飞思卡尔算法:闭环控制与弯道策略优化
需积分: 9 26 浏览量
更新于2024-07-20
收藏 1.58MB DOC 举报
飞思卡尔算法在电机控制中的应用主要关注于智能车的动力系统优化,特别是针对直流电机的大惯性特点进行速度控制。智能车作为具有大惯性的被控对象,其速度控制策略至关重要,因为它直接影响赛车的比赛性能。本文的核心是采用PID(比例-积分-微分)控制法,结合鲁棒控制思想,以确保在各种条件下的稳定性和快速响应。
PID控制器是通过调整电机的输出力来实现车体速度的闭环控制。PID控制公式中,比例项(P1)确保实时误差的修正,积分项(第一项,通常省略因为车体速度是积分环节)用于消除长期积累误差,微分项(P3)则用于预测和补偿系统的动态变化。当误差超出预设阈值时,采用鲁棒控制策略,即增大输出以快速减小误差至可接受范围,提高了系统的抗扰动能力。
在处理弯道速度控制时,策略更为精细。入弯时,为了保持模型车的稳定性,会采取减速控制,通过降低速度设定值,比如公式1-2所示,这是对理想速度的一次线性减小,与车辆当前的偏移成比例,确保安全入弯。入弯后的速度控制则是为了减少模型车在弯道上的侧向摇摆,使它能以更平稳的姿态通过,这涉及到对偏差的敏感反应,偏差越大,速度设定值调整得越小。
此外,速度闭环设定值([pic])、全程运动平均速度设定值([pic])以及减速控制比例系数([pic])都是设计中的关键参数,它们共同作用于控制算法中,确保了在不同驾驶阶段,模型车都能以最佳速度和姿态运行。通过不断的实验和优化,这种飞思卡尔算法能够有效地提升模型车在赛道上的表现,从而在模型车比赛中取得优异成绩。

