飞思卡尔算法详解:电机与图象采集控制策略
需积分: 9 190 浏览量
更新于2024-07-22
1
收藏 5.34MB PDF 举报
飞思卡尔算法是一套针对智能车辆设计的综合控制方案,主要集中在电机控制和图像采集处理两方面。该算法的核心内容涵盖了以下几个关键知识点:
1. **电机控制**:
- **直流电机控制策略**:文章详细探讨了直流电机的控制方法,包括弯道速度控制和直道速度控制,强调了PID闭环控制算法的应用,这种算法是一种常见的工业控制技术,用于稳定电机输出,确保车辆动力响应。
- **反向制动算法**:通过此算法,车辆能在减速或停止时实现平稳过渡,减少能耗。
- **速度控制策略**:涉及速度PID算法,这是一种自适应控制策略,可以根据车辆状态实时调整电机驱动,确保速度准确控制。
- **直流驱动电机控制子程序**:这部分提供了实际编程实现的关键代码,以实现电机的精确控制。
- **舵机控制**:包括舵机转角决策、偏航距离计算、参数测定以及路径规划,确保车辆方向的精准调整。
2. **图像采集与处理**:
- **图象采集**:介绍图像采集的过程,以及如何减少干扰和反光的影响。
- **图像抗干扰处理**:算法着重于提高图像质量,减少噪声和环境因素对识别的干扰。
- **图像滤波**:通过滤波技术,增强图像细节,便于后续的路径识别。
- **路径识别**:涉及多种识别方法,如阈值计算和CCD路径识别,以确定车辆行驶的路径。
- **图相采集与数据处理**:将图像数据与车辆运动数据结合起来,实现更精确的速度控制。
3. **硬件模块**:
- **摄像头**:介绍了摄像头的结构、工作原理,以及选型原则,如CMOS摄像头的选择。
- **视频分离模块**:LM1881视频分离模块在图像采集中的作用,帮助处理视频信号。
