飞思卡尔算法:PID与鲁棒控制的智能车速度与弯道策略
需积分: 10 184 浏览量
更新于2024-07-23
3
收藏 1.58MB DOC 举报
飞思卡尔算法是一套针对智能车辆特别是模型车设计的电机控制策略,它着重于解决车体速度控制的问题,特别是在大惯性系统中。由于车体速度受到电机输出力、负载、电池电量和车重等因素的影响,传统的开环控制难以实现精确且稳定的车速控制。因此,采用闭环控制方式,如PID(比例-积分-微分)控制算法,结合鲁棒控制思想,能够在短时间内有效调整电机输出,确保车速稳定。
PID控制器在飞思卡尔算法中的应用主要体现在速度跟踪上。公式1-1所示的PID公式中,积分项、比例项和微分项分别对应着控制策略的不同组成部分,积分项用于补偿系统长期积累的误差,比例项直接响应误差,而微分项则通过预测未来误差趋势来快速调整。由于模型车系统的特性,积分项可能被简化,仅保留比例和微分项,形成PD控制。
在弯道控制方面,飞思卡尔算法更显精细。模型车在入弯时,为了保证稳定性,会根据直道速度设定值进行减速,具体操作是将速度设定值降低至低速挡。进入弯道后,为了减少左右摆动,速度设定值与车体偏离理想轨迹的偏差成线性关系,偏差越大,速度越应减小。公式1-2给出了这一关系的具体表达,其中包含了速度闭环设定值、全程平均速度设定值、当前偏差值以及一个减速控制比例系数,这些参数的精确调整对于维持模型车在弯道上的稳定性和性能至关重要。
飞思卡尔算法通过优化电机控制策略,确保了智能车在各种情况下的速度控制能力,包括初始启动、匀速行驶和弯道行驶,从而提高了模型车在比赛中的整体表现。这对于智能车尤其是模型车领域的初学者来说,提供了宝贵的学习资源和实践指导,强调了算法在实际应用中的核心地位。
第五章 智能汽车软件设计
80~100cm。
黑线中心位置轨迹中包含着两方面的信息,一方面是反映前方道路趋势的信息 ,
另一方面是反映车体与轨道偏离程度的信息。经过反复试验,我们发现,前者可以
通过计算黑线的斜率来很好的描述。而后者,恰恰就是屏幕最下端黑线的位置。最
后用这二者的线性组合得到舵机转角。有了这两方面信息,可以使智能车既能充分
利用前瞻性,又能不过分地偏离轨道。从而得到了较理想的转角控制策略解决方案。
1.6.2. 偏航距离的计算
由于已经获得了赛道中心线的位置,所以计算偏航距离的问题是选取何处的中
心线的距离为当前的偏航距离。控制算法的执行周期为 40ms,如果赛车的速度为
2m/s,则在两次控制算法的执行中间,赛车要前进 8cm,赛车所处的环境将发生比
较大的改变,所以赛车的控制只能算是半实时控制,这是所有使用摄像头作为主要
寻线传感器的参赛队都避免不了的问题。因为算法的滞后性,赛车需要将“当前位
置”进行适当前移。前移量应该跟赛车当前速度成正比,但实际中我们发现,适当
增加一些前移距离是有好处的,因为可以在入弯处提前转弯,使得赛车沿弯道内侧
行驶,缩短了过弯距离。
1.6.3. 舵机参数测定
通过实验测出已安装在模型车上的舵机的中位值(),
模型车转向轮左右极限时舵机( !、"#$)值是舵机控制
的基础。
测试舵机中位时,先在舵机控制模块中给舵机设计一个全局变量
(%&),将赛车放在长直道上,保证车身放正并处于赛道正中间,利
用'(查看此时%&的值,将此值直接赋给舵机,并将赛车放到直
道上跑,看是否跑偏,微调%&的值,直到赛车在直道上不再跑偏为止。
测定舵机左右极限时,可根据转向轮的左右极限转角,利用'(查看舵机
!和"#$的值。注意转向轮在左右极限转角时,转向轮不可被赛
车底盘卡住,这样不但会增加转向阻力,严重时还可能使转向轮抱死,失去转向能
力。
舵机的计算公式为:
%&)*+ !,"#$-.