第五章 智能汽车软件设计
80~100cm。
黑线中心位置轨迹中包含着两方面的信息,一方面是反映前方道路趋势的信息 ,
另一方面是反映车体与轨道偏离程度的信息。经过反复试验,我们发现,前者可以
通过计算黑线的斜率来很好的描述。而后者,恰恰就是屏幕最下端黑线的位置。最
后用这二者的线性组合得到舵机转角。有了这两方面信息,可以使智能车既能充分
利用前瞻性,又能不过分地偏离轨道。从而得到了较理想的转角控制策略解决方案。
1.6.2. 偏航距离的计算
由于已经获得了赛道中心线的位置,所以计算偏航距离的问题是选取何处的中
心线的距离为当前的偏航距离。控制算法的执行周期为 40ms,如果赛车的速度为
2m/s,则在两次控制算法的执行中间,赛车要前进 8cm,赛车所处的环境将发生比
较大的改变,所以赛车的控制只能算是半实时控制,这是所有使用摄像头作为主要
寻线传感器的参赛队都避免不了的问题。因为算法的滞后性,赛车需要将“当前位
置”进行适当前移。前移量应该跟赛车当前速度成正比,但实际中我们发现,适当
增加一些前移距离是有好处的,因为可以在入弯处提前转弯,使得赛车沿弯道内侧
行驶,缩短了过弯距离。
1.6.3. 舵机参数测定
通过实验测出已安装在模型车上的舵机的中位值(),
模型车转向轮左右极限时舵机( !、"#$)值是舵机控制
的基础。
测试舵机中位时,先在舵机控制模块中给舵机设计一个全局变量
(%&),将赛车放在长直道上,保证车身放正并处于赛道正中间,利
用'(查看此时%&的值,将此值直接赋给舵机,并将赛车放到直
道上跑,看是否跑偏,微调%&的值,直到赛车在直道上不再跑偏为止。
测定舵机左右极限时,可根据转向轮的左右极限转角,利用'(查看舵机
!和"#$的值。注意转向轮在左右极限转角时,转向轮不可被赛
车底盘卡住,这样不但会增加转向阻力,严重时还可能使转向轮抱死,失去转向能
力。
舵机的计算公式为:
%&)*+ !,"#$-.
"&/#0&123"4566公式四
式中"&/#0&1为每行采集的点数,
3"为黑线在整幅图像中的位置。
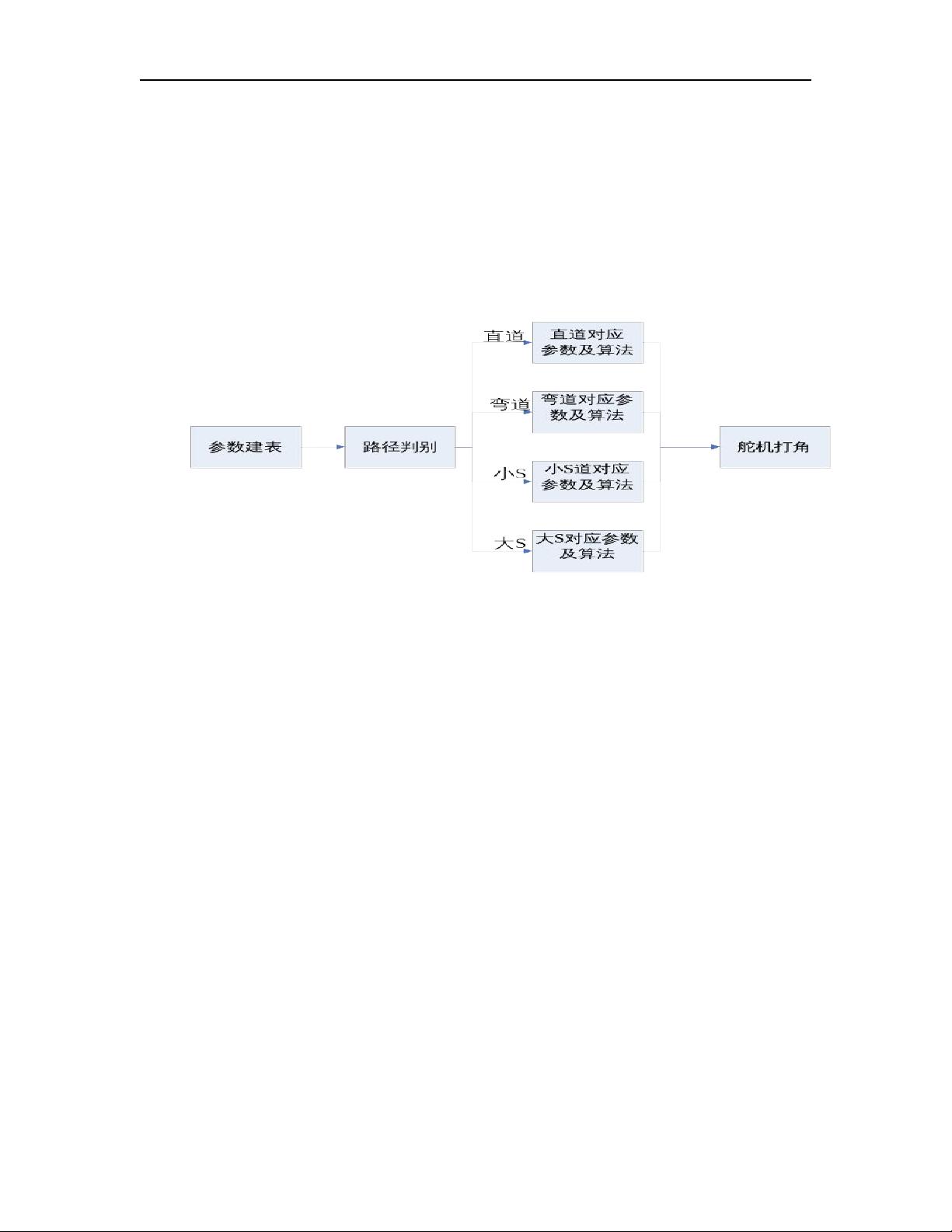
1.6.4. 路径规划
要想以最短的时间完成比赛,并不需要严格按照黑色引导线行驶,我们需要找
出相对较短的行驶路径,即路径规划。例如 过普通弯道的时候,以同样的速度走

剩余63页未读,继续阅读
2018-10-23 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-04-07 上传
2015-11-26 上传
2011-03-06 上传
2011-11-05 上传

ainiyiwannian100
- 粉丝: 1
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







