基于弹幕视觉的车轮定位技术研究与应用
需积分: 9 78 浏览量
更新于2024-07-18
收藏 2.53MB PDF 举报
"基于机器视觉的汽车四轮定位技术研究"
这篇硕士研究生学位论文主要探讨了利用机器视觉技术进行汽车四轮定位的问题。在研究中,作者首先详细介绍了相机标定的过程,基于张正友相机标定法,利用OpenCV库进行图像处理,通过计算单应性矩阵获取相机的内参和畸变参数。这一过程是机器视觉应用的基础,确保了后续图像分析的准确性。
在车轮定位技术方面,论文提出了基于单目视觉的解决方案,该方案由图像采集和数据处理两部分组成。图像采集阶段涉及对车辆车轮的实时捕捉,而数据处理阶段则包括一系列图像预处理技术,如图像二值化、高斯平滑滤波、图像分割,以及采用广义Hough变换来检测和提取车轮的圆心坐标。这些步骤对于识别车轮位置至关重要。
在定位参数计算中,论文提到了矩阵奇异值分解(SVD)和最小二乘法的结合应用,用于解决目标靶位姿的计算问题。这种方法能够有效地处理由测量噪声引起的不确定性,提高定位精度。
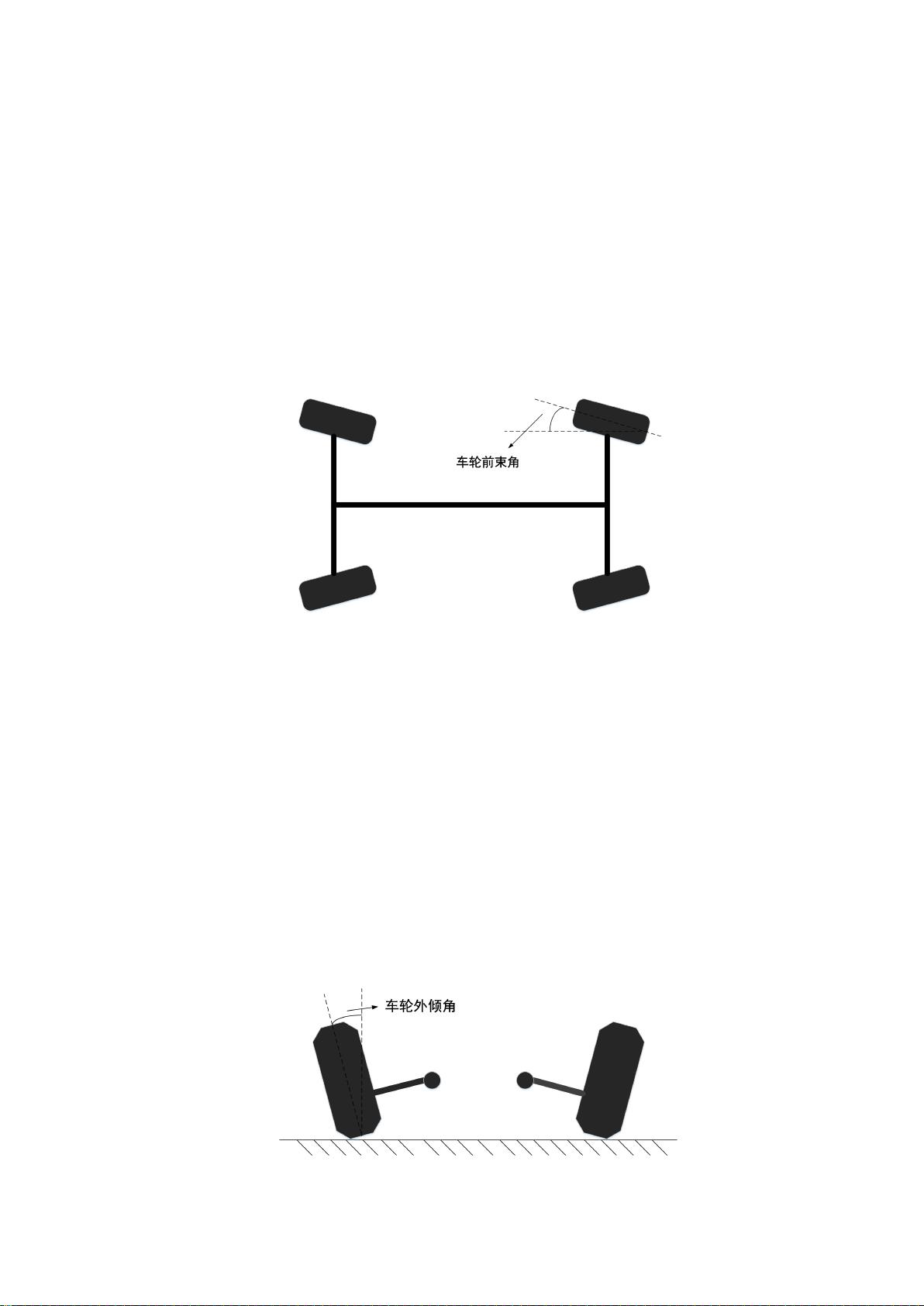
最后,论文采用了空间向量法构建计算模型,以确定车轮的相关参数,如车轮角度和轴距等,这对于精确调整四轮定位至关重要。这种方法不仅简化了传统四轮定位仪的复杂性,还降低了测量误差,提高了设备的可维护性和测量速度。
论文还指出,尽管基于机器视觉的四轮定位仪已成为市场的主流,但其高昂的价格限制了更广泛的应用。因此,作者的研究旨在在保证技术先进性和精度的同时,寻求成本更为经济的解决方案,特别是基于双目视觉技术的四轮定位技术,以期在性能和价格之间找到一个平衡点。
这篇论文深入研究了机器视觉在汽车四轮定位中的应用,涵盖了相机标定、图像处理算法、位姿计算方法以及实际的计算模型,为实现高效、准确且经济的四轮定位提供了理论和技术支持。

