工业机器人本体结构解析:关节与连杆
版权申诉
189 浏览量
更新于2024-06-29
收藏 3.57MB PPTX 举报
"本资源主要介绍了工业机器人本体结构的相关知识,包括工业机器人的发展历程、基本术语、图形符号以及各类关节的定义和特点。通过学习,旨在帮助理解和掌握工业机器人的机械结构及其工作原理。"
在深入理解工业机器人本体结构时,首先需要熟悉一些基本概念。"关节"是构成机器人运动的基础,它允许机器人各部件之间产生相对运动。根据接触方式的不同,关节分为高副和低副。高副机构如齿轮副和凸轮副,涉及点或线的接触,提供两个自由度;而低副机构则是通过面的接触形成,如常见的铰链连接。在机器人中,关节的具体类型包括:
1. 回转关节:也称为回转副,允许两构件围绕固定轴线进行相对转动,如图中的(a)所示。
2. 移动关节:又称移动副或滑动关节,使得一构件相对于另一构件沿直线运动,如图中的(b)所示。
3. 圆柱关节:或称回转移动副,这种关节能同时实现旋转和直线运动,如图中的(c)所示。
4. 球关节:又称为球面副,允许构件在三维空间中绕固定点进行三个独立的转动,如图中的(d)所示。
连杆是机器人结构中的另一个关键元素,它们是相邻关节之间的刚性连接部分,确保各关节之间保持固定的关系。连杆的设计和材质选择对机器人的精度、负载能力和工作范围有着直接影响。
此外,理解机器人的图形符号体系和表示方法对于分析和设计机器人系统至关重要。这些图形符号有助于清晰地描绘机器人的运动简图,从而更好地理解其运动学和动力学特性。
