服务与现场机器人技术综述:Mejias, Corke & Roberts编
需积分: 10 38 浏览量
更新于2024-07-18
收藏 68.9MB PDF 举报
《Field and Service Robot》是由Jonathan Roberts担任编辑的一本专著,它作为Springer Tracts in Advanced Robotics系列的第105卷,专注于实地和服务型机器人的研究与实践。这本书深入探讨了机器人技术的关键领域,包括运动学与动力学模型、控制算法以及运动规划策略。
在本书中,作者Luis Mejias和Peter Corke共同编撰,集结了国际第九届会议的结果,这些会议反映了当前机器人技术的前沿进展。书中内容涵盖了机器人设计中的基础理论,如机械结构如何影响其运动性能,以及如何通过精确的运动学模型来理解和预测机器人的行为。运动学模型是理解机器人如何在空间中移动和操作的基础,它涉及到关节角度、位姿和速度的数学表示。
动力学模型则进一步关注机器人在执行任务时的能量消耗、力的传递以及加速度分析。通过理解这些模型,工程师能够优化机器人的能量效率,确保其在复杂环境中能稳定且有效地工作。控制算法则是实现机器人自主决策和动作的关键,包括经典的PID控制器、模型预测控制(MPC)等,它们确保机器人能够准确响应外部输入并达到预设目标。
运动规划算法部分,本书探讨了如何设计高效的路径规划和避障策略,使服务机器人能够在动态环境中避免碰撞,同时执行复杂的任务路径。这通常涉及到路径搜索算法(如A*算法)、轨迹优化以及实时决策制定,以适应不断变化的环境条件。
此外,书后的编辑顾问团队由国际知名学者组成,他们的专业知识和经验为读者提供了更广阔的视野,展示了机器人技术在全球不同学术背景下的多元化发展。例如,来自斯坦福大学的Oussama Khatib,以其在人工智能领域的贡献,强调了机器学习和自主控制在服务机器人领域的潜力。
《Field and Service Robot》是一本综合性的著作,不仅适合学生和研究人员,也对工业界工程师有着重要的参考价值,因为它提供了关于如何将理论知识转化为实际应用的实用指导。对于那些希望在机器人技术特别是实地服务应用领域深入探索的人来说,这本书是不可或缺的资源。
4 M.S. Bewley et al.
reduce the current dependence that marine scientists have on extrapolating
information from a relatively small number of sparsely labelled points.
1 Introduction
Autonomous Underwater Vehicles (AUVs) have made a significant impact
on areas of marine science that require an understanding of the sea floor [2,
3, 4]. Common practice is shifting from using human divers with hand-held
cameras, to sending AUVs equipped with stereo cameras and other sensors
to capture benthic images. These AUVs are capable of capturing far more
data, both in the type (various sensor modalities) and volume (a several
hour mission can collect tens of thousands of spatially registered stereo image
pairs). In addition, the imagery is geo-referenced far more precisely, and data
can be gathered from beyond diver depths. While using an AUV improves
the raw data in many ways, the sheer volume of it introduces a new problem
for interpretation.
For marine scientists studying the location, distribution and coverage of
benthic organisms and morphology, the state of the art is to take a small
subset of images from an AUV survey, and manually label the content. For
the data set used in this paper [5], biological species and physical formations
under 50 randomly selected pixels from every 100
th
image were labelled.