- **图像处理与路径识别算法**:这部分涉及具体的硬件接口设计和软件算法集成,以实现图像信号到路径信息的转换。
飞思卡尔算法的这些内容共同构建了一个完整的智能车辆控制系统,旨在优化车辆的动态性能和路径导航能力,确保在各种行驶条件下都能稳定、高效地运行。
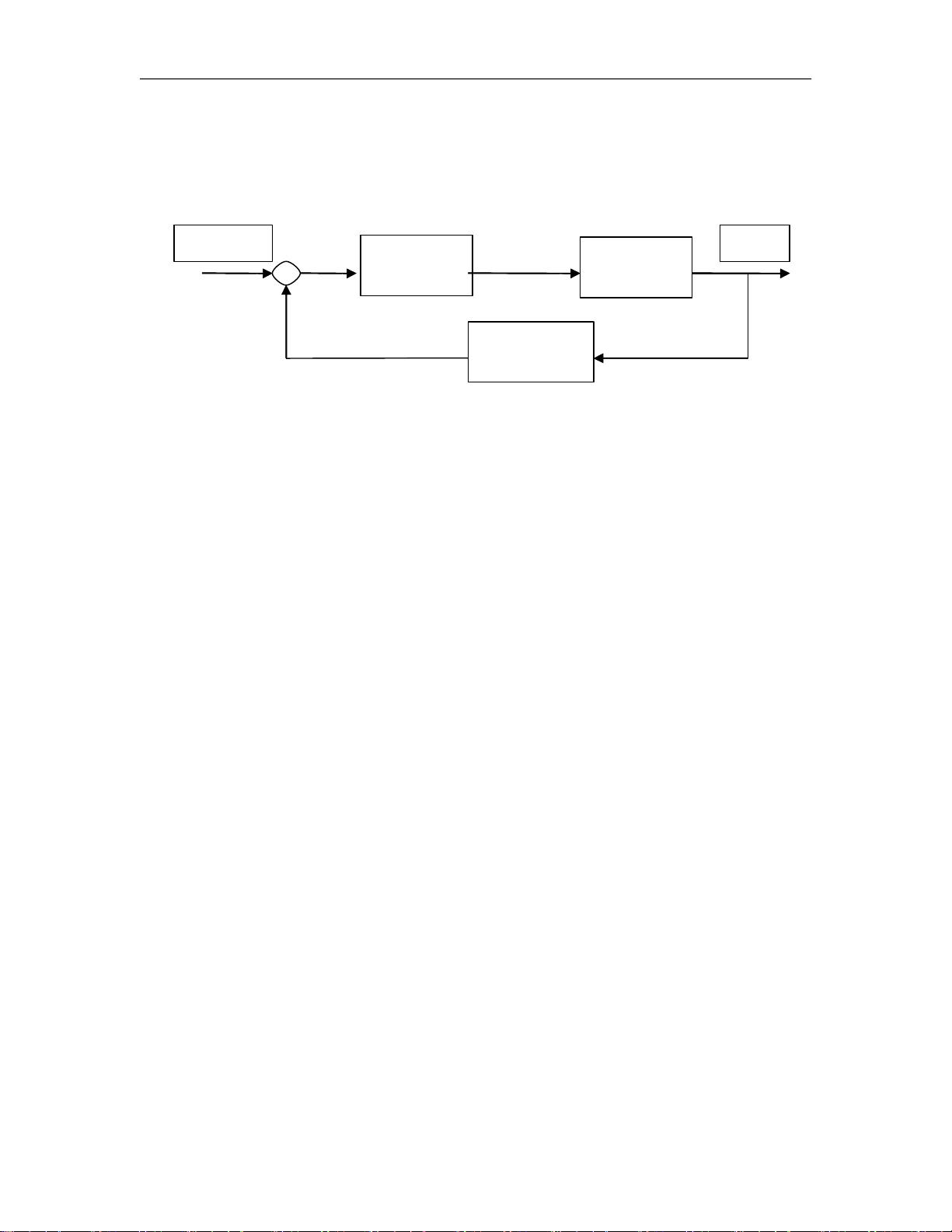
电机调速
本作品采用增量式的 PI 控制。
图 4.12 增量式 PI 算
法:
pwm=Kp*(errork0-errork1)/100+Ki*errork0/100+pwm;
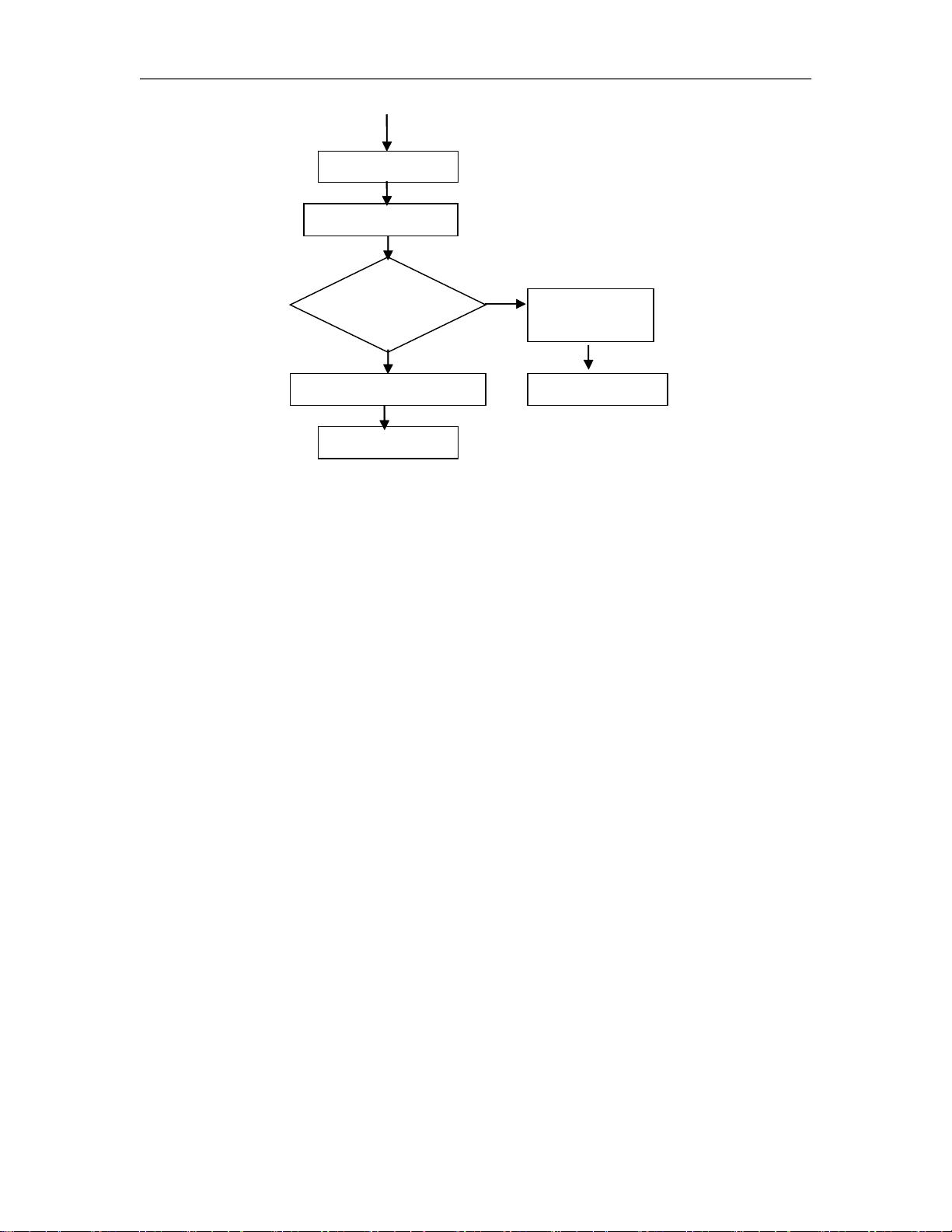
1.5.直流驱动电机控制子程序
本设计通过调整方波的占空比来实现电机的调速。经过初始化子程序的设置,
PWM0 和 PWM5 都能输出频率为 5KHz 的方波。由硬件部分可知,PWM0 产生的方波经
MC33886 功率放大后接到电机的负极,PWM5 产生的方波经 MC33886 功率放大后接到
电机的正极。车模向前行驶时,PWM0 输出方波的占空比为零,通过调整 PWM5 输出
方波的占空比实现加速或缓慢减速。当需要快速减速时,PWM5 输出方波的占空比为
零,PWM0 输出方波的占空比为合适的值,电机反转实现车模制动。该部分程序工作
流程图如图 4.7 所示。
增量式
PI
调
节
set_value
电机
输出
测速检测

剩余69页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-04-07 上传
2015-11-26 上传
2011-03-06 上传
2011-11-05 上传
2013-01-14 上传

linlih
- 粉丝: 11
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







