罗克韦尔自动化机器人摘取与放置解决方案解析
需积分: 5 142 浏览量
更新于2024-07-16
收藏 3.08MB PDF 举报
"罗克韦尔 机器人摘取和放置应用项目解决方案.pdf"
这篇文档是罗克韦尔自动化公司提供的一份关于机器人摘取和放置应用的项目解决方案,主要面向亚太地区的原始设备制造商(OEM)。文档的核心内容围绕Logix运动学、机器人操作模板、合作伙伴的参与以及具体的案例应用展开,旨在解决传统机器人应用中遇到的复杂性和成本问题。
1. **Logix运动学概述**
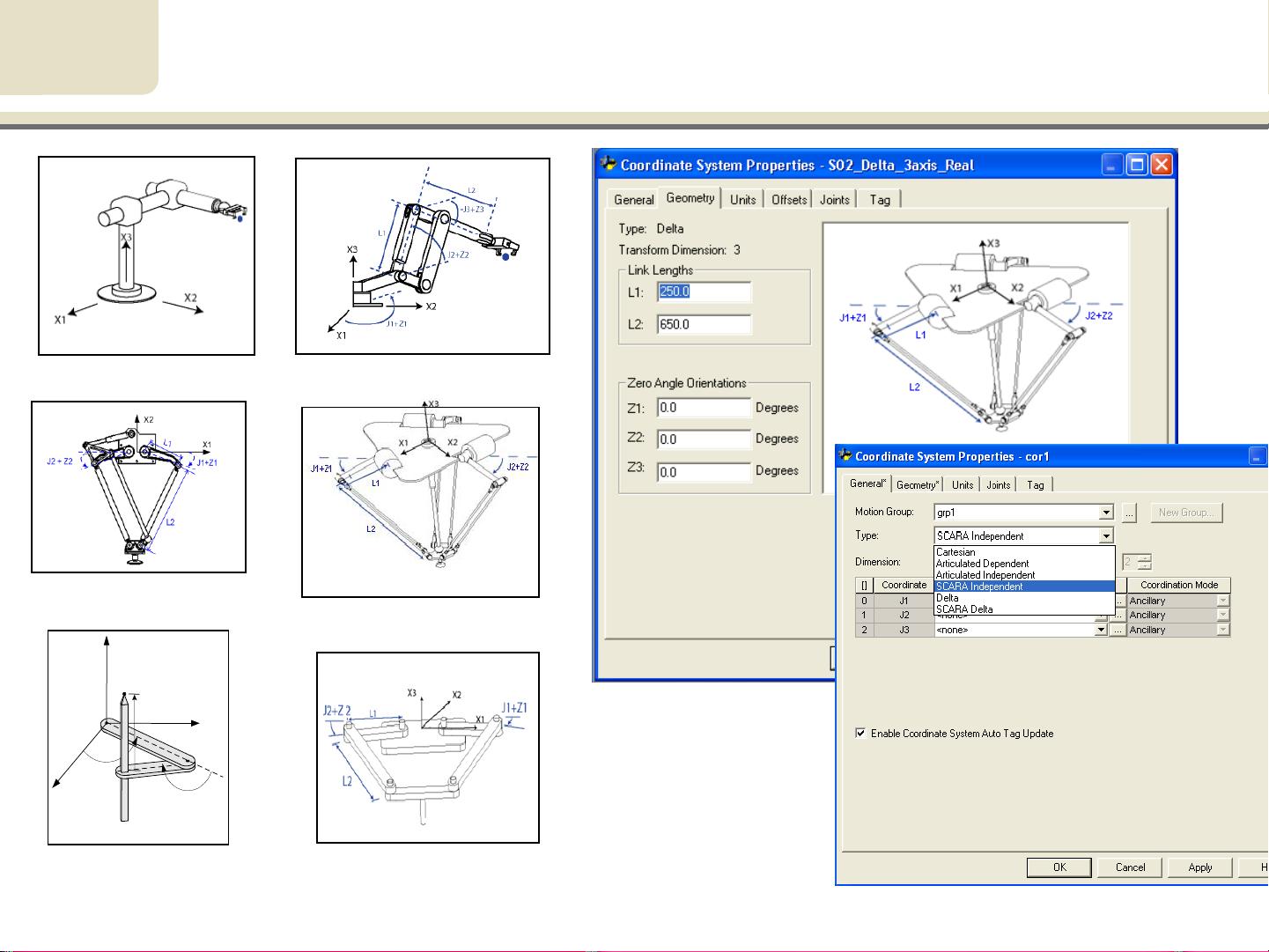
Logix 是罗克韦尔自动化公司的控制器平台,它支持多种运动类型,包括点对点(Pt-pt)、时间控制自动机器(TCAM)、齿轮/路径控制自动机器(PCAM)、直线和圆弧插补等。Logix 的运动学功能允许用户在笛卡尔坐标系下编程,将运动指令转换为关节空间,实现了逆向和正向运动学转换,简化了机器人路径规划和控制。
2. **机器人摘取和放置模板**
文档中提到了机器人摘取和放置的预定义模板,这可能是为了简化编程流程,减少用户的学习曲线和开发时间。通过模板,用户可以快速配置和实现常见的机器人操作,如抓取物体、移动到指定位置、释放物体等,提高项目的实施效率。
3. **包括的合作伙伴**
解决方案可能涉及与其他公司的合作,如视觉系统提供商、传感器制造商或网络技术供应商,以实现更集成的自动化解决方案。例如, EtherNet/IP、SERCOS、DeviceNet 等通信协议的提及,表明可能有第三方设备的集成,这些协议有助于实现不同组件之间的高效数据交换。
4. **应用实例**
文档中包含的应用实例部分可能详述了如何利用罗克韦尔自动化的产品和技术解决特定的工业问题。这些实例可能涵盖了不同行业的应用,比如汽车制造、电子装配或食品包装,展示了罗克韦尔自动化解决方案的实际效果和优势。
5. **传统问题与Logix解决方案**
在过去,机器人应用常常面临多个编程环境、额外的培训成本、复杂的同步逻辑、分散的数据管理以及不一致的硬件平台等问题。罗克韦尔自动化通过Logix控制系统,提供了一体化的解决方案,减少了额外的培训需求,简化了通信逻辑,实现了控制器和机器人控制器间的数据统一,降低了维护成本,并通过标准化硬件平台降低了复杂性。
总结起来,这份解决方案旨在通过罗克韦尔自动化先进的Logix平台,提供一个集成、高效且易于管理的机器人摘取和放置应用,解决传统方法中的挑战,提升自动化生产线的效率和灵活性。对于希望优化其机器人系统的OEM和工厂来说,这是一个宝贵的资源。
(机密 – 仅供内部使用) 版权 © 2009罗克韦尔自动化公司,保留所有权利
7
运动学几何形态
3 Arm Delta
Delta SCARA
Cartesian
Articulated
2 Arm Delta
SCARA
x
1
x
2
x
3
L
1
O
-J2
J1
J3
L
2

剩余39页未读,继续阅读
2019-09-16 上传
2019-10-16 上传
2019-09-15 上传
2019-11-01 上传
2019-10-17 上传
2019-09-14 上传
2019-10-16 上传

weixin_38743602
- 粉丝: 396
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