The scientists then extrapolate from this subset, to make inferences about
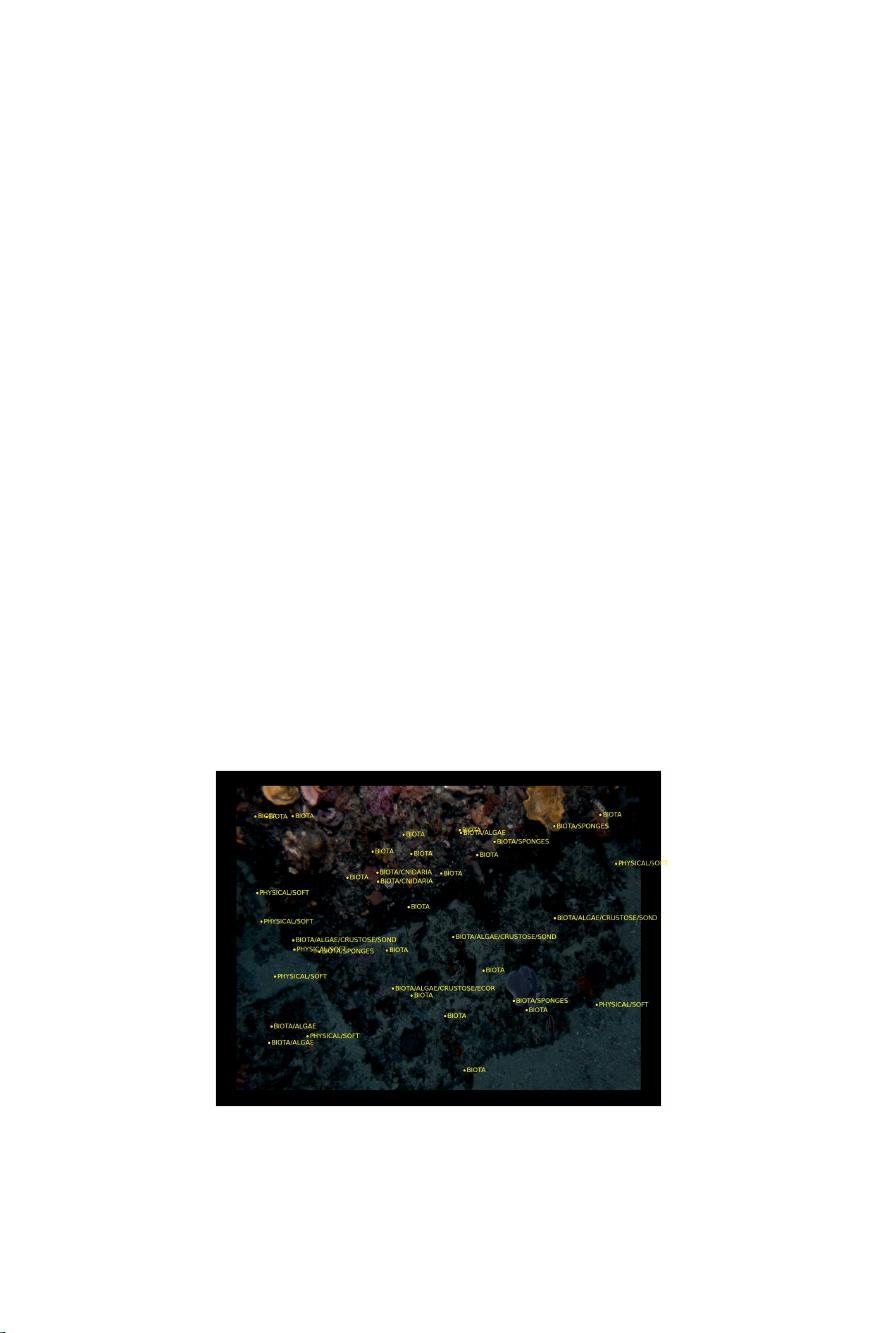
the ecosystems and populations in the geographic area. Figure 5 shows an
example image from our data set (described in Section 3) where 50 randomly
selected pixels have been labelled using the CPCe labelling software [6].
Fig. 1 Example AUV image, with CPC point labels



剩余522页未读,继续阅读
2024-08-31 上传
2018-03-20 上传
2021-02-20 上传
2023-07-20 上传
2023-05-03 上传
2023-06-03 上传
2023-08-27 上传
2023-05-05 上传
2023-06-02 上传
2023-04-01 上传

凌寒画家
- 粉丝: 14
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
