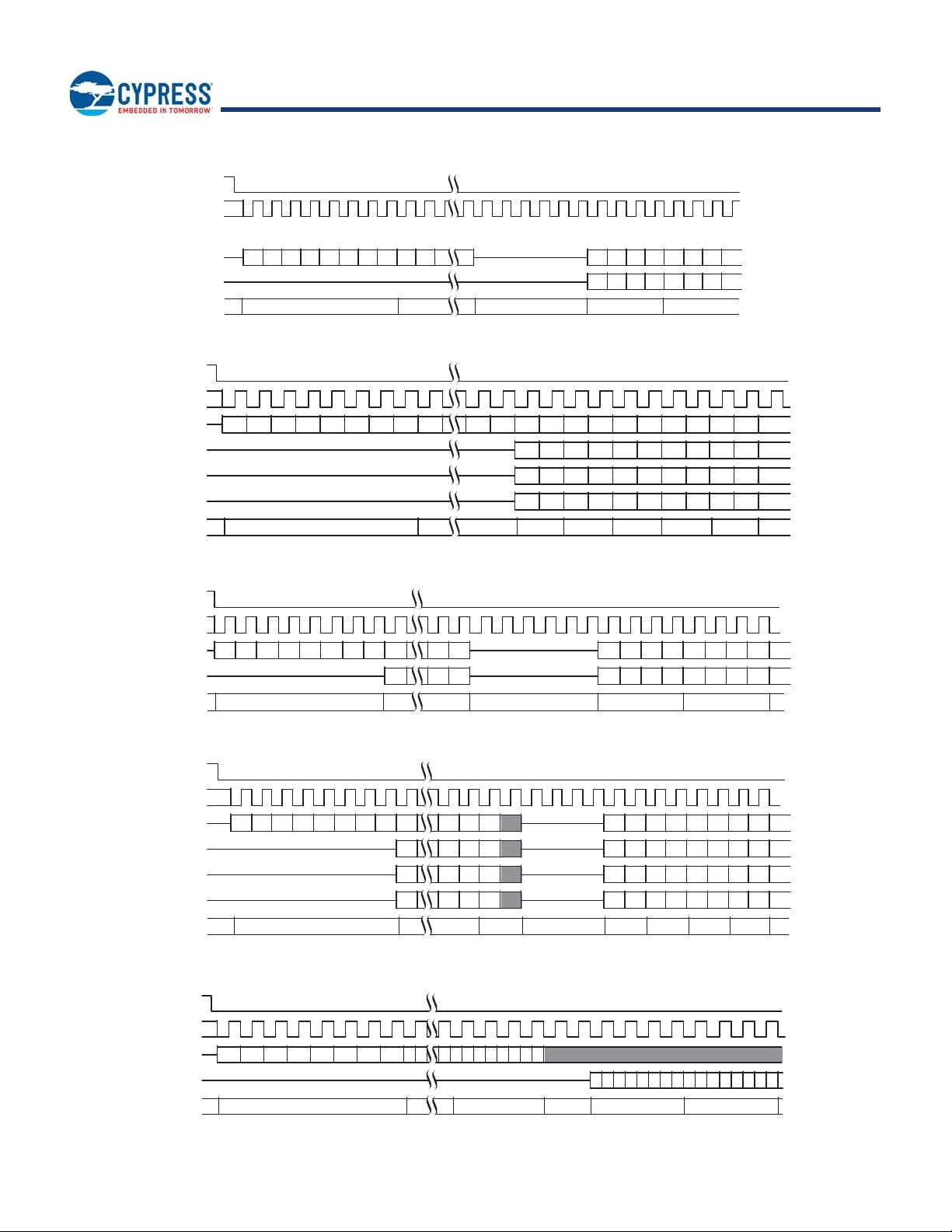
Figure 12. Dual Output Command
Figure 13. Quad Output Command without Latency
Figure 14. Dual I/O Command
Figure 15. Quad I/O Command
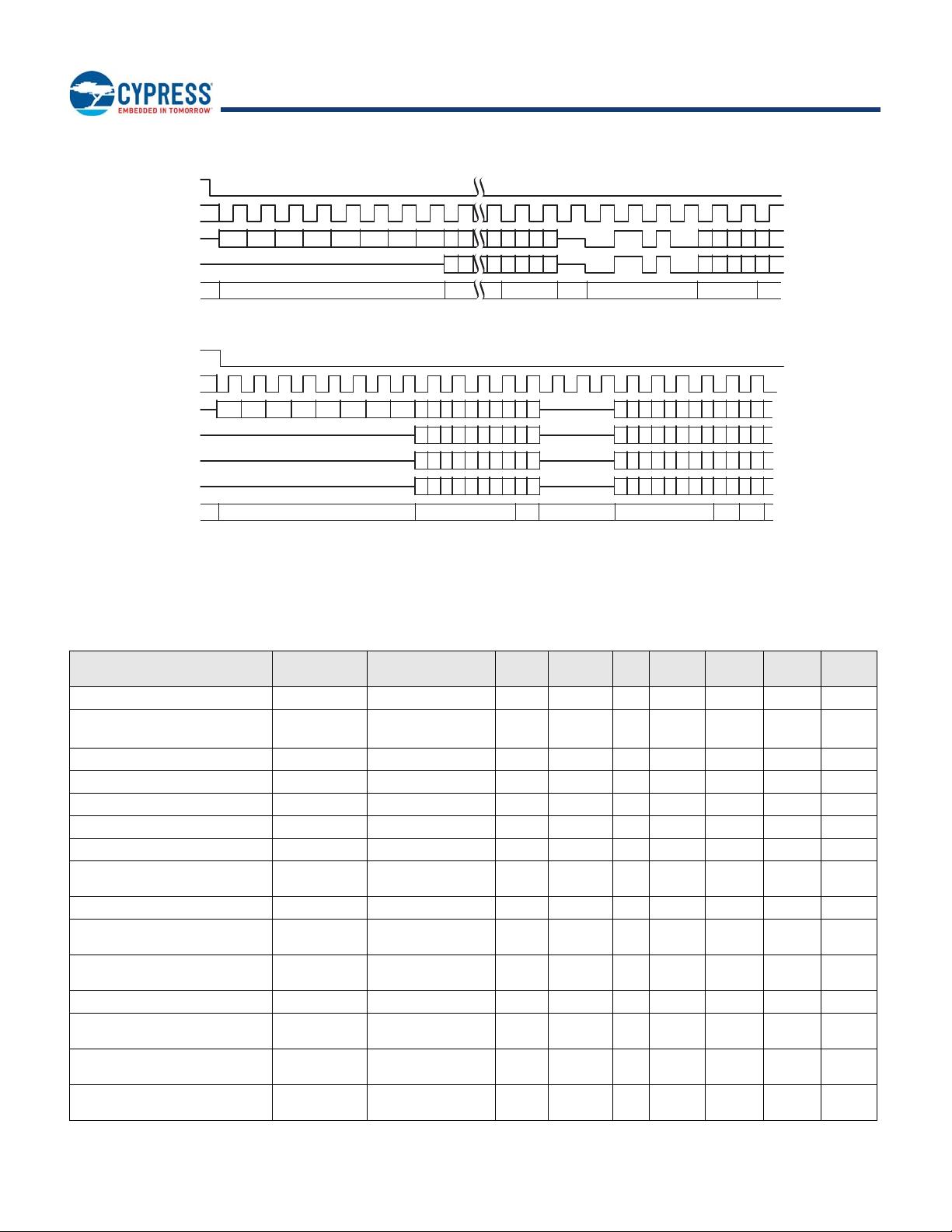
Figure 16. DDR Fast Read with EHPLC = 00b
CS#
SCK
IO0
IO1
Phase
7 6 5 4 3 2 1 0 31 30 29 0 6 4 2 0 6 4 2 0
7 5 3 1 7 5 3 1
Instruction Address 6 Dummy Data 1 Data 2
CS#
SCK
IO0
IO1
IO2
IO3
Phase
7 6 5 4 3 2 1 0 31 1 0 4 0 4 0 4 0 4 0 4 0 4
5 1 5 1 5 1 5 1 5 1 5
6 2 6 2 6 2 6 2 6 2 6
7 3 7 3 7 3 7 3 7 3 7
Instruction Address Data 1 Data 2 Data 3 Data 4 Data 5 ...
CS#
SCK
IO0
IO1
Phase
7 6 5 4 3 2 1 0 30 2 0 6 4 2 0 6 4 2 0
31 3 1 7 5 3 1 7 5 3 1
Instruction Address Dummy Data 1 Data 2
CS#
SCK
IO0
IO1
IO2
IO3
Phase
7 6 5 4 3 2 1 0 28 4 0 4 4 0 4 0 4 0 4 0
29 5 1 5 5 1 5 1 5 1 5 1
30 6 2 6 6 2 6 2 6 2 6 2
31 7 3 7 7 3 7 3 7 3 7 3
Instruction Address Mode Dummy D1 D2 D3 D4
CS#
SCK
SI
SO
Phase
7 6 5 4 3 2 1 0 3130 0 7 6 5 4 3 2 1 0
7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0
Instruction Address Mode Dummy Data 1 Data 2


剩余144页未读,继续阅读
2023-08-19 上传
2021-09-28 上传
点击了解资源详情
点击了解资源详情
2024-11-09 上传
2024-11-09 上传


weixin_39988654
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







