智能网联汽车的先进驾驶辅助系统解析
需积分: 17 141 浏览量
更新于2024-07-07
收藏 24.86MB PPTX 举报
该资源是关于智能网联汽车先进驾驶辅助系统的PPT介绍,涵盖了ADAS的主要组成部分,包括系统定义、类型以及多个具体的应用实例,如前向碰撞预警、车道偏离预警、盲区监测等。
正文:
智能网联汽车的先进驾驶辅助系统(ADAS)是现代汽车技术的重要组成部分,其目的是通过集成高科技来提高驾驶安全性,减少交通事故的发生。这些系统通过环境感知技术,如传感器和V2X通信,来检测周围环境,识别道路、车辆、行人和其他交通元素,然后进行分析处理,为驾驶员提供预警或直接干预车辆操作。
6.1先进驾驶辅助系统的定义与类型:
ADAS的核心在于其环境感知能力,它能对周围环境进行实时监测。根据感知方式,ADAS可分为两类:自主式和网联式。自主式ADAS依赖于车辆自身的传感器,如雷达、摄像头等,进行环境感知和决策。这一技术已相对成熟,在许多量产车上得到应用。网联式ADAS则利用V2X(Vehicle-to-Everything)通信,结合云端数据进行环境感知和决策,目前还在研发和试验阶段。
6.2前向碰撞预警系统(FCW):
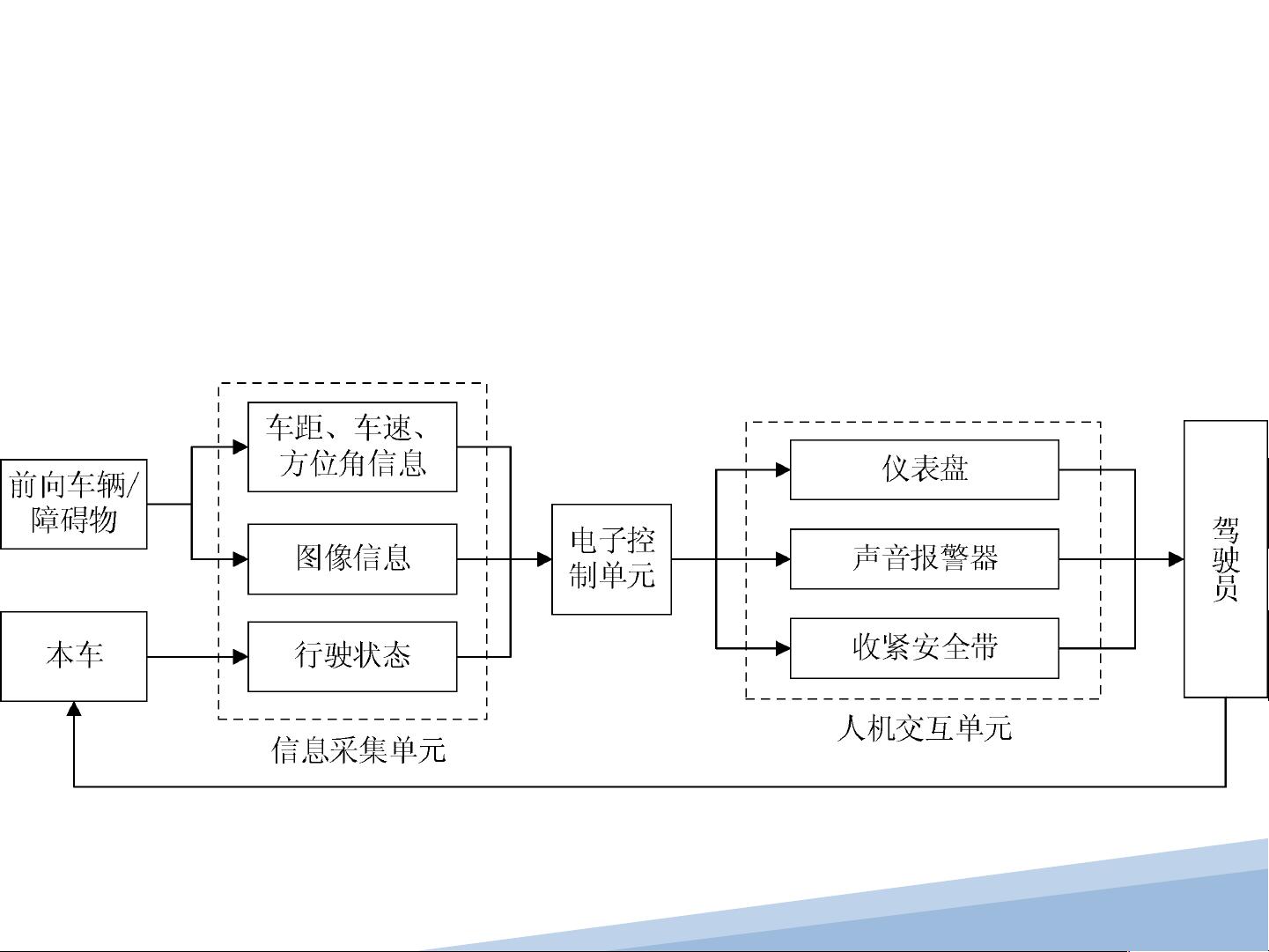
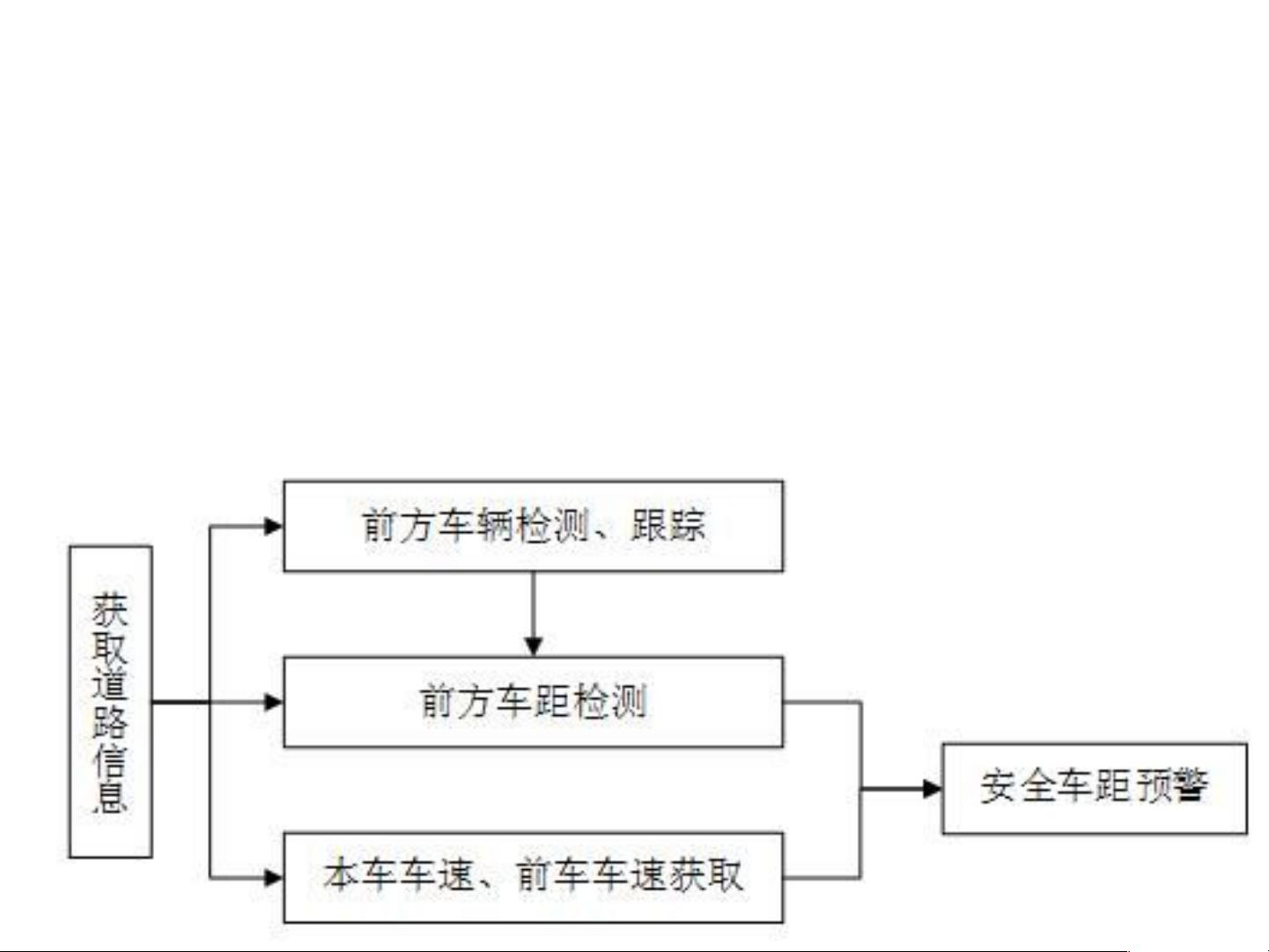
FCW系统是ADAS中的一个重要子系统,通过雷达或视觉传感器监测前方车辆,计算两车的距离、方位和相对速度。当预测到可能发生碰撞时,系统会向驾驶员发出警告。FCW系统通常包括信息采集(传感器)、电子控制和人机交互三个部分。系统工作时,首先识别和跟踪前方车辆,然后测量车距,结合车速估计来判断追尾风险,一旦达到预设的危险阈值,系统即发出预警。
6.2.2 FCW系统的工作原理:
1. 前方车辆识别:通过雷达、摄像头等传感器实时捕获前方道路图像,识别出其他车辆。