4
3D
式四轮定位采用先进的视觉测量技术,具有定位速度快,精度高等特点,在汽
车越来越普及的情形下,应用空间也越来越大。当前主流的车轮定位仪主要是基于双目
视觉测量系统的,虽然有着检测速递快,检测精度高的优点,但是双目视觉测量设备价
格昂贵,并且在软件实现上算法复杂度较高。因此本文在对当前以机器视觉为技术手段
的四轮定位算法进行研究的基础上,研究了以单目视觉为技术基础的车轮定位技术,完
成了从硬件选型,硬件平台搭建到目标版图像采集,图像预处理,相机标定,目标板位
姿参数求取,车轮位置参数计算等一系列工作。
论文的结构安排如下:
第一章 首先阐述课题研究的背景和意义,然后介绍国内外基于机器视觉的车轮定
位仪的研究现状,阐述了当前市场上主流的四轮定位仪的优缺点,提出了以单目视觉技
术为基础的车轮定位方案,最后确定了本文的研究内容以及本文结构框架。
第二章 本章是对基于机器视觉技术的 3D 四轮定位测量算法的研究,包括空间中刚
体运动的特性,坐标变换关系,旋转矩阵的求取,空间向量法测量模型和基于透视学原
理的测量模型。
第三章 本章研究了相机标定技术。首先阐述相机的成像模型及进行相机标定的重
要性,然后阐述常用的相机标定方法,并详细论述了张氏相机标定法,最后结合
OpenCV
进行相机标定,获得了相机的实际内参和畸变参数。
第四章 本章研究了单目视觉车轮定位技术。依据前面章节所述方法,设计了基于
空间向量法的四轮定位技术方案,将其分为图像采集和数据处理两个部分。图像采集部
分,完成硬件选型并进行相应介绍;数据处理又包含图像预处理和数据后期处理两个部
分,介绍了相关的图像预处理方法并完成了相应的实验,最后建立车轮定位参数计算模
型,带入数据计算得到定位参数并对结果加以分析。
第五章 总结全文,并对以后的研究进行展望。

剩余67页未读,继续阅读
2021-11-18 上传
2023-05-12 上传
2023-03-26 上传
2023-12-28 上传
2023-06-12 上传
2023-06-02 上传
2023-04-02 上传
2023-06-12 上传

头顶一朵小蘑菇
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 最优条件下三次B样条小波边缘检测算子研究
- 深入解析:wav文件格式结构
- JIRA系统配置指南:代理与SSL设置
- 入门必备:电阻电容识别全解析
- U盘制作启动盘:详细教程解决无光驱装系统难题
- Eclipse快捷键大全:提升开发效率的必备秘籍
- C++ Primer Plus中文版:深入学习C++编程必备
- Eclipse常用快捷键汇总与操作指南
- JavaScript作用域解析与面向对象基础
- 软通动力Java笔试题解析
- 自定义标签配置与使用指南
- Android Intent深度解析:组件通信与广播机制
- 增强MyEclipse代码提示功能设置教程
- x86下VMware环境中Openwrt编译与LuCI集成指南
- S3C2440A嵌入式终端电源管理系统设计探讨
- Intel DTCP-IP技术在数字家庭中的内容保护
