

然而一般情况下,我们不容易获得它的运动学反解,是因为它的反解通常就是多
解,所以在现实情况下,通常运用几何机械臂的运动学解。
2.2 二自由度机械臂运动学正解
已知:关节 1 连杆长度
1
l
,关节的值为
1
q
(如下图所示);关节 2 连杆长度
2
l
,
关节的值为
2
q
(角度如下图所示)
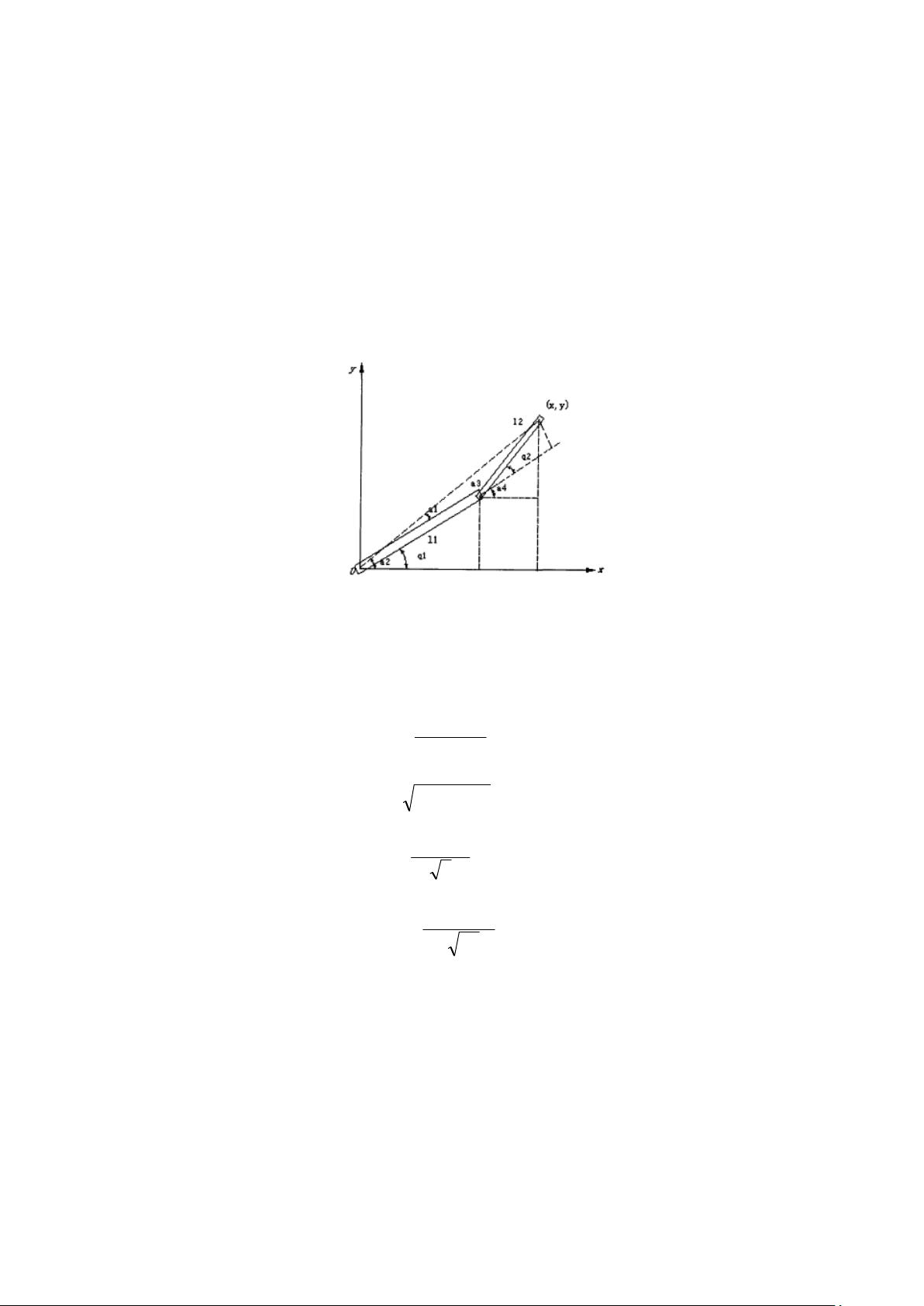
求解:记下图中关节连杆末端对象固定点的直角空间坐标:
],[ yxx �
图 2.1 机械臂运动学的正解
机械臂操作端的位置方程为:
�
�
�
���
���
)sin(sin
)cos(cos
21211
21211
qqlqlP
qqlqlP
y
x
(2.4)
� �
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
2
1
�
�
�
�
�
�
�
J
P
P
y
x
(2.5)
上述方程的 Jacobian 矩阵
� �
�
J
为
� �
� � � �
� � � �
�
�
�
�
�
�
���
�����
�
21221211
21221211
coscoscos
sinsinsin
�����
�����
�
lll
lll
J
机械臂的动力学方程为
� �
� �
� �
τθGθθNθθM ��� ,
���
(2.6)
其中,
� �
T
21
��
�τ
为总的驱动力矩矢量,
� �
T
21
��
�θ
为转动角度矢量;
� �
θM
为转动惯量矩阵,
� �
θθN ,
�
为 Coriolis 离心转矩,
� �
θG
为重力矢量。
� �
θM
、
剩余52页未读,继续阅读

南抖北快东卫
- 粉丝: 73
- 资源: 5588

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 电力电子系统建模与控制入门
- SQL数据库基础入门:发展历程与关键概念
- DC/DC变换器动态建模与控制方法解析
- 市***专有云IaaS服务:云主机与数据库解决方案
- 紫鸟数据魔方:跨境电商选品神器,助力爆款打造
- 电力电子技术:DC-DC变换器动态模型与控制
- 视觉与实用并重:跨境电商产品开发的六重价值策略
- VB.NET三层架构下的数据库应用程序开发
- 跨境电商产品开发:关键词策略与用户痛点挖掘
- VC-MFC数据库编程技巧与实现
- 亚马逊新品开发策略:选品与市场研究
- 数据库基础知识:从数据到Visual FoxPro应用
- 计算机专业实习经验与项目总结
- Sparkle家族轻量级加密与哈希:提升IoT设备数据安全性
- SQL数据库期末考试精选题与答案解析
- H3C规模数据融合:技术探讨与应用案例解析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


