视觉惯性里程计数据集:现实世界挑战与公开基准
34 浏览量
更新于2024-06-20
收藏 2.01MB PDF 举报
视觉-惯性里程计(Visual-Inertial Odometry, VIO)是一种结合了视觉传感器(如摄像头)和惯性测量单元(Inertial Measurement Unit, IMU)的先进技术,用于精确追踪移动设备(如智能手机、平板电脑或增强现实设备)在三维空间中的位置和运动。当前,由于缺乏全面且开放的真实世界基准数据集,评估不同VIO算法性能和改进方法变得困难。
为了填补这一空白,ADVIO项目由Santiago Cortés、Arno Solin、Esa Rahtu和Juho Kannala等研究人员合作开发,他们分别来自芬兰埃斯波阿尔托大学计算机科学系和坦佩雷理工大学。他们的目标是创建一个通用且具有挑战性的视觉惯性里程计基准,以便科学家和工程师能够在实际场景下比较和优化算法。
这个项目的关键贡献在于构建了一个包含多种设备的数据集,如iPhone、Google Pixel、Google Tango和Apple ARKit,涵盖了不同的应用场景,包括室内(如办公室、购物中心)和室外(如楼梯、自动扶梯、电梯和地铁站)。数据集提供丰富的原始传感器数据,包括视频、加速度计和陀螺仪数据,这使得研究者能够研究和评估VIO算法在复杂环境下的鲁棒性和精度。
特别地,数据集不仅包括了基于摄像头的视觉信息,还提供了通过ARCore和ARKit实现的视觉惯性跟踪结果,以及Google Tango提供的原始姿势估计、区域学习姿势、鱼眼视频和点云数据。这种多样性有助于分析VIO技术在不同硬件平台和应用场景下的表现,并推动算法的进一步发展。
ADVIO数据集为视觉-惯性里程计的研究者提供了一个宝贵的资源,促进了该领域内方法的评估和创新,推动了移动设备在定位、导航和增强现实应用中的性能提升。通过共享这个开放源码的数据集,研究者们可以更有效地进行实验和基准测试,从而推进视觉惯性技术的整体进步。
4
科尔特斯、索林、拉赫图和卡
纳拉
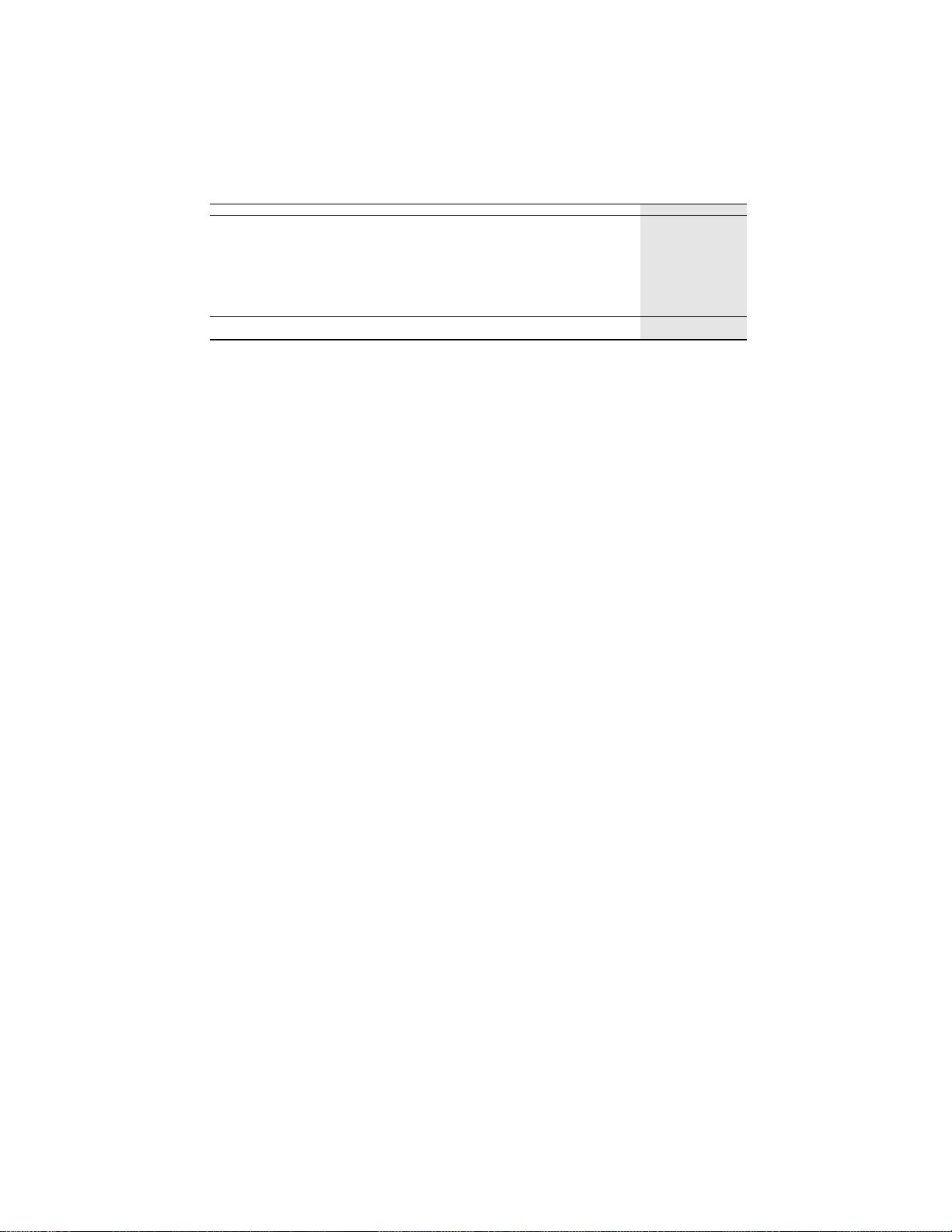
表
1.
