舵机控制深度解析:PWM信号与调速算法详解
需积分: 10 132 浏览量
更新于2024-07-26
收藏 5.89MB DOC 举报
舵机控制原理是一门关键的工程技术,它涉及到电机驱动和精密定位在许多领域中的应用,如机器人技术、无人机、模型飞机等。本文将深入探讨舵机控制的核心要素,包括PWM信号的原理及其在舵机中的作用。
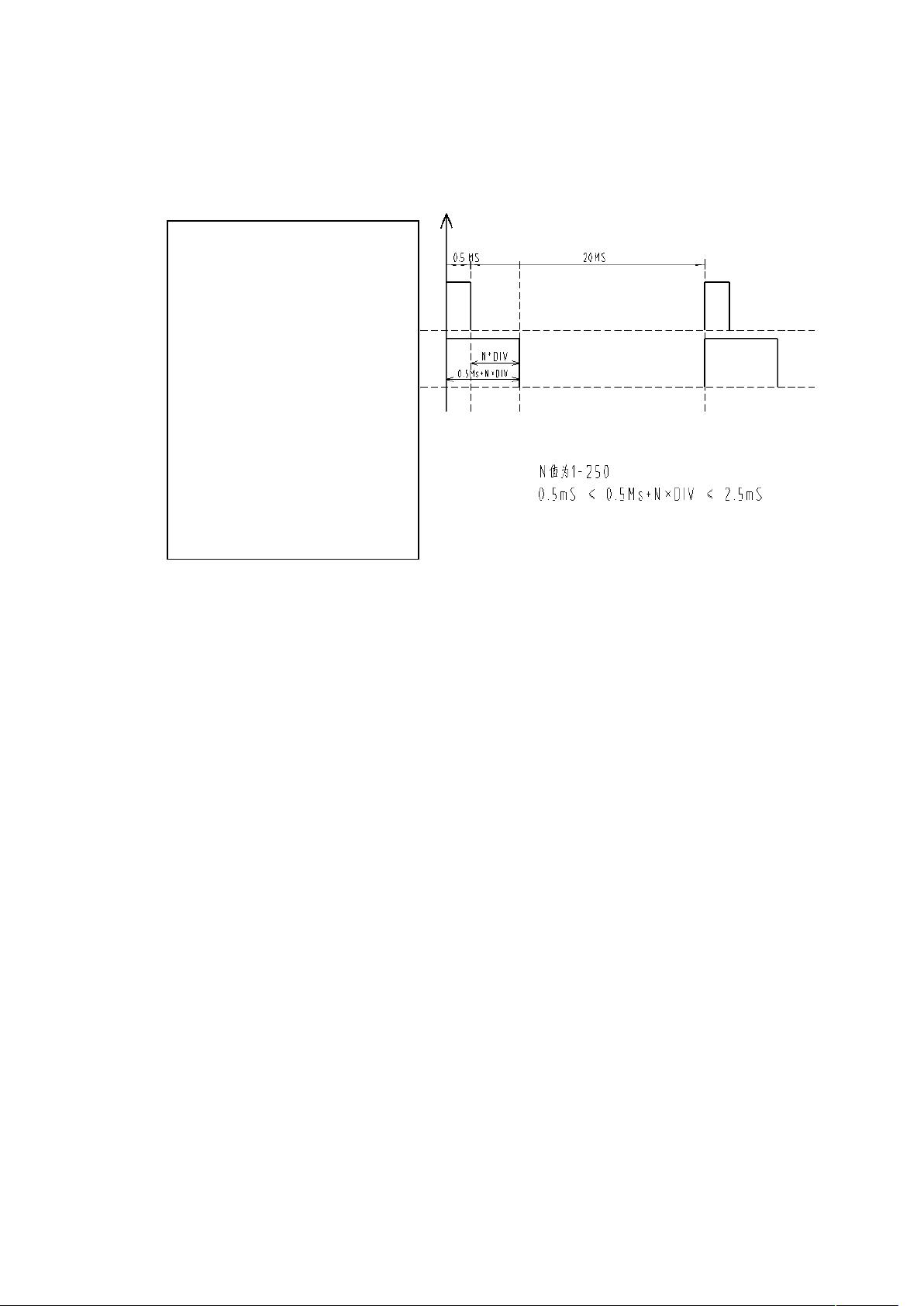
PWM信号,即脉宽调制信号,是通过调整信号占空比来实现电压或电流的模拟。这种信号控制精度高,能够精确控制舵机的转动速度和角度。在舵机中,上升沿的最小时间为0.5毫秒,持续时间范围在0.5毫秒至2.5毫秒之间,而下降沿时间则较为灵活,如HG14-M数字舵机通常使用0.5毫秒作为标准。这意味着,通过调整PWM的周期,可以精确地控制舵机的响应速度。
单舵机拖动及调速算法是舵机控制的核心部分。例如,HG14-M舵机采用了位置控制方法,其运动协议设计考虑到舵机的追随特性和ω值(角速度)测定。通过双摆试验,可以验证舵机的性能并确定合适的调速策略。同时,定义了DAV(Dead Angle Voltage,死区电压)和DIV(Division,细分),这两个参数对于设定 PWM 脉冲宽度以实现精确的转速控制至关重要。
当涉及到多舵机联动时,如8舵机的单周期PWM指令算法,控制要求更加细致。算法需要考虑如何协调各舵机的动作,确保在单个PWM周期内完成所有舵机的指令。注意事项包括合理安排PWM信号的顺序、使用N排序子程序和N差子程序来处理复杂的同步问题,并且需要解决扫尾问题,即最后阶段舵机动作的平滑收尾。扫尾值的计算涉及到对PWM信号的精细调整,以确保整个动作序列的连贯性。
舵机控制原理涉及从基本的PWM信号设计到复杂的多舵机协同工作的算法设计,每个环节都需要精确计算和精心调试,以实现高效、稳定的机械操作。理解并掌握这些原理和技术,对于开发和维护高性能的机器人系统以及无人机控制系统具有重要意义。
2.PWM 信号控制精度制定
1 DIV = 8uS ; 250DIV=2mS
时基寄存器内的数值为:(#01H)01 ----(#0FAH)250。
共 185 度,分为 250 个位置,每个位置叫 1DIV。
则:185÷250 = 0.74 度 / DIV
PWM 上升沿函数: 0.5mS + N×DIV
0uS ≤ N×DIV ≤ 2mS
0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS
3 / 17
3
图
1-
2
我 们 采 用 的 是 8 位
AT89C52CPU,其数据分辨率为
256,那么经过舵机极限参数实
验,得到应该将其划分为 250 份。
那么 0.5mS---2.5Ms 的宽
度为 2mS = 2000uS。
2000uS÷250=8uS
则:PWM 的控制精度为 8us
我们可以以 8uS 为单位递
增控制舵机转动与定位。
舵机可以转动 185 度,那
么 185 度÷250=0.74 度,
则:舵机的控制精度为 0.74 度
剩余16页未读,继续阅读
2009-08-17 上传
2010-05-29 上传
2011-04-08 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-11-29 上传
2023-09-17 上传

hpuyanjing
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