在实际的工业机器人应用系统调试运行中,对这些基本结构的理解是必不可少的。调试过程可能涉及到调整机器人各关节的参数,优化机器人的运动路径,确保其在工作环境中能准确、高效地执行任务。这可能包括校准关节角度,设置速度和加速度限制,以及测试机器人的负载能力。
掌握工业机器人的结构和工作原理对于设计、维护和优化机器人系统至关重要。通过学习和实践,可以深入理解机器人的运动控制、精度提升和故障排查等方面,从而在工业自动化领域发挥更大的作用。
学习任务实施
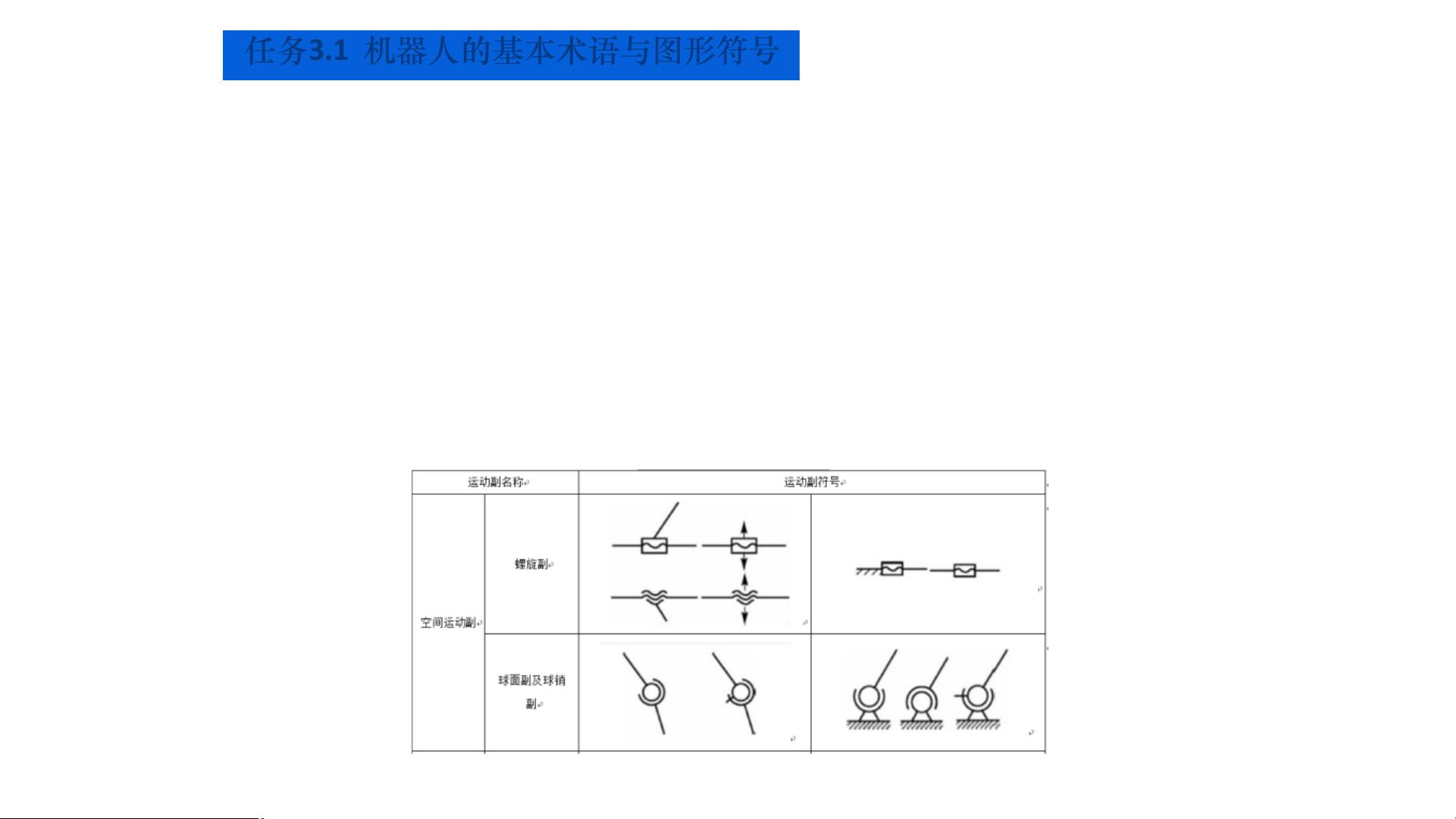
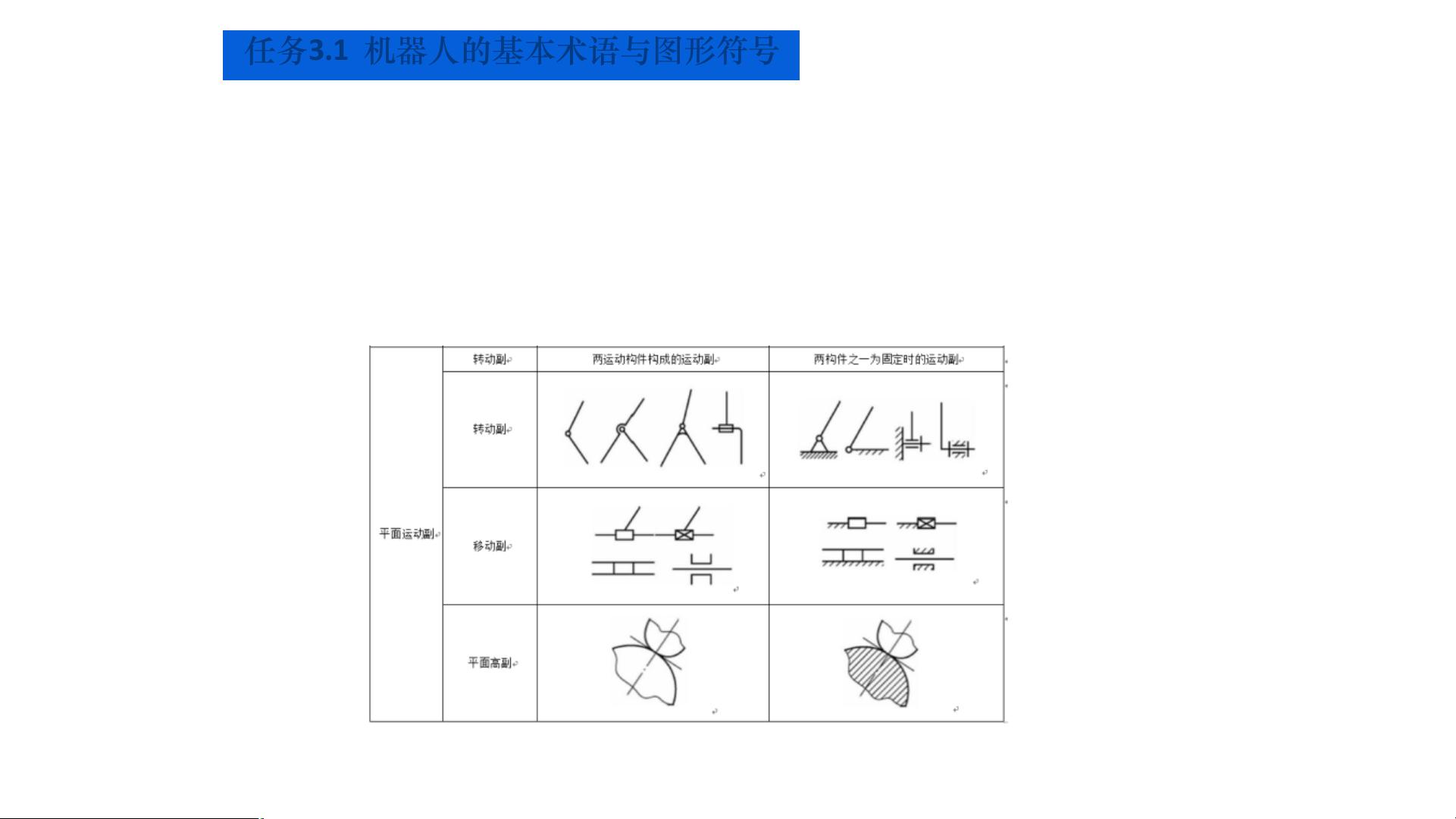
3.1.2 机器人的图形符号体系
1.运动副的图形符号
机器人所用的零件和材料以及装配方法等与现有的各种机械完全相同。
机器人常用的关节有移动、旋转运动副,常用的运动副图形符号如表3-1所
示。
任
任
务
务
1.1
1.1
工
工
业
业
器
器
人
人
的
的
发
发
展
展
历
历
程
程
认
认
知
知
表3-1 常用的运动副图形符号
任
任
务
务
3.1
3.1
机
机
器
器
人
人
的
的
基
基
本
本
术
术
语
语
与
与
图
图
形
形
符
符
号
号
剩余59页未读,继续阅读
2023-02-26 上传
2023-05-26 上传
2023-05-26 上传
2023-03-21 上传
2023-03-30 上传
2023-05-29 上传

知识世界
- 粉丝: 366
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