相关数据集的概述。
种子[5]
KITTI
[10]
NCLT
[4]
欧洲
RoC
[3]
PennCOSYVIO
[18]
提出
年
2006
2012
2015
2016
2017
(this纸张)
载体
轮式机器人
车
赛格威
MAV
手持设备
手持设备
环境
室内/室外
户外
室内/室外
室内
室内/室外
室内/室外
场景设置
校园规模
城市规模
校园规模
2个房间
校园内150米的小路
3栋建筑
(行走4次)
+ 室外场景
硬件设置距离
(总计)
3D点云
自定义
10公里
J
-
自定义
39公里
J
J
自定义
147公里
J
J
自定义
800米
-
J
自定义
600米
J
-
标准智能手机
4.5公里
J
J
地面实况
GPS/视觉标签
GPS/IMU
GPS/IMU/激光
MoCap/激光
视觉标签
IMU+定位
精度
维姆
dm
dm
普拉姆
dm
dm-m
2
相关工作
尽管视觉惯性里程计(VIO)是用于手持和可穿戴设备的实时跟踪的
最有前途的方法之一,但是缺乏用于对不同方法进行基准测试的良好
的公共数据集。相关基准应包括视频和惯性传感器记录,其具有优选
地用消费级智能电话传感器捕获的同步时间戳。此外,数据集应该是
真实的,并说明现实的用例。也就是说,它应该包含具有稀缺视觉特
征的挑战性环境,室内和室外,以及变化的运动,还包括没有平移的
快速旋转,因为它们对于单目视觉测距是有问题我们的工作是解决这
一需求的第一项工作。
关于纯视觉里程计或SLAM,有几个可用的数据集和基准[23,6,
8,26],但它们缺乏惯性传感器数据。此外,这些数据集中的许多数
据集是有限的,因为它们
(
a
)
使用地面车辆记录并且因此不具有快
速旋转[23,6],
(
b
)
不包含低纹理室内场景[23,6],
(
c
)
用定制
硬件(
例如:鱼眼
镜头或全局快门相机)[8],
(
d
)
缺乏全6自由度地
面实况[8],或
(
e
)
受限于小环境,因此对于SLAM系统是理想的,
但不适合用于中远程导航的基准测距[26]。
然而,除了纯视觉数据集之外,还有一些包含惯性传感器数据的公共
数据集,例如[10,5,4,3,18]。这些数据集中的大多数都是用固定在
轮式地面车辆上的传感器记录的。例如,广泛使用的KITTI数据集[10]包
含来自移动汽车的多个摄像机的LIDAR扫描和视频。使用具有RTK校正
信号的非常精确的GPS/IMU定位单元获得地面实况。然而,IMU数据仅
以10Hz的频率捕获,这将不足以跟踪快速移动的手持设备。此外,即使
高频IMU数据可用,KITTI也具有 上述约束
(
a
)
、
(
b
)
和
(
c
)
,这
限制了其对于智能电话里程计的有用性。
KITTI的另一个类似之处是,我们也使用纯惯性导航与外部位置固
定来确定地面实况。在我们的情况下,GPS定位被替换为手动位置定
位,因为GPS不可用或可用。
剩余15页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-01-06 上传
2022-04-22 上传
2022-09-02 上传
2024-06-24 上传
2023-09-17 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
