S7-1500读取V90伺服驱动器参数教程:EPOS模式与FB286/287应用
版权申诉
173 浏览量
更新于2024-08-04
收藏 978KB DOCX 举报
在S7-1500系列PLC与V90伺服驱动器的数据通信中,获取电流扭矩等关键参数是自动化控制过程中的重要环节。本文提供了两种具体的参数读取方法。
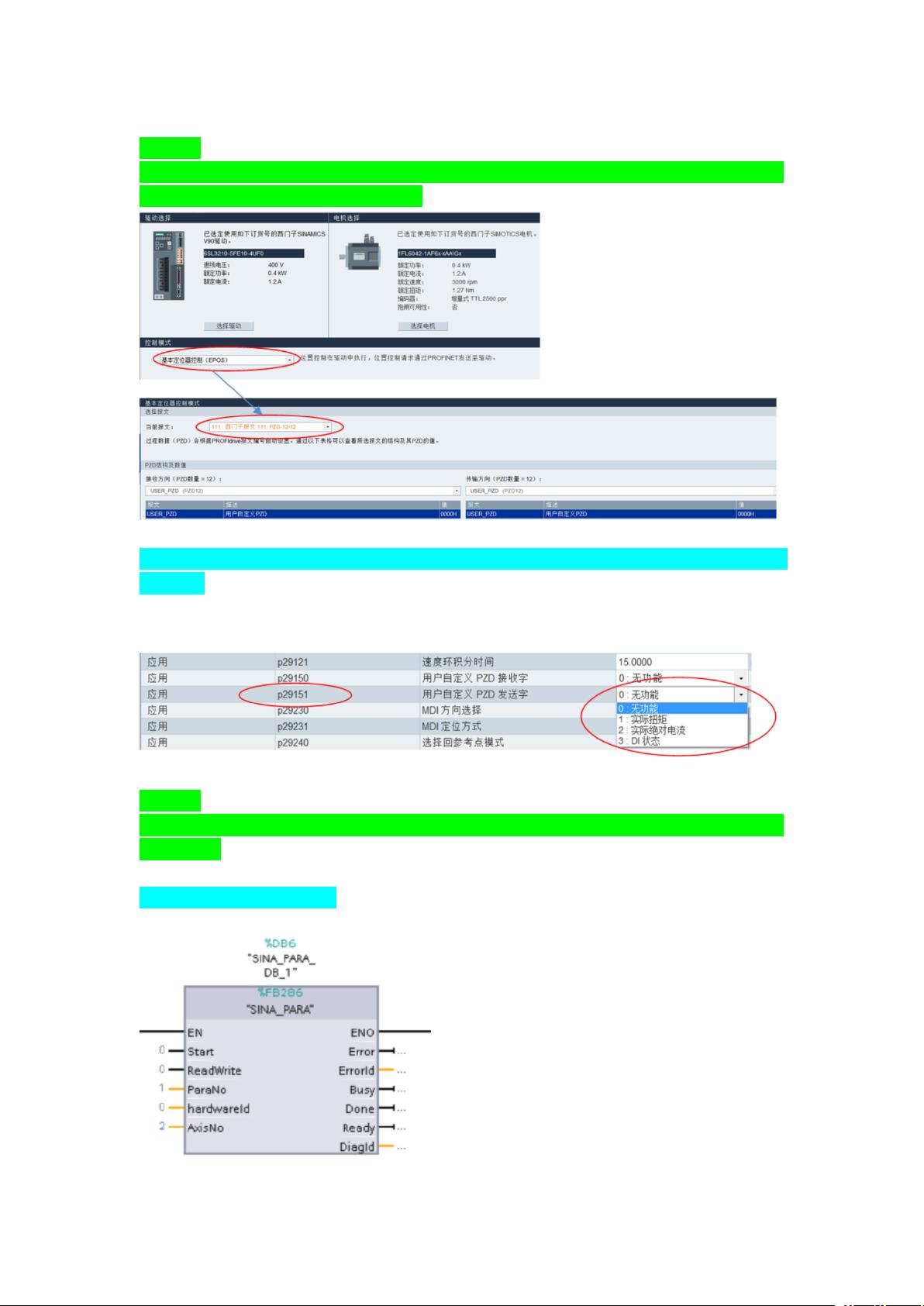
方法一:EPOS控制模式下的标准报文111
当V90PN伺服驱动器配置在EPOS控制模式下,其报文结构允许用户自定义保留字PZD12。通过调整PLC中的参数P29151(用户自定义PZD发送字),可以设定报文内容,以便获取实际扭矩(Tq实际)和实际绝对电流(Ia实际)等运行数据。DI状态也可以作为可选的数据源。这种方法适用于特定的报文交互场景,但可能不适用于所有驱动器或非标准协议。
方法二:非周期通讯FB286/SINA_PARA功能块
另一种更通用的方法是利用S7-1500的FB286(SINA_PARA)或FB287(SINA_PARA_S)功能块进行基于非周期通讯的数据读取。这些功能块支持批量读写驱动器参数,例如整型参数P2581和实型参数P29120。用户需要提供硬件标识符(hardwareID)、轴号(AxisNo,如V90PN的轴2)等信息,并通过输入输出管脚(Start, ReadWrite, ParaNo等)控制读写操作。当完成参数操作后,可以通过检查BUSY和DONE标志来确保任务执行完毕或检测错误。
注意事项:
- 在使用FB286/287时,确保对每个参数的类型(整型或实型)进行正确处理,整型数据存储在sdValue中,实型数据存储在srValue中。
- 参数有下标时,需要在sindex中指定。
- 在读写操作前,设置Start信号,操作完成后应复位该信号以确保程序的正确流程。
这两种方法的选择取决于你的具体应用需求和系统配置,理解并灵活运用它们可以帮助你有效地监控和管理V90伺服驱动器的运行状态,提高PLC与驱动器的集成效率。
S7-1500 系列 PLC 读取 V90 伺服驱动器电流扭矩等参数的具体方法示例(2 种)
示例 1:
当 V90PN 配置为 EPOS 控制模式下的标准报文 111 时,报文中在接受与发送方向均包含一
个可供用户自定义的保留字(PZD12)。
在这种条件下,可以通过修改参数 P29151(用户自定义 PZD 发送字)来定义传输方向 PZD12
的内容。
可选的运行数据为实际扭矩、实际绝对电流、DI 状态。如果需要读取此外其他运行数据请
参考示例方法 2。
示例 2:
通过基于非周期通讯的 FB286(SINA_PARA)或 FB287(SINA_PARA_S)功能块读取驱动器
运行数据。
通过 FB286 读写多个参数:
下载后可阅读完整内容,剩余7页未读,立即下载
2024-12-24 上传
319 浏览量
245 浏览量
1391 浏览量
点击了解资源详情
331 浏览量
770 浏览量