2. 前方车距检测:利用超声波、毫米波雷达、激光雷达或视觉传感器持续检测与前车的距离,将数据传送给电子控制单元。
3. 安全车距预警模型:根据车辆速度和制动性能,设定一个安全的最小跟车距离,如果实际车距低于这个阈值,系统就会启动预警。
此外,PPT还提到了其他几种重要的ADAS系统,如车道偏离预警系统(LDW),用于提醒驾驶员车辆偏离当前车道;盲区监测系统(BSD),帮助驾驶员监控视线盲区的车辆;驾驶员疲劳预警系统(DMS),检测驾驶员的疲劳状态;车道保持辅助系统(LKA),在车辆偏离车道时自动介入修正;自动制动辅助系统(AEB),能在紧急情况下自动刹车;自适应巡航控制系统(ACC),可根据前方车辆自动调整车速;自动泊车辅助系统(APA),帮助驾驶员轻松泊车;自适应前照明系统(AFS),根据驾驶条件调整大灯角度;夜视辅助系统(NVIS),提高夜间行驶的可视性;平视显示系统(HUD),在驾驶员视野内显示关键信息,减少视线转移。
这些系统共同构成了智能网联汽车的安全屏障,随着技术的进步,它们将更加智能化,更好地服务于驾驶者,提升行车安全。未来,自主式与网联式技术的融合将是ADAS发展的关键趋势。
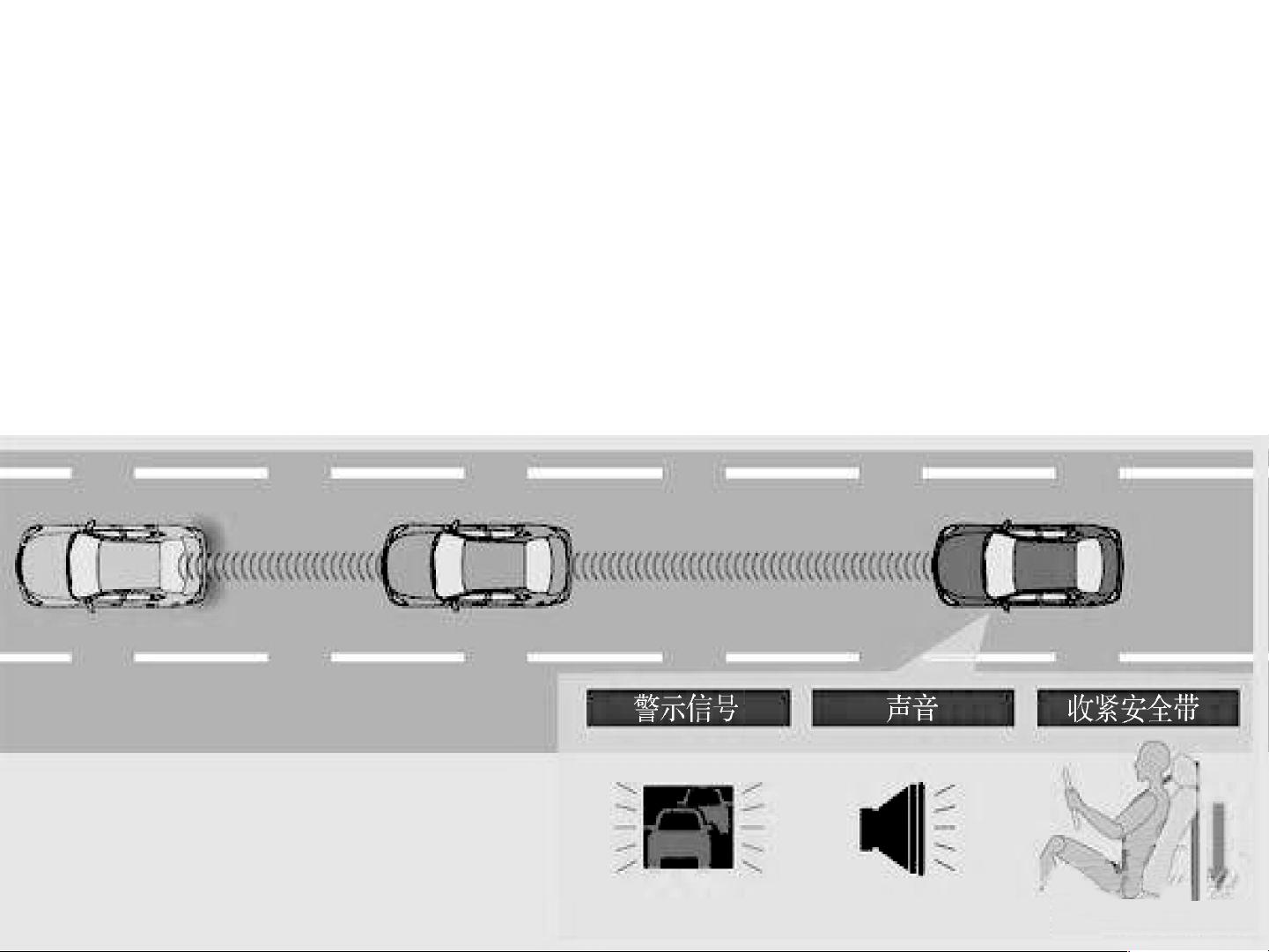
6.2 前向碰撞预警系统——定义
前向碰撞预警( FCW )系统通过雷达或视觉传感器时刻监
测前方车辆,判断本车与前车之间的距离、方位及相对速度,
当存在潜在碰撞危险时对驾驶员进行警告
剩余63页未读,继续阅读
2023-06-01 上传
2019-12-11 上传
2024-01-10 上传
2023-05-14 上传
2023-07-16 上传
2023-07-30 上传
2023-06-13 上传
2023-03-11 上传
2023-06-22 上传

color_blue
- 粉丝: 1
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