"&/#0&123"4566公式四
式中"&/#0&1为每行采集的点数,
3"为黑线在整幅图像中的位置。
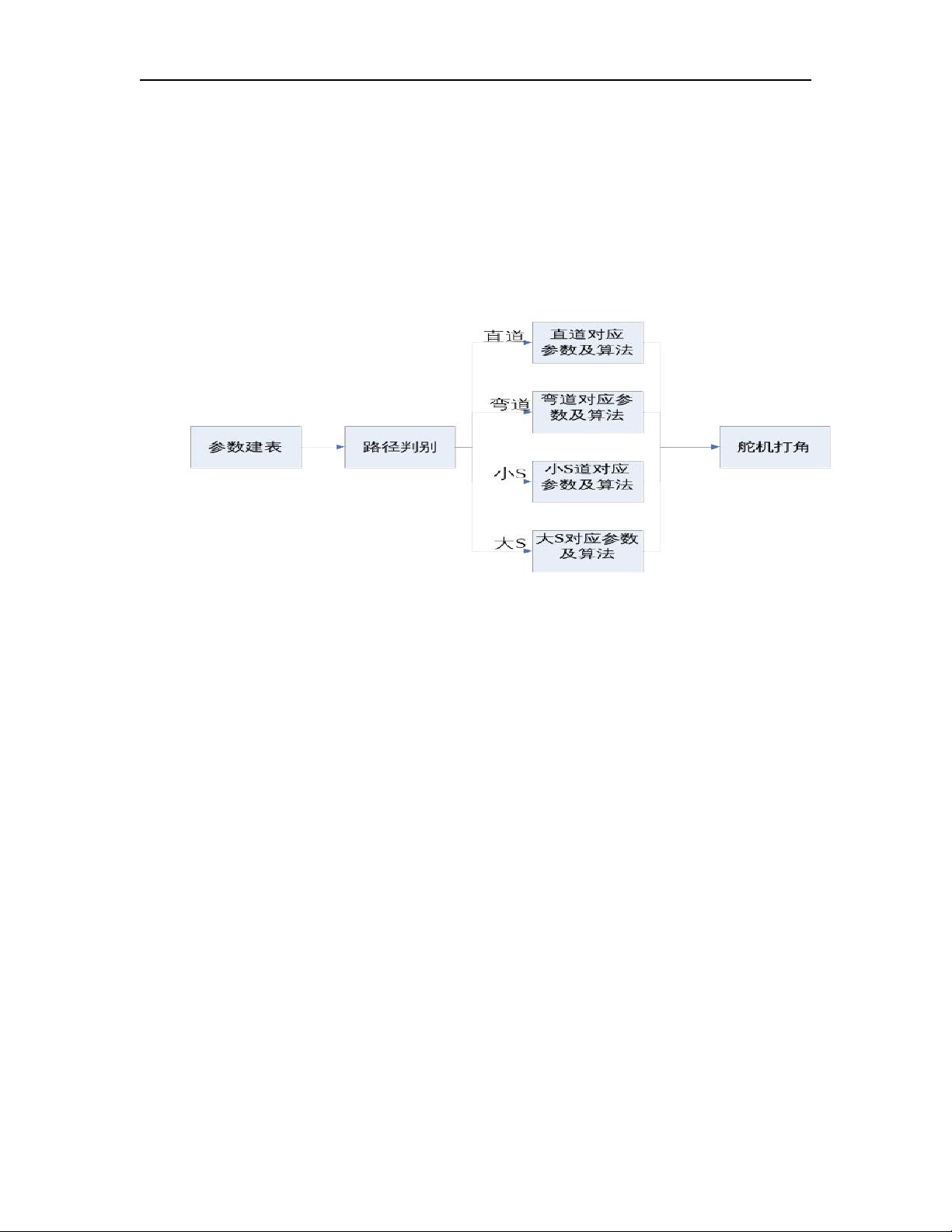
1.6.4. 路径规划
要想以最短的时间完成比赛,并不需要严格按照黑色引导线行驶,我们需要找
出相对较短的行驶路径,即路径规划。例如 过普通弯道的时候,以同样的速度走
剩余63页未读,继续阅读
点击了解资源详情
138 浏览量
点击了解资源详情
276 浏览量
162 浏览量
157 浏览量
162 浏览量
130 浏览量

l开膛手杰克l
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
